|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ОБЩИЕ СВЕДЕНИЯ О ТЕХНИЧЕСКИХ СРЕДСТВАХ АВТОМАТИЗАЦИИ И УПРАВЛЕНИЯСтр 1 из 18Следующая ⇒
ОБЩИЕ СВЕДЕНИЯ О ТЕХНИЧЕСКИХ СРЕДСТВАХ АВТОМАТИЗАЦИИ И УПРАВЛЕНИЯ
Производственные процессы характеризуются множеством регулируемых величин: температурой, давлением, расходом, концентрацией и т. д., которые называются параметрами процесса. Чтобы технологическое оборудование работало в требуемом режиме, то есть с высоким КПД, с заданной производительностью, давало продукцию необходимого качества и работало надежно, необходимо поддерживать величины, характеризующие процесс, в большинстве случаев постоянными. Эта важнейшая задача возложена на промышленные системы автоматического регулирования и стабилизации технологических процессов. Промышленные системы регулирования занимают второй уровень современных иерархических систем управления технологическими процессами. Их главная задача состоит в том, чтобы стабилизировать технологические параметры на заданном уровне. Этим занимаются системы автоматической стабилизации. В этих системах сигнал задания (уставка регулятора) остается постоянным в течение длительного времени работы. Другой, не менее важной задачей, является задача программного управления технологическим агрегатом, что обеспечивает переход на новые режимы работы. Решение этой проблемы осуществляется с помощью той же системы автоматической стабилизации, задание которой изменяется от программного задатчика. В современных технологических комплексах имеются сотни и тысячи контуров регулирования, от качественной работы которых во многом зависит качество выдаваемой продукции. Поэтому для большинства промышленных САР необходима достаточно высокая точность их работы. При этом главное назначение системы стабилизации - это компенсация внешних возмущающих воздействий, действующих на объект управления.
Основные понятия и определения Измерительный преобразователь - техническое средство с нормативными метрологическими характеристиками, служащее для преобразования измеряемой величины в другую величину или измерительный сигнал, удобный для обработки, хранения, дальнейших преобразований, индикации и передачи. ИП или входит в состав какого-либо измерительного устройства (измерительного прибора, датчика) или применяется вместе с каким-либо средством измерения. Датчик - конструктивно обособленный элемент измерительной или регулирующей системы, предназначенный для преобразования измеряемой физической величины в удобный для считывания или дальнейшего использования и обработки сигнал. Регулятор - следит за работой объекта управления как системы и вырабатывает для неё управляющие сигналы. Регуляторы следят за изменением некоторых параметров объекта управления и реагируют на их изменение с помощью некоторых алгоритмов управления в соответствии с заданным качеством управления. Управляющий (технологический) контроллер – автоматическое (как правило, микропроцессорное) устройство, содержащее различные каналы ввода/вывода и предназначенное для решения задач управления техническими/технологическими процессами. Автоматизированная система управления или АСУ — комплекс аппаратных и программных средств, предназначенный для управления различными процессами в рамках технологического процесса, производства, предприятия. АСУ применяются в различных отраслях промышленности, энергетике, транспорте и т.п. Автоматизированная система управления технологическим процессом или АСУ ТП — решает задачи оперативного управления и контроля. Функции автоматизированных систем управления и требования к ним
Технические средства автоматизации и управления применяются в составе автоматизированных систем управления, рассмотрим их функции и требования к ним.
Система управления процессом обычно выполняет много различных функций, которые можно разделить на три большие группы (рис. 1.1.): · сбор и оценка данных технологического процесса - мониторинг; · управление некоторыми параметрами технического процесса; · связь входных и выходных данных - обратная связь, автоматическое управление.
