Интерполяция функции с помощью первой формулы Ньютона
Определение значения функции в точке х = 1, 1 внутри интервала с помощью первой интерполяционной формулы Ньютона.
Составим таблицу конечных разностей таблично заданной функции (таблица 2.1).
Таблица 2.1 – Конечные разности таблично заданной функции (первая формула Ньютона)
| τ ХОЛ., с
| SХОЛ., м
| 
| 
| 
| 
| 
| 
| 
|
| 0, 20
| 0, 02
| 0, 01
| 0, 07
| -0, 07
| 0, 07
| -0, 12
| 0, 27
| -0, 59
|
| 0, 40
| 0, 03
| 0, 08
| 0, 00
| 0, 00
| -0, 05
| 0, 15
| -0, 32
|
|
| 0, 60
| 0, 11
| 0, 08
| 0, 00
| -0, 05
| 0, 1
| -0, 17
|
|
|
| 0, 80
| 0, 19
| 0, 08
| -0, 05
| 0, 05
| -0, 07
|
|
|
|
| 1, 00
| 0, 27
| 0, 03
| 0, 00
| -0, 02
|
|
|
|
|
| 1, 20
| 0, 30
| 0, 03
| -0, 02
|
|
|
|
|
|
| 1, 40
| 0, 33
| 0, 01
|
|
|
|
|
|
|
| 1, 60
| 0, 34
|
|
|
|
|
|
|
|
За x0 принимаем ближайшее к искомому значение х = 1, 1, т.е. x0 = 1, 0 Так
как h = 0, 2, то  .
.
Далее записывается общий вид формулы Ньютона и её решение.

Интерполяция функции с помощью второй формулы Ньютона
Определение значения функции в точке х = 1, 1 внутри интервала с помощью второй интерполяционной формулы Ньютона.
Далее составляется таблица конечных разностей таблично заданной функции (смотри таблицу 2.1).
Примем xn = 1, 6, тогда:  .
.
Далее записывается общий вид формулы Ньютона и её решение.

