|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Модуль дискретного ввода-вывода.
Для примера рассмотрим модуль ADAM4050. Содержит 7 каналов дискретного ввода и 8 каналов дискретного вывода. Данный модуль не имеет гальванической развязки, поэтому предназначен для использования совместно с дискретными модулями УСО, твердотельными реле и другими усилительными устройствами, имеющие гальваническое разделение. Логические TTL-сигналы и датчики типа «сухой контакт» могут быть подключены без гальванического разделения.
Модули коммуникационной связи.
Применяются для преобразования сигналов интерфейса RS232 в RS485. Эти модули могут содержать или не содержать устройства гальванического разделения. Они могут быть прозрачными с точки зрения протокола RS232. Это значит, что такие модули не контролируются и не обмениваются своими параметрами через интерфейс RS485, а только лишь преобразуют уровни сигнала и распознают направление передачи. Также могут быть непрозрачным, то есть иметь адрес и параметры конфигурации. Для примера рассмотрим формат кадра RS232:
Для того, чтобы повысить помехозащищенность данные передают, как правило, в виде символов американского стандартного кода. Если принято число, которое составляет символ, не предназначенный для использования в данном поле пакета информации, то пакет считается сбойным.
АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ.
Регуляторы можно строить на основе как аналоговой, так и цифровой техники. Соответственно, для анализа и проектирования аналогового и цифрового регулятора требуются разные математические методы. Хотя цифровая технология позволяет хорошо моделировать работу аналоговой системы управления, т. е. реализовать аналоговые понятия цифровыми средствами, ее возможности гораздо шире. Например можно построить нелинейные и самонастраивающиеся регуляторы, которые нельзя создать на основе только аналоговых средств. Главная проблема цифрового управления - найти соответствующую структуру регулятора и его параметры. После определения этих параметров реализация алгоритмов управления обычно представляет собой простую задачу. Помимо этого, каждый регулятор должен включать средства защиты, предотвращающие опасное развитие процесса под действием регулятора в нештатных ситуациях. Многие производственные процессы характеризуются несколькими входными и выходными параметрами. В большинстве случаев внутренние связи и взаимодействие соответствующих сигналов не имеют принципиального значения, и процессом можно управлять с помощью набора простых регуляторов, при этом каждый контур управления обрабатывает одну пару вход/выход. Такой подход используется в системах прямого цифрового управления. Типовая структурная схема регулятора Автоматический регулятор (рис. 5.1.) состоит из: ЗУ - задающего устройства, СУ - сравнивающего устройства, УПУ - усилительно-преобразующего устройства, БН - блока настроек.
Задающее устройство должно вырабатывать высоко стабильный сигнал задания (уставку регулятора), либо изменять его по определенной программе. Сравнивающее устройство позволяет сопоставлять сигнал задания с сигналом обратной связи и, тем самым, сформировать величину ошибки регулирования
Классификация регуляторов Автоматические регуляторы классифицируются по назначению, принципу действия, конструктивным особенностям, виду используемой энергии, характеру изменения регулирующего воздействия и т.п. По принципу действия они подразделяются на регуляторы прямого и непрямого действия. Регуляторы прямого действия не используют внешнюю энергию для процессов управления, а используют энергию самого объекта управления (регулируемой среды). Примером таких регуляторов являются регуляторы давления. В автоматических регуляторах непрямого действия для его работы требуется внешний источник энергии. По роду действия регуляторы делятся на непрерывные и дискретные. Дискретные регуляторы, в свою очередь, подразделяются на релейные, цифровые и импульсные. По виду используемой энергии они подразделяются на электрические (электронные), пневматические, гидравлические, механические и комбинированные. Выбор регулятора по виду используемой энергии определяется характером объекта регулирования и особенностями автоматической системы. По закону регулирования они делятся на двух- и трехпозиционные регуляторы, регуляторы с непрерывным управляющим воздействием (интегральные, пропорциональны, пропорционально-дифференциальные, пропорционально-интегральные, и пропорционально-интегрально-дифференциальные регуляторы - сокращенно И, П, ПД, ПИ и ПИД - регуляторы), регуляторы с переменной структурой, адаптивные (самонастраивающиеся) и оптимальные регуляторы. Двухпозиционные регуляторы нашли широкое распространение, благодаря своей простоте и малой стоимости. По назначению регуляторы подразделяются на специализированные (например, регуляторы уровня, давления, температуры и т.д.) и универсальные с нормированными входными и выходными сигналами и пригодные для управления различными параметрами. По виду выполняемых функций регуляторы подразделяются на регуляторы автоматической стабилизации, программные, корректирующие, регуляторы соотношения параметров и другие.