Рис. 1.1 Основные функции системы управления Мониторинг Мониторинг процесса или сбор информации о процессе - это основная функция, присущая всем системам управления. Мониторинг - это сбор значений переменных процесса, их хранение и отображение в подходящей для человека-оператора форме. Мониторинг может быть ограничен лишь выводом первичных или обработанных данных на экран монитора или на бумагу, а может включать более сложные функции анализа и отображения. Например, переменные, которые нельзя непосредственно измерить, должны рассчитываться или оцениваться на основе имеющихся измерений. Другой классической чертой мониторинга является проверка того, что измеренные или рассчитанные значения находятся в допустимых пределах. Когда функции системы управления процессом ограничены сбором и отображением данных, все решения об управляющих действиях принимаются оператором. Этот вид управления, называемый супервизорным или дистанционным управлением, был очень распространен в первых системах компьютерного управления процессами. Он до сих пор применяется, особенно для очень сложных и относительно медленных процессов, где важно вмешательство человека. Примером являются биологические процессы, где определенную часть наблюдений нельзя выполнить с помощью автоматики. При поступлении новых данных их значение оценивается относительно допустимых границ. В более развитой системе контроля несколько результатов могут комбинироваться на основе более или менее сложных правил для проверки, находится ли процесс в нормальном состоянии или вышел за какие-либо допустимые пределы. В еще более современных решениях, в особенности построенных на экспертных системах или базах знаний, комбинированная оперативная информация от датчиков объединяется с оценками, сделанными операторами. Управление Управление - это функция, обратная мониторингу. В прямом смысле управление означает, что команды управляющего контроллера поступают к исполнительным механизмам для воздействия на физический процесс. Во многих случаях на параметры процесса можно воздействовать только опосредованно через другие параметры управления. Автоматическое управление Система, которая действует автономно и без прямого вмешательства оператора, называется автоматической. Система автоматического управления может состоять из одного или нескольких простых контуров управления (одного для каждой пары входных и выходных переменных процесса), а также из более сложных регуляторов со многими входами и выходами. Система может быть одноуровневой (локальной), т.е. решать задачи управления для одного объекта - одним, не связанным с другими регулятором (контроллером). Рассмотрим простую локальную, одноканальную систему управления (рис.1.2.):
Рис. 1.2 На рис. 1.2. приняты следующие обозначения: ИП – измерительный преобразователь; НП – нормирующий преобразователь; Д – датчик; ОУ – объект управления (технологический объект); Р – регулятор; ИУ – исполнительное устройство; ЛС – линии связи. Теперь изобразим эту схему, используя элементы теории автоматического управления (рис.1.3.):
Рис. 1.3 На рис.1.3. приняты следующие обозначения: Зд – задающее устройство; Х - сигнал задания; АР – автоматический регулятор; ε - рассогласование; УМ – усилитель мощности; Z - возмущение. ИМ – исполнительный механизм; РО – рабочий орган; ОУ – объект управления; НП – нормирующий преобразователь; Д – датчик. Регулятор по сигналу рассогласования формирует управляющее воздействие. Характерной особенностью схемы является наличие нормирующего преобразователя НП, обеспечивающего работу автоматического регулятора со стандартными значениями тока (0-5 mA) или напряжения (0-10 В). Нормирующий преобразователь выполняет следующие функции: 1) преобразует нестандартный входной сигнал (mB) в стандартный выходной сигнал; 2) осуществляет фильтрацию входного сигнала; 3) осуществляет линеаризацию статической характеристики датчика с целью получения линейного диапазона; 4) применительно к термопаре, осуществляет температурную компенсацию холодного спая термопары.
Пример — регулятор температуры Рассмотрим бак, заполненный жидкостью, температура которой должна поддерживаться постоянной (рис. 1.4.). Все сигналы в этом примере - аналоговые, т. е. изменение температуры отслеживается непрерывно.
Если теплоемкость бака велика, то постоянная времени имеет относительно большое значение. Наоборот, если объем бака небольшой, а нагреватель мощный, то постоянная времени процесса мала и система управления должна достаточно часто включать или отключать нагреватель. Таким образом, при проектировании системы управления должны быть учтены основные динамические характеристики процесса.
