|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
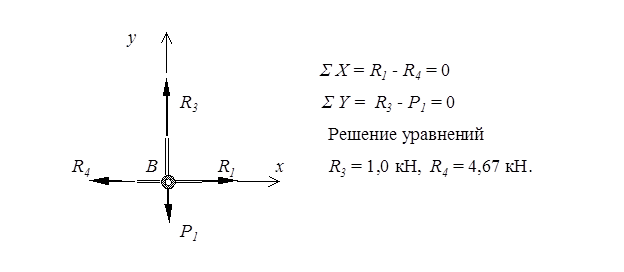
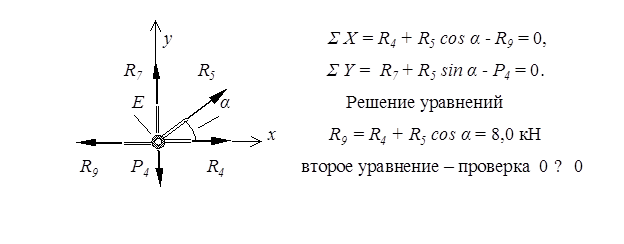
Расчетная схема и уравнения равновесия узла В ⇐ ПредыдущаяСтр 2 из 2
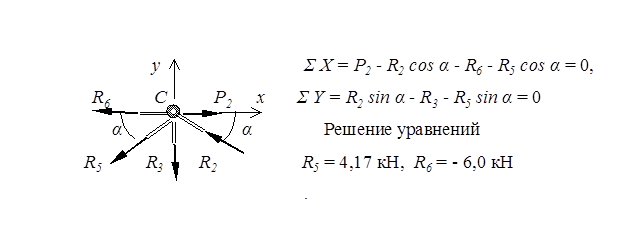
Расчетная схема и уравнения равновесия узла С
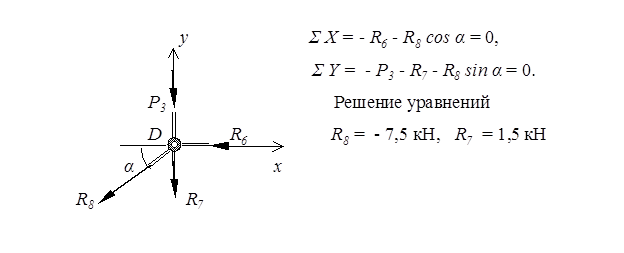
Расчетная схема и уравнения равновесия узла D
Расчетная схема и уравнения равновесия узла E
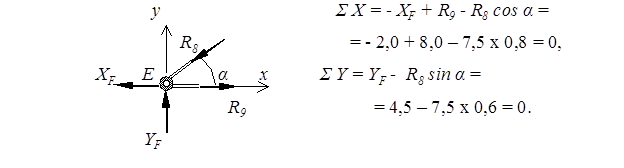
Проверка равновесия узла F
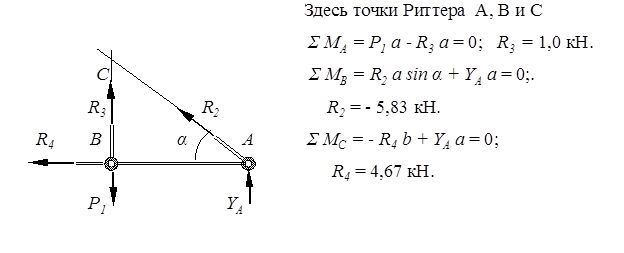
Определение усилий в стержнях методом сечений При определении усилий этим методом следует действовать наиболее рационально, т.е. выбирать такие уравнения равновесия, в каждом из которых содержится только одно неизвестное усилие. Это достигается путем определения так называемых точек Риттера. Точка Риттера – это точка пересечения двух неизвестных усилий.