Позиционные регуляторы. Реализуются на практике с применением электронных, электромеханических, пневматических аналоговых и дискретных устройств, имеющих релейные характеристики. Позиционные регуляторы производят сравнение контролируемого параметра с сигналами задания и обеспечивают переключение управляющего воздействия на дискретные уровни, которые определяются структурой регулятора. Позиционный регулятор постоянно оказывает на объект управляющее воздействия, отличные от значений, необходимых для равновесного состояния объекта. В результате этого регулятор работает в автоколебательном режиме в окрестностях равновесного состояния. В общем случае позиционный регулятор включает в себя (см. рис. 5.2.): устройство сравнения (1);
релейный элемент (3); датчик обратной связи (4); объект регулирования (5). Приняты следующие обозначения: q1– сигнал задания; ε 0 – сигнал рассогласования; m – управляющее воздействие; q3 – регулируемый параметр.
Различают двух, трех и многопозиционные регуляторы.
Для малоинерционных объектов частота переключения может быть очень высокой, поэтому в позиционном регуляторе искусственно создают зону гистерезиса.
Характеристика трехпозиционного регулятора (см. рис.5.4.) с реверсом и зоной гистерезиса, так как есть отрицательные управляющие воздействия.
Популярное:
|
Последнее изменение этой страницы: 2016-05-03; Просмотров: 941; Нарушение авторского права страницы
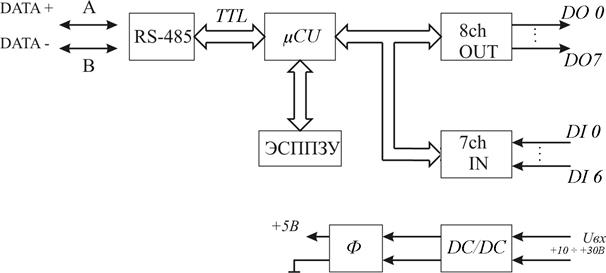
 Конвертор преобразует напряжение +10÷ +30В в +5В (DC/DC-конвертор).
Конвертор преобразует напряжение +10÷ +30В в +5В (DC/DC-конвертор).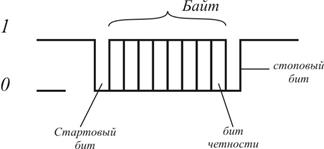
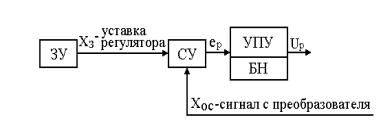
 Усилительно-преобразующее устройство состоит из блока формирования алгоритма регулирования, блока настройки параметров этого алгоритма и усилителя мощности. В промышленных регуляторах имеется также переключатель " Прямой - Обратный", с помощью которого может инвертироваться величина приращения сигнала управления. Выбор положения этого переключателя осуществляется таким образом, чтобы обеспечить отрицательную обратную связь в системе.
Усилительно-преобразующее устройство состоит из блока формирования алгоритма регулирования, блока настройки параметров этого алгоритма и усилителя мощности. В промышленных регуляторах имеется также переключатель " Прямой - Обратный", с помощью которого может инвертироваться величина приращения сигнала управления. Выбор положения этого переключателя осуществляется таким образом, чтобы обеспечить отрицательную обратную связь в системе.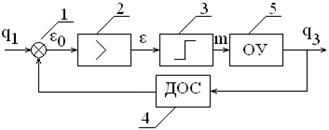 нормализатор (2);
нормализатор (2); 
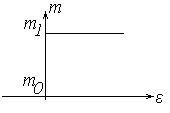 Например, для двух позиционного регулятора существуют два уровня управляющего воздействия: max – m1, нулевой – m0. (см. рис.5.3.). В зависимости от сигнала рассогласования ε, регулятор переключается в одно из состояний.
Например, для двух позиционного регулятора существуют два уровня управляющего воздействия: max – m1, нулевой – m0. (см. рис.5.3.). В зависимости от сигнала рассогласования ε, регулятор переключается в одно из состояний. Это простые и дешевые регуляторы с обратной связью, применяемые в несложных приложениях, например в термостатах отопительных систем и бытовых холодильников. Эти регуляторы используются также в простых производственных, например, в системах управления уровнем или простейших дозаторах.
Это простые и дешевые регуляторы с обратной связью, применяемые в несложных приложениях, например в термостатах отопительных систем и бытовых холодильников. Эти регуляторы используются также в простых производственных, например, в системах управления уровнем или простейших дозаторах.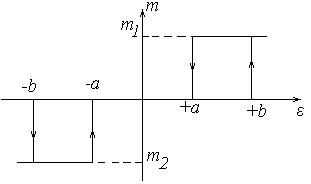 Позиционное реле вызывает колебания относительно постоянного опорного значения, поскольку управляемая переменная изменяется скачком между двумя фиксированными значениями. Это может вызвать чрезмерный износ конечного элемента системы управления, механический клапан может быстро выйти из строя; для других исполнительных механизмов, например соленоидных выключателей, подобной проблемы не возникает.
Позиционное реле вызывает колебания относительно постоянного опорного значения, поскольку управляемая переменная изменяется скачком между двумя фиксированными значениями. Это может вызвать чрезмерный износ конечного элемента системы управления, механический клапан может быстро выйти из строя; для других исполнительных механизмов, например соленоидных выключателей, подобной проблемы не возникает.