Система может быть многоуровневой, т.е. состоять например, из локальных контроллеров и центральной управляющей ЭВМ. Для многоуровневых систем управления существуют два основных подхода к реализации обратной связи: · прямое цифровое управление (ПЦУ, Direct Digital Control - DDC) центральная ЭВМ рассчитывает управляющие сигналы для исполнительных устройств. Все данные наблюдения передаются в полном объеме от датчиков к центру управления, а управляющие сигналы - обратно к исполнительным устройствам. · распределенное прямое цифровое управления (Distributed Direct Digital Control - DDDC) вычислительная система имеет распределенную архитектуру, а цифровые регуляторы реализованы на основе локальных процессоров, т. е. расположены вблизи технического процесса. ЭВМ верхних уровней управления рассчитывают опорные значения, а локальные процессоры ответственны главным образом за непосредственное управление техническим процессом, т. е. выработку управляющих сигналов для исполнительных механизмов на основе данных локального мониторинга. Эти локальные ЭВМ включают в себя цифровые контуры управления. Различие между прямым цифровым управлением и распределенным прямым цифровым управлением заключается в том, что в первом случае, даже при наличии нескольких ЭВМ, они занимаются только передачей информации и не принимают решений (кроме центрального ЭВМ) об управляющих действиях. Напротив, в распределенной структуре ЭВМ на уровнях процесса, участка и общего управления могут действовать более или менее автономно и не зависят от центральной ЭВМ. Как уже указывалось, это различие влияет и на надежность сложной системы. При отказе центральной ЭВМ, управляющая система типа ПЦУ останавливается, а распределенная система, даже при отказе одного или нескольких элементов, хотя и утратит часть функций, но будет продолжать работу. Более простая и архаичная форма автоматизированного управления - это так называемое управление опорными значениями (setpoint control). ЭВМ рассчитывает опорные значения, которые затем передаются обычным аналоговым регуляторам. В этом случае ЭВМ применяется только для вычислений, а не для измерений или генерации управляющих воздействий.
Требования к промышленным системам управления
Основные требования к промышленным системам управления: 1) Промышленная САУ должна обеспечивать устойчивое управление процессом во всем диапазоне нагрузок на технологический агрегат. 2) Система должна обеспечивать в окрестности рабочей точки заданное качество процессов управления (время переходного процесса, перерегулирование и колебательность). 3) Система должна обеспечивать в установившемся режиме заданную точность регулирования. Желательно обеспечить нулевую статическую ошибку регулирования. Кроме этого желательно обеспечить заданную дисперсию ошибки регулирования. Все эти условия будут выполняться, если объект управления является стационарным, либо его вариации параметров достаточно малы и компенсируются запасами устойчивости системы. Этому способствует то, что большинство промышленных систем – это системы автоматической стабилизации заданных параметров. Серийные регуляторы обеспечивают устойчивый процесс регулирования подавляющего большинства промышленных объектов при условии, что правильно выбраны настройки регулятора. Чем выше требования к качеству регулирования, тем более сложной и дорогой будет система. Поэтому при создании САУ стремятся найти разумный компромисс между качеством регулирования и затратами на автоматизацию технологического процесса.
Пневматические сигналы. Используются там, где не применимы электрические связи (например, во взрывоопасных помещениях). Существуют ГОСТы пневматических сигналов: 0..1 ати (атмосфер технических избыточных) – аналоговые сигналы. Дискретный сигнал: 1 ~ (0.9…1.54) ати 0 ~ (0…0.1) ати.
Гидравлический сигнал. Применяется для управления гидравлическими исполнительными механизмами. Так как гидравлические сигналы используются для передачи информации внутри функционально законченных элементов, то они не стандартизованы.
Диапазон изменения унифицированного сигнала не зависит от измеряемой величины и метода измерения. Интерфейс – система унифицированных связей, сигналов, программных и аппаратных средств, с помощью которых устройство информационно управляемой техники обменивается друг с другом. В состав интерфейса входят: - перечень сигналов взаимодействия устройств и правило обмена этими сигналами – протокола обмена. - совокупность технических средств, осуществляемых прием-передачу информации по линиям связи: конструкционные элементы (разъем, кабели), обеспечивающие соединения узлов без разработки дополнительных средств (например, ETHERNET или пример телефона с разъемами). Конструктивная совместимость - это совместимость свойств, обеспечивающих согласованность конструктивных параметров и механическое сопряжение технических средств, а также выполнение эргономических норм и эстетических требований. Эксплуатационная совместимость - это совместимость свойств, обеспечивающих работоспособность и надежность функционирования технических средств при совместном использовании в производственных условиях. Метрологическая совместимость - это совместимость выбранных метрологических характеристик и свойств средств измерений, обеспечивающих сопоставимость результатов измерений и возможность расчета погрешности при работе в составе системы.