Экстраполяция функции с помощью первой формулы Ньютона
Определение значение функции в точке за пределами заданного интервала (аппроксимация назад) вблизи начального значения интервала x0, т.е. х < x0.
Далее составляется таблица конечных разностей таблично заданной функции (смотри таблицу 2.1).
За x0 принимаем ближайшее к искомому значение х = 0, 19, 0, т.е. x0 = 0, 2. Так как h = 0, 2, то  .
.
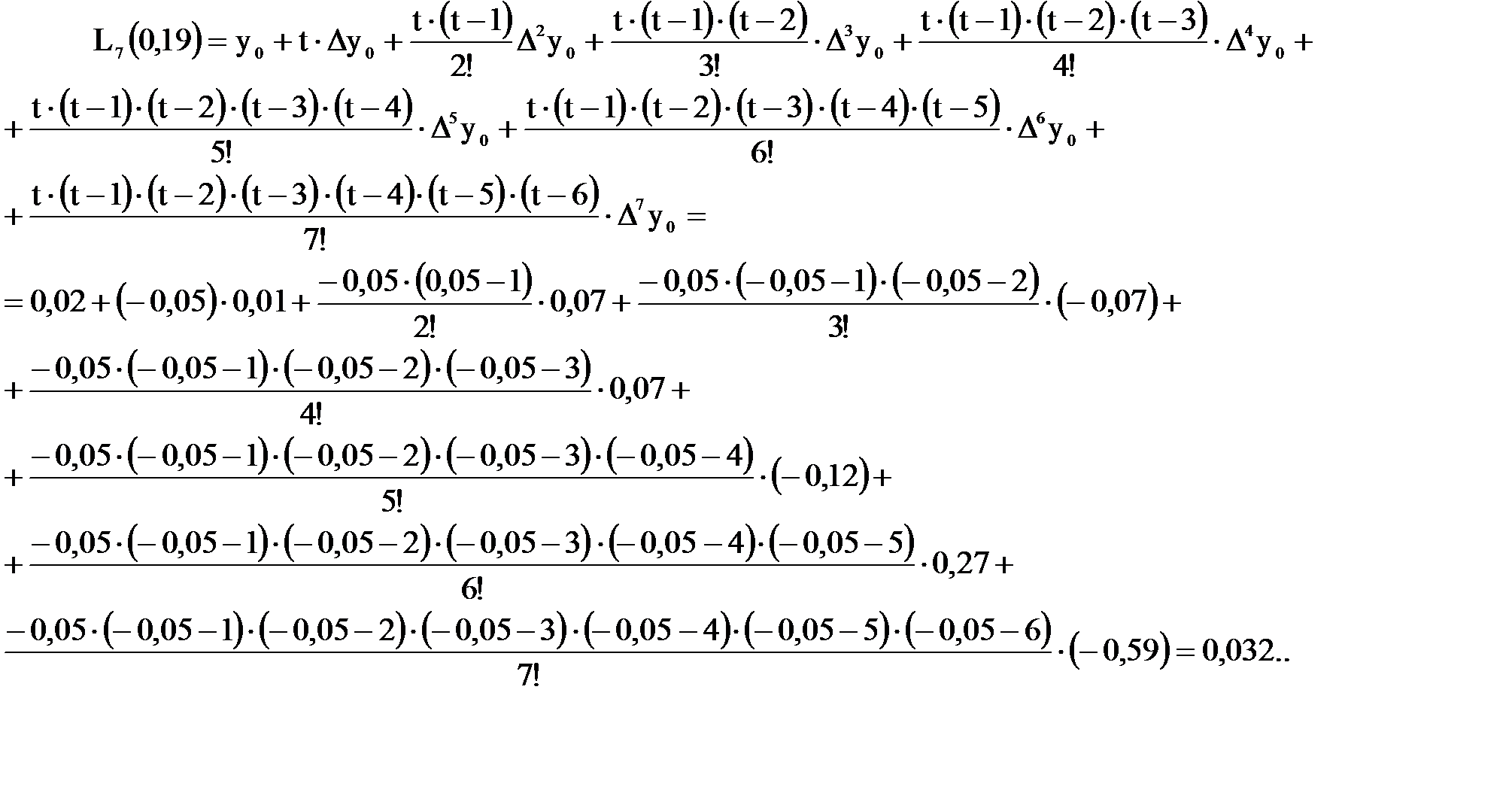
Далее записывается общий вид формулы Ньютона и её решение.
Экстраполяция функции с помощью второй формулы Ньютона
Определение значение функции в точке за пределами заданного интервала вблизи конечного значения интервала xn, т.е. х > xn.
Далее составляется таблица конечных разностей таблично заданной функции (смотри таблицу 2.1).
Примем xn = 4, 0, тогда:  .
.
Далее записывается общий вид формулы Ньютона и её решение.
2.2.6 Аппроксимация функции методом неопределённых
коэффициентов
Аппроксимация функции полиномом 2-й степени по трём точкам (x0, x1, x4) методом неопределённых коэффициентов.
Система алгебраических уравнений с тремя неизвестными а0, а1, а2 примет вид:
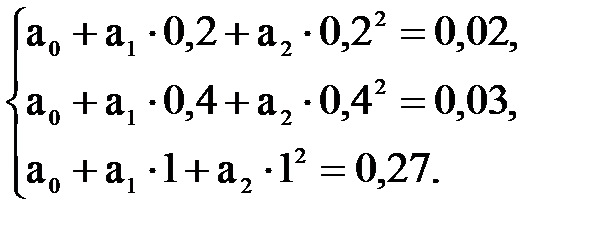
В матричной форме данная система будет выглядеть так:
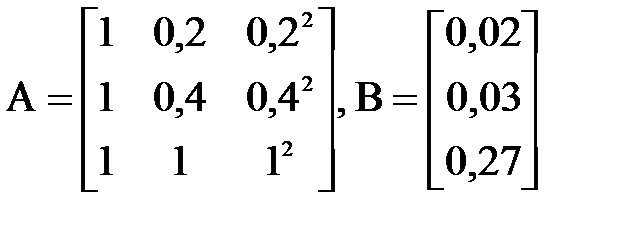 .
.
Определитель матрицы А находится следующим образом:

Если detА ≠ 0, то для матрицы А существует обратнаяматрица.
Присоединённая матрица А* к матрице А находится следующим образом:

Необходимо заметить, что в присоединённой матрице элементы, сумма коэффициентов которых равна нечётному числу, меняют свой знак на противоположный (с21, с12, с32, с23).
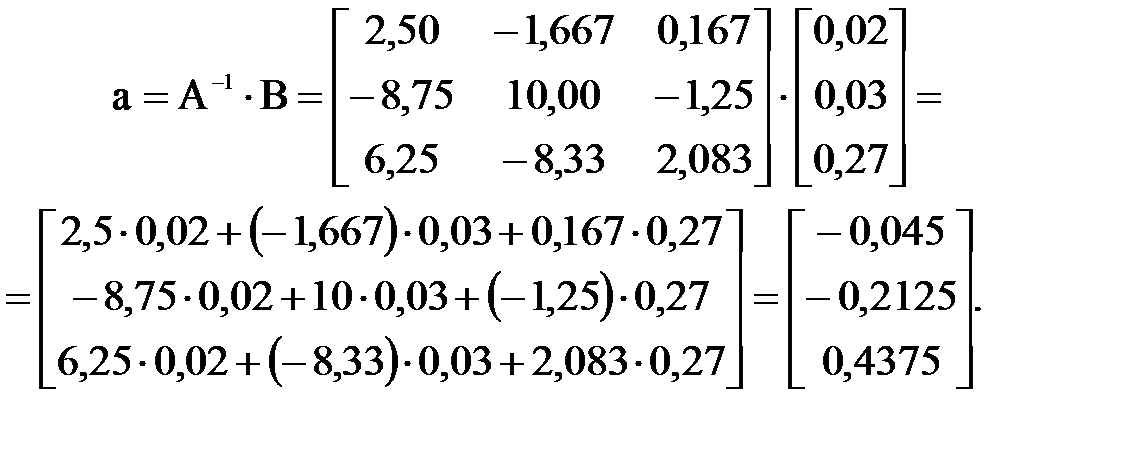
Далее находится обратная матрица А-1:

Далее по формуле (2.51) находятся искомые значения функции.
Аппроксимация функции методом наименьших квадратов
Аппроксимация функции полиномом 1-й степени по шести точкам методом наименьших квадратов.
Список литературы
1. Леушин, И.О. Лабораторный практикум по методам математического моделирования: Учебное пособие/ И.О. Леушин. — Н.Новгород: Изд-во «НГТУ», 2007. — 122 с.
2. Леушин, И.О. Моделирование процессов и объектов в металлургии: учебник для студентов вузов/ И.О. Леушин. — Н.Новгород: Изд-во «НГТУ им. Р.Е. Алексеева», 2010. — 181 с.
3. Леушин, И.О. Математическая обработка результатов экспериментов: методические указания к выполнению расчётно-графической работы/ И.О. Леушин, В.А. Решетов. — Н.Новгород: Изд-во «НГТУ», 2001. — 35 с.
Приложение А
(обязательное)
Листинг программы, реализованной в среде MathCAD
| Лабораторная работа №2
Приёмы вторичной математической обработки данных
Вариант №
Группа:
ФИО студента:
Задание:
1) провести интерполяцию функции, заданной выборками Ах и Ву, различными способами и определить значения функции в двух точках внутри интервала;
2) провести экстраполяцию заданной функции с применением функции предсказания в пяти точках правее интервала;
3) оценить степень парной корреляции данных выборок Ах и Ву;
4) провести аппроксимацию заданной функции различными способами;
5) провести фильтрацию данных выборок Ах и Ву.
Исходные данные:
|
| Расположение точек заданной функции в поле хОу
|
| Линейная интерполяция заданной функции
|
| Значения функции в двух точках внутри интервала
|
| Интерполяция заданной функции линейными сплайнами
|
| Значения функции в двух точках внутри интервала
|
| Интерполяция заданной функции квадратичными сплайнами
|
| Значения функции в двух точках внутри интервала
|
| Интерполяция заданной функции кубическими сплайнами
|
| Значения функции в двух точках внутри интервала
|
| Эксраполяция заданной функции функцией предсказания
|
| < = Количество значений выборки Ву, по которым проводится экстраполяция
|
| < = Количество точек для экстраполяции за пределами интервала
|
| < = Значения функции в пяти точках справа от интервала
|
| Оценка степени парной корреляции данных выборок Ах и Ву
|
| Такое значение коэффициента парной корреляции свидетельствует о том, что связь между элементами выборок Ах и Ву близка к функциональной.
Аппроксимация заданной функции полиномом 2-й степени прямым применением метода наименьших квадратов
|
| Аппроксимация заданной функции полиномом 4-й степени прямым применением метода наименьших квадратов
|
| Линейная регрессия данных выборок Ах и Ву
|
| Линейная регрессия методом наименьших квадратов
|
| Вычисление коэффициентов полинома
|
| Вычисление коэффициентов полинома
|
| Линейная регрессия медтан-медианным методом
|
| Вычисление коэффициентов полинома
|
| Полиномиальная регрессия данных выборок Ах и Ву
|
| Полиномиальная регрессия естественным аппроксимирующим полиномом 4-й степени
|
| Полиномиальная регрессия участками квадратичных полиномов
|
| Регрессия единственной аппроксимирующей логарифмической функцией
|
| Аппроксимация заданной функции методом линейной регрессии общего вида
Задание линейной комбинации функции
|
| Аппроксимация заданной функции методом нелинейной регрессии общего вида
Задание вида функции
Первый элемент содержит приближающую функцию, остальные - её частные производные по параметрам
|
| Фильтрация данных
Сглаживание заданной функции адаптивным методом
|
| Сглаживание функции методом бегущих медиан
|
| Сглаживание функции методом Гаусса
|
| Устранение тренда методом суперпозиции
|
Популярное:






































































































