|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Асинхронные и синхронные двигатели
Двигатели переменного тока (а.с. motor), как правило, применяются в тяжелых эксплуатационных условиях, однако они находят все большее распространение в системах промышленного управления, например в качестве сервомоторов. Некоторые преимущества двигателей переменного тока перечислены ниже: экономичность; надежная и простая конструкция; высокая эксплуатационная надежность; простое энергопитание; отсутствие коммутатора; практическое отсутствие дуговых явлений (поскольку нет коммутаторов). Отрицательными чертами двигателей переменного тока являются более низкий момент начала движения, чем у двигателей постоянного тока, и более сложные цепи управления. Однако преимущества систем привода переменного тока таковы, что они успешно конкурируют с двигателями постоянного тока в роботах, манипуляторах и других промышленных системах силового привода. Широкое применение двигателей переменного тока в качестве сервомоторов стало возможным по мере развития силовой электроники в сочетании с новыми методами управления. Применение микроэлектроники обеспечивает вполне приемлемое управление частотой питающего напряжения. Вращающий момент двигателя нельзя измерить так же просто, как у двигателей постоянного тока, однако существуют способы его оперативной (on-line) оценки. Из-за жестких временных требований для управления должны использоваться микропроцессоры со специальной архитектурой, обеспечивающей очень высокую скорость вычислений, - цифровые сигнальные процессоры (Digital Signal Processors — DSP). У асинхронного (индукционного) двигателя магнитное поле статора не постоянно, в отличие от двигателя постоянного тока. В простейшей (двухполюсной) машине имеются три статорные обмотки, расположенные вокруг статора под углом 120° друг относительно друга. Когда по ним подается трехфазное переменное напряжение, результирующий магнитный поток статора вращается с частотой приложенного наложения. Поскольку к обмотке ротора не подводится никакого внешнего питания (она короткозамкнута), то нет необходимости в щеточных коммутирующих устройствах. Вращающееся поле статора пересекает обмотки ротора и индуцирует в них ток. Результирующий поток ротора взаимодействует с вращающимся потоком статора и создает вращающий момент в направлении вращения поля статора. Этот момент и есть рабочий момент двигателя. Из-за потерь на трение ротор не может даже на холостом ходу достичь так называемой синхронной частоты вращения, т. е. точного значения частоты вращения поля статора. Вращающий момент образуется именно из-за разности частот вращения ротора и поля статора. Относительная разность частот вращения называется скольжением ротора (slip)
где ω s - частота вращения поля статора (синхронная частота), а ω m — частота вращеия ротора. Очевидно, что при s= 0 вращающий момент равен нулю. Ротор синхронного двигателя движется синхронно с вращающимся магнитным полем, создаваемым обмотками статора (статор синхронного двигателя в принципе такой как у асинхронного). В отличие от асинхронного, обмотки ротора синхронного двигателя возбуждаются от внешнего источника постоянного тока. Полюса возникающего магнитного поля ротора занимают фиксированное положение относительно вращающегося поля статора и вращаются вместе с ним; следовательно, скорости вращения ноля статора и ротора идентичны и скольжение равно нулю. Синхронные двигатели часто используются в тех случаях, когда необходима постоянная скорость вращения при переменной нагрузке. В сочетании с современными преобразователями частоты синхронные двигатели могут работать с переменной скоростью вращения. Большое распространение приобретают синхронные двигатели с постоянными магнитами. Шаговые двигатели можно рассматривать как специальный тип синхронного двигателя. Управляющие клапаны Управляющий клапан (control valve) состоит из тела клиновидной или цилиндрической формы (иногда называется тарелкой), закрепленного на стержне (штоке), который движется вверх и вниз относительно цилиндрического седла. Стержень обычно перемещается под давлением сжатого воздуха на поршень или диафрагму с