Датчики положения
В качестве датчиков положения (position sensor) в течение многих десятилетий используются концевые выключатели. Они состоят из электрических контактов, которые механически размыкаются или замыкаются, когда какая-либо переменная (положение, уровень) достигает определенного значения. Концевые выключатели (limit switch) различных типов являются важной частью многих систем управления, надежность которых существенно зависит именно от них, т.к. такие датчики содержат подвижные механические элементы ресурс которых ограничен.
На рис. 2.2 показаны контактные группы в нормальном положении и при срабатывании. На схемах контакты выключателя обычно изображают в нормальном положении.
Рис. 2.2. Различные обозначения выключателей
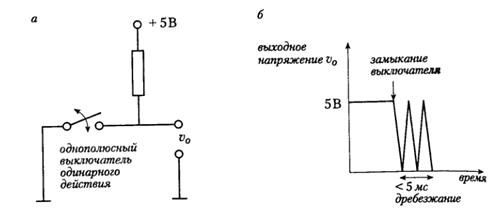
Простое согласование сигналов для можно обеспечить с помощью нагрузочного резистора рис 2.3. Когда выключатель разомкнут, с ключа снимается напряжение +Uп, воспринимаемое как логическое состояние высокого уровня (1). Если контакт замкнут, выходной сигнал равен потенциалу земли, что воспринимается логическое состояние низкого уровня (0). Замыкание механического выключателя обычно вызывает проблемы, поскольку контакты вибрируют (" дребезжат" ) несколько миллисекунд, прежде чем замкнуться Рис. 2.3 б). Когда важно зафиксировать только первое касание, как в случае концевого выключателя, принимать во внимание последующие замыкания и размыкания контактов из-за дребезжания нет необходимости. Применение цепи, обеспечивающей небольшое запаздывание выходного сигнала, является одним из способов преодоления эффекта дребезжания контактов.
Рис. 2.3. Дребезжание контактов при замыкании выключателя
Существуют другие методы определения положения с помощью бинарных датчиков, некоторые из которых приведены ниже. Ртутные выключатели состоят из небольших герметически запаянных стеклянных трубок с контактными выводами. Трубка содержит достаточное количество ртути, чтобы замкнуть контакты. Выключатель размыкает и замыкает контакты при изменении положения (наклона) трубки. Магнитоуправляемое герметичное язычковое реле — геркон (reed switch, reed relay) состоит из двух плоских пружин, запаянных в небольшую стеклянную трубку. Свободные концы пружин находятся друг над другом с очень небольшим зазором между ними. Когда к трубке приближается магнит, пружины намагничиваются в разных направлениях, притягиваются друг к другу и замыкаются. Фотоэлектрические датчики выполнены из материалов, которые изменяют сопротивление или генерируют разность потенциалов под влиянием света. Во многих устройствах достаточно бинарной индикации — есть свет или нет. Фотоэлектрический лучевой детектор состоит из источника светового луча и светочувствительного элемента. Существует много конструкций светодетекторов, которые отличаются в основном тем, отражается или прерывается световой луч фиксируемым объектом. Преимущества светодетекторов — простота, гибкость, низкая стоимость и главное, фиксация может выполняться без непосредственного физического контакта. На базе фотоэлектрических лучевых детекторов легко строятся измерители частоты вращения, счетчики, датчики положения и т. д. Ультразвуковые и микроволновые датчики используются для обнаружения объектов на расстояниях от нескольких сантиметров до нескольких метров. Эти датчики работают в режиме отражения (излучатель и приемник заключены в одном приборе) или на принципе прерывания луча (излучатель и приемник расположены в разных устройствах). Пороговые датчики
Биметаллический элемент представляет собой два сваренных между собой различных металла 1 и 2, Рис.2.4., имеющих разный температурный коэффициенты линейного расширения (ТКЛР). При изменении температуры меняются геометрические параметры конструкции. Используются также в качестве датчиков достижения определенной температуры (напр. в электрочайнике)
Индикаторы уровня