Сечение по стержням 2, 3 и 4
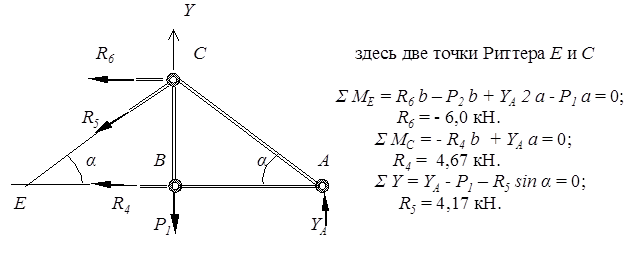
Сечение по стержням 4, 5 и 6
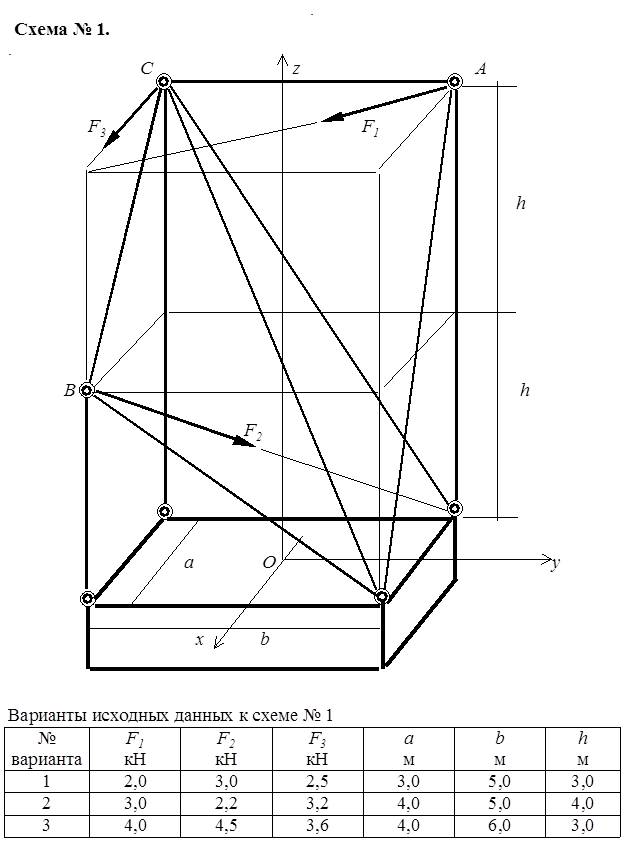
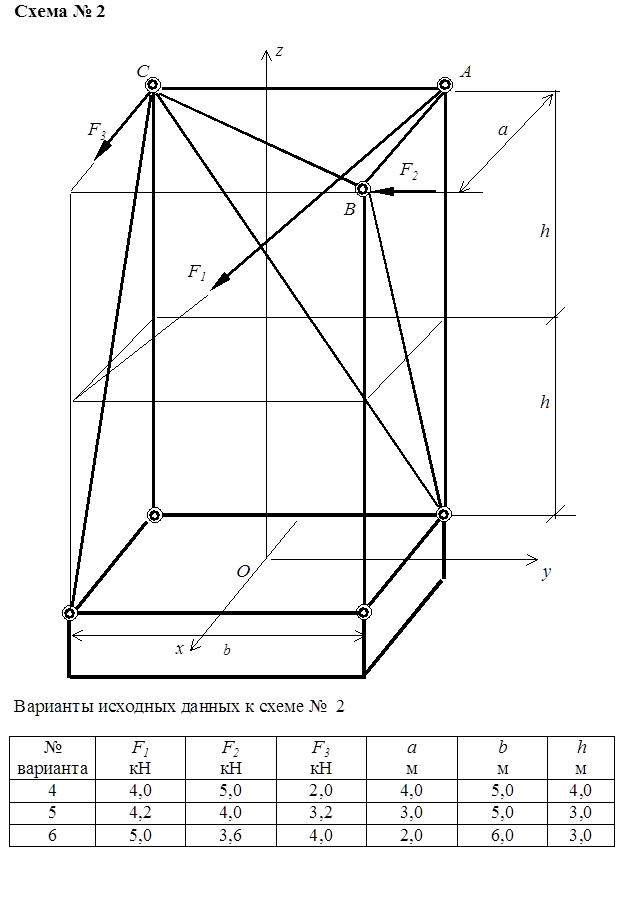
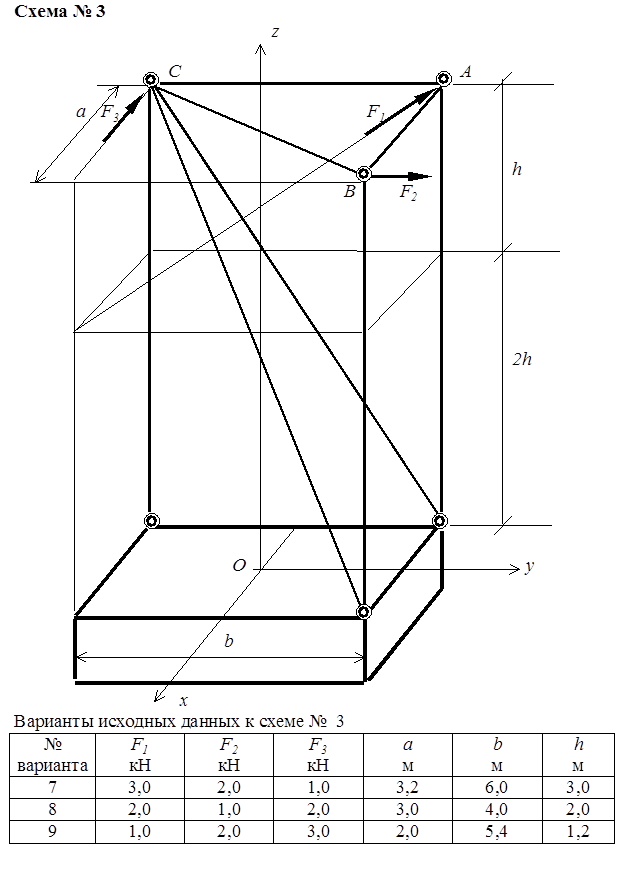
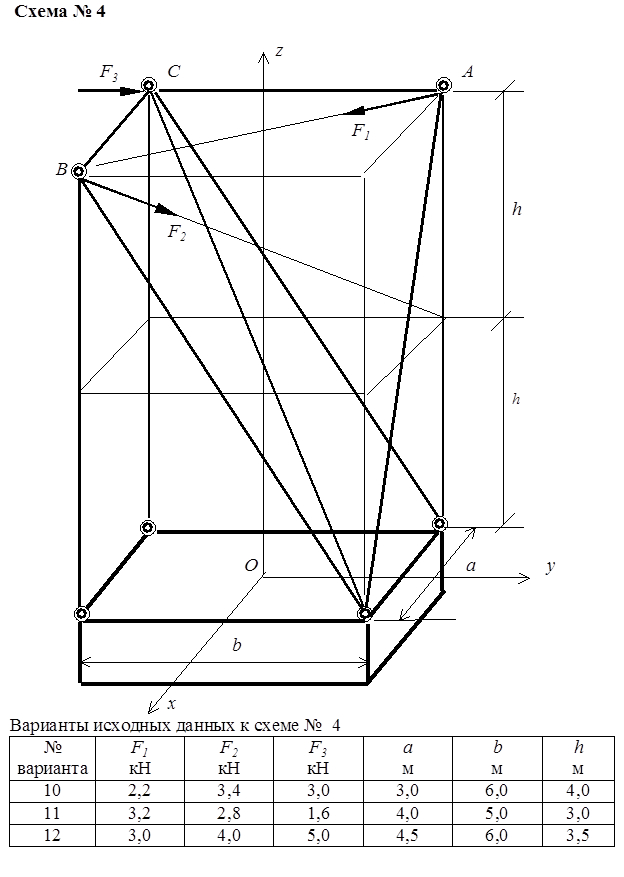