пружиной. Пружина может либо открывать, либо закрывать клапан в зависимости от того, какое положение требуется в случае прекращения подачи сжатого воздуха. Иногда для управления потоком используется электрический или гидравлический привод. Конструкции тела и седла клапана различаются в зависимости от требований к соотношению между производительностью и потерями напора на клапане, типа жидкости и расхода при разных положениях штока. Размер клапана обычно выбирают в соответствии с параметрами трубопровода, в котором он устанавливается. Выбор формы клапана и сочетания размеров седла и тела (тарелки) требует оценки следующих факторов. Потери напора (pressure drop). Большие потери напора на клапане могут затруднить движение штока. Специальная конструкция клапана заставляет поток двигаться в противоположных направлениях через два запирающих элемента, тем самым уравновешивая силы. Необходимость снижения потерь напора может потребовать применения различных типов клапанов, например типа " бабочка" (butterfly valve). Максимальный расход (maximum flowrate). Это требование сводится к сочетанию максимального расчетного расхода с максимальной зоной управления. Последняя должна в идеале составлять 30-50 % от расчетного расхода. Иногда неопытные специалисты задают эту величину на уровне 10 %, что заметно ухудшает рабочие характеристики. Управляемость (rangeability). Это отношение расходов при двух различных положениях штока. Оно в основном связано с конструкцией тела и седла и зависимости от потерь напора от расходных характеристик, которые, в свою очередь, связаны характеристиками нагнетающего насоса. Управляемость должна обеспечивать номинальный диапазон расходов с соответствующими зонами управления (желательно 30-50 %) по обе стороны диапазона. Чувствительность (sensitivity) связана с управляемостью и величиной управляющего воздействия, необходимого для управления с заданной точностью. Иногда большой клапан обеспечивает номинальный расход, а малый, установленный параллельно, обеспечивает необходимую чувствительность. Линейность (linearity). Желательно, чтобы в контуре управления существовала линейная зависимость между выходами регулятора и датчика, т. е. в цепочке «клапан - процесс - датчик". Если контур управления не обладает линейной зависимостью выходных и входных величин, ее можно обеспечить выбором характеристик клапана, а иногда и датчика. Качество управления при отсутствии линейности и может оказаться низким, или потребуется реализация специальных способов управления. Гистерезис (hysteresis). Это обычная проблема управляющих клапанов, возникающая из-за процессов сухого трения (прилипания) в месте прилегания запорного элемента клапана к седлу, а также потерь напора на клапане. Как правило, гистерезис является причиной небольших постоянных колебаний в контуре управления, для борьбы с которыми можно применять устройства точного позиционирования клапана. Это специальное устройство управления с большим коэффициентом усиления, которое обеспечивает нужное положение штока клапана. В этом случае управляющий компьютер не осуществляет точного контроля за открытием клапана, а только вырабатывает опорные значения для устройства позиционирования клапана.
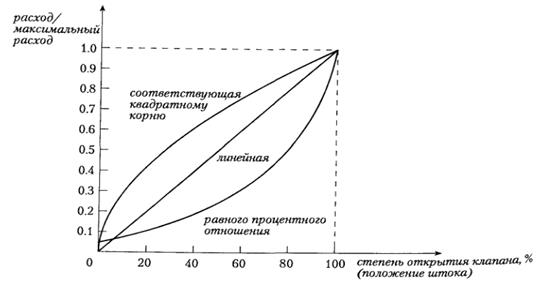
Рис. 9.2. Характеристики клапанов
Управляемость клапана можно определить на основании расчета двух расходов, равных, например, 15 и 85 % от максимального расхода. В этом случае необходим знать функцию f(х), которая характеризует клапан. Клапаны поставляются со следующими характеристиками: f(х) = х - линейная, f(х) = sqrt (x) - соответствующая квадратному корню, f(x) - А↑ (х-1) - равного процентного отношения (где конструктивная постоянная А обычно лежит в пределах от 20 до 50). Эти зависимости показаны на рис. 9.2. Следует отметить, что идеальный клапан равного процентного отношения не закрывается полностью. На практике их проектируют таким образом, чтобы получить линейную характеристику при очень малых открытиях и следовательно, они закрываются полностью.
ОБЪЕКТЫ УПРАВЛЕНИЯ
Популярное:
|
Последнее изменение этой страницы: 2016-05-03; Просмотров: 805; Нарушение авторского права страницы