Индикатор уровня (level switch) срабатывает, если резервуар заполнен до заданной высоты. Принцип работы зависит от свойств контролируемого вещества - жидкость, цементный раствор, гранулы или пыль. Индикатор может либо показывать текущий уровень, либо выдавать сигнал, когда достигается заданный уровень. Поплавок, находящийся на поверхности жидкости, при достижении определенного уровня действует как концевой выключатель. Герконы являются идеальными выключателями для жидкой среды, поскольку они водонепроницаемы. На поплавке должен быть установлен магнит, чтобы вызвать срабатывание контактов геркона. Для той же цели часто используются фотоэлектрические датчики. Для твердых материалов применяются емкостные датчики приближения (proximity sensors). По мере повышения уровня заполнителя из пространства между стенкой сосуда и емкостным зондом вытесняется воздух и поэтому изменяется емкость образованного ими конденсатора, которую можно измерить стандартными методами. Уровень можно измерить и датчиком давления, помещенным на дно сосуда, поскольку величина давления у дна прямо пропорциональна высоте столба вещества. В этом случае может вырабатываться как аналоговый (индикация текущего уровня), так и бинарный (достигнут пороговый уровень) сигнал. Пример - Датчики положения вала Датчики положения вала или кодеры поворота (shaft encoders) — это цифровые датчики для измерения угла поворота и угловой скорости. Они применяются во всех системах, где нужна точная информация о параметрах вращательного движения, - например, станки, роботы, сервосистемы и электропривод. Существуют датчики относительного (incremental) и абсолютного (absolute) типов. Датчик относительного типа состоит из светодетектора или магнитного датчика, например геркона, который генерирует последовательность импульсов при вращении объекта; поворот на 360 град. соответствует одному или более импульсам. Затем последовательность импульсов обрабатывается и преобразуется в угол поворота и угловую скорость объекта. Датчик абсолютного типа выдает угол поворота объекта в двоичном коде. Оптический датчик состоит из диска с прорезями и светонепроницаемыми участками, причем каждая прорезь уникальна и соответствует определенному углу поворота. Источник света освещает одну сторону диска, а на другой стороне блок датчиков фиксирует световой шаблон (т. е. через какие свет проходит, а через которые – нет), которому соответствует цифровое значение угла поворота. Кодирование обычно осуществляется на основе модифицированного двоичного алгоритма, чтобы минимизировать ошибки смещения фотоэлектрических датчиков относительно прорезей в диске. Эта простая технология обеспечивает высокие разрешение (которое определяется числом прорезей на градус углового смещения или на оборот диска) и точность, а так же хорошую помехоустойчивость при передаче сигналов, поскольку не требует аналого-цифрового преобразования.
Датчики движения
Датчики движения(motion sensors) измеряют четыре кинематические величины: o перемещение (изменение положения, расстояния, степени приближения, размера) o скорость (включая угловую); o ускорение; o удар. Каждая из этих величин является производной по времени от предшествующей. Теоретически можно измерить только одну из них и затем получить остальные дифференцированием или интегрированием. На практике, однако, такой подход неприемлем из-за природы сигнала (постоянный, переходный и т. д.), частотного спектра шумов и возможностей средств обработки данных. Контроль параметров движения обязателен для приложений, в которых используется механическое оборудование - сервосистемы, роботы, электроприводы или другие манипуляторы. Измерение перемещений применяется при управлении положением клапанов. Толщина пластин в прокатном стане постоянно контролируется системой управления калибровкой. Датчики деформаций - это устройства, которые измеряют механическое напряжение, давление и силу, но могут применяться и для измерения перемещений. В системах мониторинга состояния и предупреждения отказов механического оборудования широко используются акселерометры. Для измерения параметров движения применяются следующие типы устройств: o потенциометры для измерения перемещений; они работают как переменные резисторы; o датчики на основе принципа электромагнитной индукции, например дифференциальные трансформаторы, резольверы, синхротранс-форматоры (сельсины) o емкостные датчики для измерения малых перемещений, вращений и уровней жидкости; o пьезоэлектрические датчики для измерения давления, напряжения, ускорения, скорости, силы и момента (пьезоэлектрический материал деформируется под действием приложенной разности потенциалов или вырабатывает разность потенциалов при механическом воздействии); o лазерные датчики для точного измерения малых перемещений; o ультразвуковые датчики для измерения расстояний в медицинских приборах, системах автофокусировки фото- и телекамер, измерения уровня и скорости.