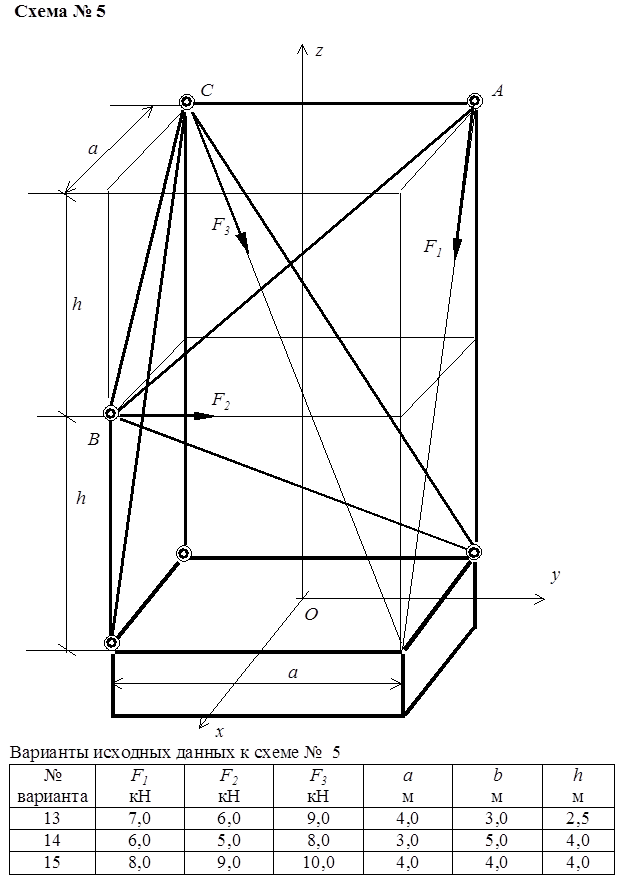
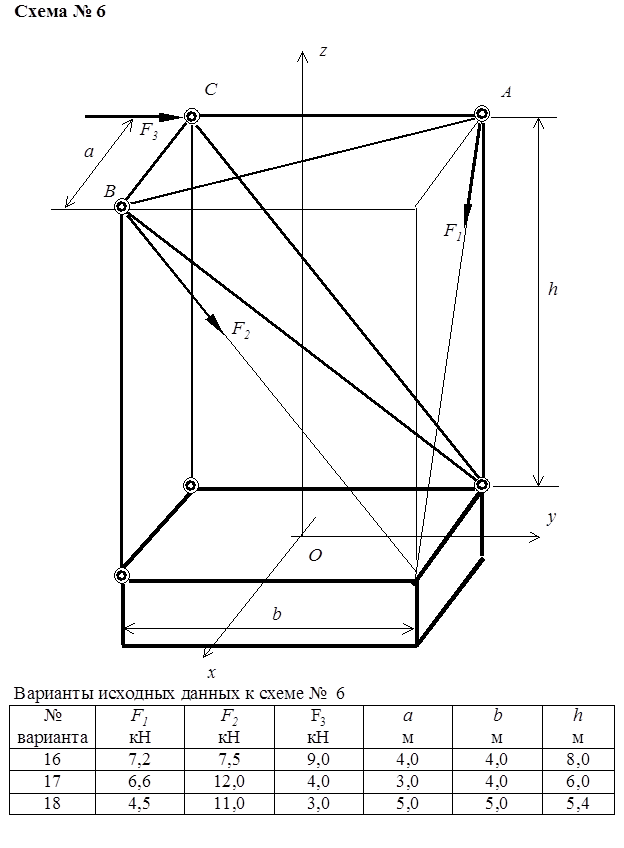
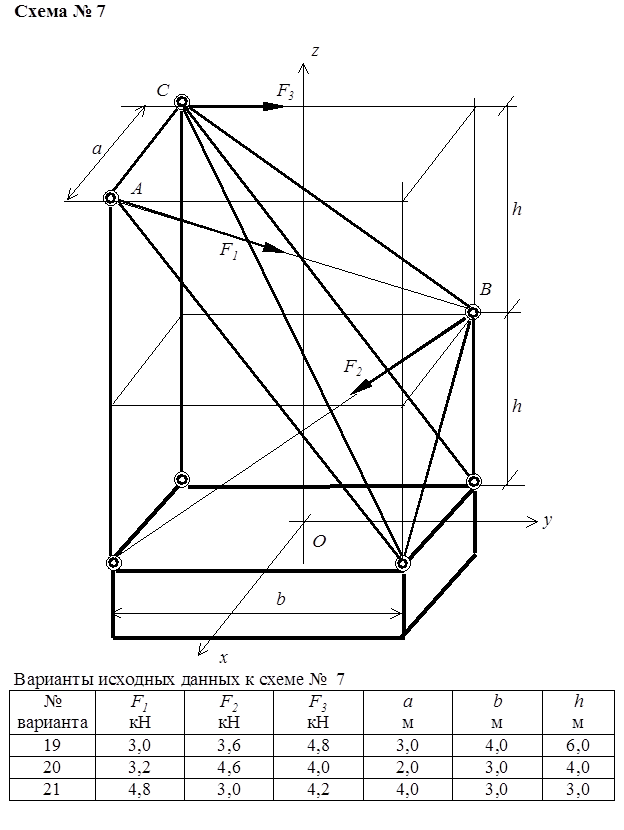
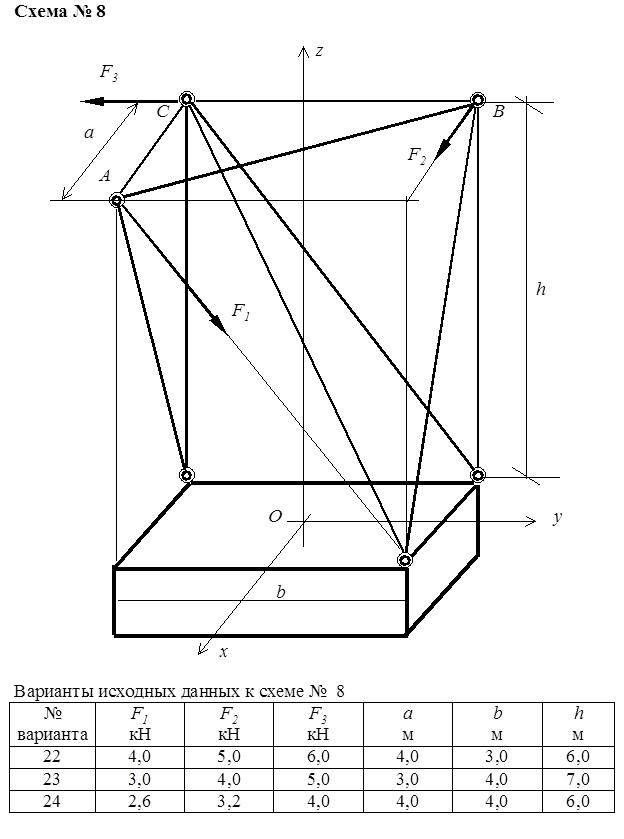
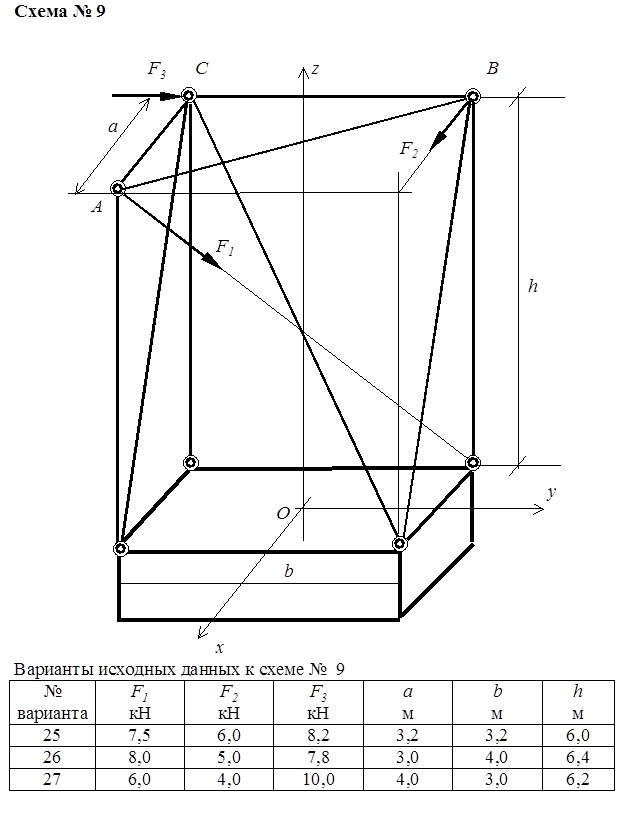
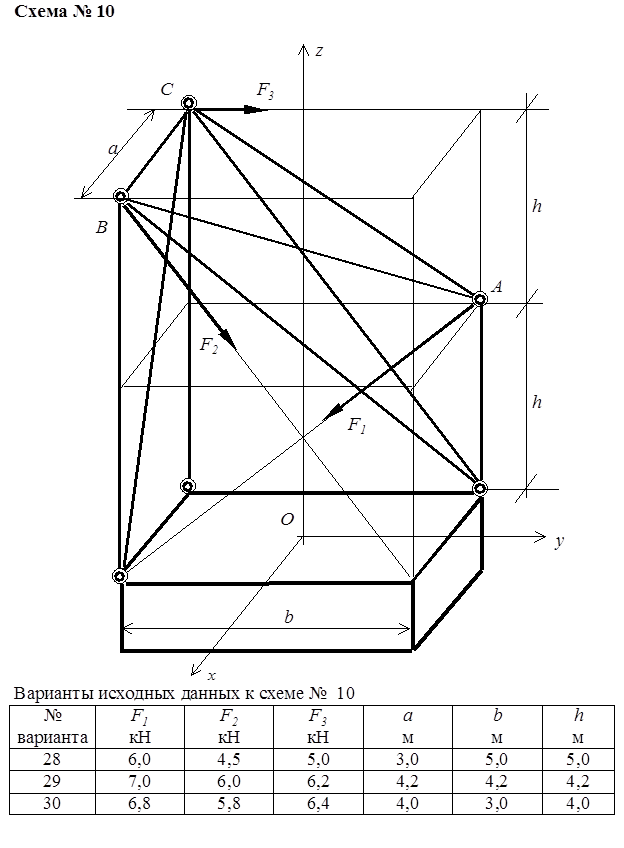
Сравнивая значения усилий, полученные двумя разными