Пример - Резольвер
Резольверы применяются в приложениях, где требуется очень точное измерение угловых перемещений и скорости, например в сервосистемах и роботах. Выходной сигнал резольвера - это мера углового перемещения, дифференцирование этого сигнала дает угловую скорость. Резольвер работает на принципе измерения взаимоиндукции между двумя обмотками (рис. 2.5).Ротор резольвера соединен с вращающимся объектом. На первичную обмотку ротора подается переменное напряжение vref. Статор состоит из двух обмоток, развернутых на 90° друг относительно друга. Напряжение на этих обмотках
соответственно, где θ - угловое положение ротора.
Рис. 2.5. Принцип работы резольвера
Можно сказать, что выходные напряжения vо1 и vо2 представляют собой напряжение vref промодулированное величиной угла θ. Используя одно из выходных напряжений, можно однозначно измерить углы лишь в диапазоне 0-90°, оба сигнала позволяют однозначно измерять углы от 0е до 360°. Выход резольвера есть тригонометрическая функция угла. Эта нелинейность, однако, не всегда является недостатком. Например, при управлении вращающими моментами в роботах требуются именно тригонометрические функции углов поворота. Поэтому выходной сигнал резольвера можно непосредственно использовать для управления без дополнительного преобразования в реальном времени, которое увеличило бы загрузку управляющего контроллера. Проблемы при работе резольвера могут возникать только из-за щеток ротора (износ, дополнительные шумы и механические нагрузки). Резольверы поставляются в виде полнофункциональных автономных устройств. Пример - Тахометр
Тахометр представляет собой генератор постоянного тока с постоянными магнитами, применяемый для измерения угловой скорости. Принцип его действия иллюстрируется рис. 2.6.
Рис. 2.6. Принцип работы тахометра постоянного тока
Магниты создают постоянное однородное магнитное поле. Движение проводника в поле индуцирует напряжение, пропорциональное скорости его вращения. Ротор непосредственно соединен с объектом, скорость вращения которого измеряется. Выходное напряжение, генерируемое в процессе вращения, снимается коллектором, который состоит из пары угольных щеток с низким сопротивлением. Тахометр обычно создает очень маленькую дополнительную механическую нагрузку для больших валов, на которые он устанавливается. Анализируя динамику тахометра, можно утверждать, что его частотный диапазон обычно значительно шире, чем у механического двигателя при его нормальной нагрузке. Поэтому индуктивность и другие электромагнитные параметры тахометра обычно не влияют на результаты измерения. Датчики силы, момента
Многие типы датчиков силы/момента (force/torque) основаны на измерении деформаций. Датчики для измерения деформаций называются тензодатчиками. Принцип действия таких датчиков - изменение электрического сопротивления в образце, который подвергается воздействию внешних сил (пьезорезистивный эффект). Относительное изменение сопротивления как функция действующей на датчик силы зависит от используемого материала: у полупроводникового датчика оно на 1-2 порядка больше, чем у металлического. Чувствительный элемент у полупроводникового датчика выполнен из монокристалла пьезорезистивного материала. Дополнительное преимущество полупроводниковых тензодатчиков - более высокое удельное сопротивление по сравнению с металлическими и, соответственно, меньшее потребление мощности и выделение тепла. Измерение моментов и сил необходимо во многих задачах, включая управление точным движением (например, перемещения и захваты в робототехнике) и передаваемой механической мощностью в двигателях и системах привода. Момент можно измерить либо на основе напряжений, возникающих в материале, либо на основе деформации (прогиба). Измеряя угол скручивания оси датчиком углового перемещения, можно определить приложенный момент.
Датчики приближения
Изменение электрических свойств элементов колебательных контуров при приближении к внешним объектам можно использовать для создания датчиков приближения. Эти датчики могут выдавать аналоговый сигнал, пропорциональный - но крайней мере в определенном диапазоне-— расстоянию до заданного объекта, или цифровой сигнал при достижении заданного порогового значения расстояния. Электрические датчики приближения используют следующие принципы: Индуктивные датчики приближения работают на основе излучения высокочастотного электромагнитного поля обмоткой, которая входит в колебательный контур. Электромагнитное поле индуцирует в проводящем материале объекта вихревые токи. Когда объект, расстояние до которого контролируется, приближается к датчику (обычно на 2-30 мм), колебания начинают затухать. Изменение тока в колебательном контуре можно использовать для срабатывания полупроводникового ключа. Емкостные датчики приближения содержат затухающий колебательный RC-контур. Емкость зависит от расстояния между обкладками конденсатора, их площади и свойств диэлектрика между ними. Датчик присоединен к одной из обкладок или к диэлектрику. Когда объект приближается к датчику, результирующее изменение емкости, а следовательно, и частоты колебаний, можно зафиксировать электрически и использовать для управления выключателем. Емкостный датчик может обнаружить объекты, которые не являются проводящими. Диапазон срабатывания для таких датчиков обычно лежит между 5 и 40 мм. Емкостные датчики можно использовать также для измерения силы и давления. Магнитные датчики приближения опознают приближение объекта по изменению характеристик магнитного поля и не имеют подвижных частей. Принцип работы может базироваться на индуктивности, магнитном сопротивлении, магниторезистивном эффекте или эффекте Холла. Магниторезистивный эффект и эффект Холла обусловлены одним и тем же физическим явлением - сопротивление проводящего материала изменяется под воздействием внешнего магнитного поля. Если проводник с электрическим током подвергся воздействию магнитного ноля, его сопротивление увеличивается (магниторзистивный эффект). Кроме того, на противоположных сторонах этого проводника возникает разность потенциалов, которую можно измерить (эффект Холла). Проводник должен быть расположен так, чтобы магнитное поле было перпендикулярно направлению тока; разность потенциалов возникает вдоль оси, перпендикулярной и магнитному полю, и направлению тока. Геометрическая форма проводника выбирается так, чтобы максимальным был либо магниторезистивный эффект, либо эффект Холла. Датчики Холла часто выполняются из полупроводниковых материалов.
Законы термопары.
Выводы:
б) также позволяет использовать удлинительные провода для подключения термопар к измерительным приборам. Поэтому можно использовать медные провода на больших расстояниях, что экономически выгодно! Термистор
Термистор (thermistor), т. е.температурно-зависимый резистор, изготавливается из полупроводникового материала, имеющего отрицательный температурный коэффициент и высокую чувствительность. Его сопротивление нелинейно зависит от температуры
где Т- температура в градусах Кельвина, R0 — сопротивление при опорной температуре Т0 (обычно 298 °К, т. е. 25 °С ), а Р - постоянная (обычно 3000-5000 °К). Наклон кривой R-Т(рис. 2.15) соответствует температурному коэффициенту а, который, в свою очередь, является функцией температуры
Значение коэффициента а обычно лежит в диапазоне от -0.03 до -0.06 К↑ -1 при 25°С (298К). Из-за конечного сопротивления термистора при протекании по нему тока выделяется тепло. Энергия, выделяемая в термисторе при 25 °С, имеет обычно порядок 0.002 мВт. При постоянной рассеяния около 1 мВт/ °С температура датчика будет повышаться на 1 °С (на воздухе) на каждый милливатт рассеиваемой мощности. Популярное:
|
Последнее изменение этой страницы: 2016-05-03; Просмотров: 1225; Нарушение авторского права страницы



 Температура измеряется датчиком, выходное напряжение которого пропорционально текущей температуре (пропорциональная зависимость существует как минимум в интересующем диапазоне температур). Текущее значение температуры сравнивается с требуемым(опорным) значением, которое хранится в памяти регулятора. Величина рассогласования рассчитывается по разности между опорным и измеренным качениями.
Температура измеряется датчиком, выходное напряжение которого пропорционально текущей температуре (пропорциональная зависимость существует как минимум в интересующем диапазоне температур). Текущее значение температуры сравнивается с требуемым(опорным) значением, которое хранится в памяти регулятора. Величина рассогласования рассчитывается по разности между опорным и измеренным качениями. В зависимости от исполнительного механизма - устройства, непосредственно влияющего на процесс, - меняется вид управляющего сигнала, подающегося на его вход. Температуру можно регулировать с помощью нагревателя, периодически включаемого на заданный интервал времени, или использовать теплообменник, соединенный с трубопроводами пара и холодной воды. В первом случае управляющим действием является момент включения нагревателя; во втором - регулирование осуществляется за счет открытия или закрытия клапанов трубопроводов пара и охлаждающей жидкости.
В зависимости от исполнительного механизма - устройства, непосредственно влияющего на процесс, - меняется вид управляющего сигнала, подающегося на его вход. Температуру можно регулировать с помощью нагревателя, периодически включаемого на заданный интервал времени, или использовать теплообменник, соединенный с трубопроводами пара и холодной воды. В первом случае управляющим действием является момент включения нагревателя; во втором - регулирование осуществляется за счет открытия или закрытия клапанов трубопроводов пара и охлаждающей жидкости.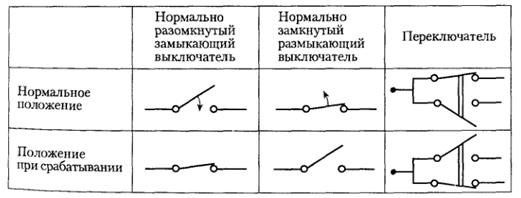
 Разные типы датчиков используются для определения момента, когда аналоговая величина (например, уровень, давление, температура или расход) достигает некоторого порогового значения. Поэтому их часто называют пороговыми датчиками (point sensors, limit sensors). Они обычно используются для подачи аварийного сигнала, а иногда и остановки процесса в случае достижения какой-либо величиной значения, указывающего на опасную ситуацию. Такие датчики должны быть устойчивыми и надежными.
Разные типы датчиков используются для определения момента, когда аналоговая величина (например, уровень, давление, температура или расход) достигает некоторого порогового значения. Поэтому их часто называют пороговыми датчиками (point sensors, limit sensors). Они обычно используются для подачи аварийного сигнала, а иногда и остановки процесса в случае достижения какой-либо величиной значения, указывающего на опасную ситуацию. Такие датчики должны быть устойчивыми и надежными.


 Закон внутренних температур. Наличие температурного градиента в однородном проводнике не приводит к возникновению электрического тока (никакой дополнительной ЭДС не возникает).
Закон внутренних температур. Наличие температурного градиента в однородном проводнике не приводит к возникновению электрического тока (никакой дополнительной ЭДС не возникает).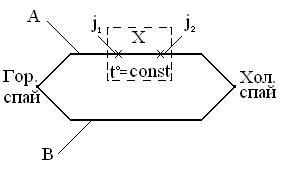 Закон промежуточных проводников. Пусть два однородных проводника из металлов А и В образуют термоэлектрическую цепь с контактами, имеющие температуры T1 (горячий спай) и T2 (холодный спай). В разрыв проводника А включается проводник из металла Х и образуется два новых контакта j1 и j2. (см. рис. 2.13.). «Если температура проводника Х одинакова по всей длине, то результирующая ЭДС термопары не изменится (от дополнительных спаев не возникает ЭДС)».
Закон промежуточных проводников. Пусть два однородных проводника из металлов А и В образуют термоэлектрическую цепь с контактами, имеющие температуры T1 (горячий спай) и T2 (холодный спай). В разрыв проводника А включается проводник из металла Х и образуется два новых контакта j1 и j2. (см. рис. 2.13.). «Если температура проводника Х одинакова по всей длине, то результирующая ЭДС термопары не изменится (от дополнительных спаев не возникает ЭДС)». а) таким образом, это позволяет спаивать, а не сваривать концы проводников;
а) таким образом, это позволяет спаивать, а не сваривать концы проводников;