методами, убеждаемся в правильности выполненных вычислений. Расчетно-графическая работа № 2 Работа представляет собой статический расчет стержневой пространственной конструкции, шарнирно закрепленной на монолитном фундаменте. Стержни связаны между собой также идеальными сферическими шарнирами. Состав задания Схемы конструкций и варианты заданий
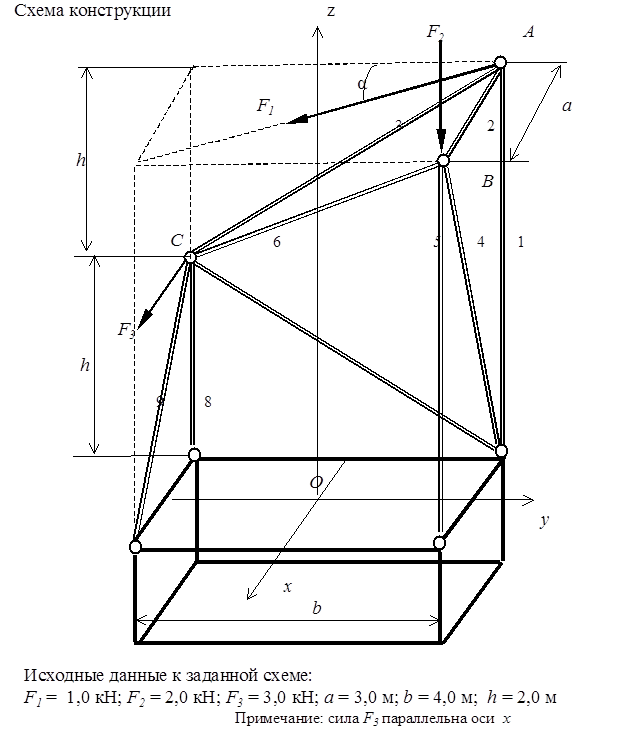
Пример выполнения расчетно-графической работы № 2 Работа представляет собой статический расчет пространственной стержневой конструкции, опирающейся на монолитный фундамент с помощью сферических шарниров. Определяются усилия во всех стержнях конструкции методом вырезания узлов. Кроме того, выясняется общее силовое воздействие на фундамент со стороны стержневой конструкции путем приведения системы сил к заданному центру О на верхней поверхности фундамента.
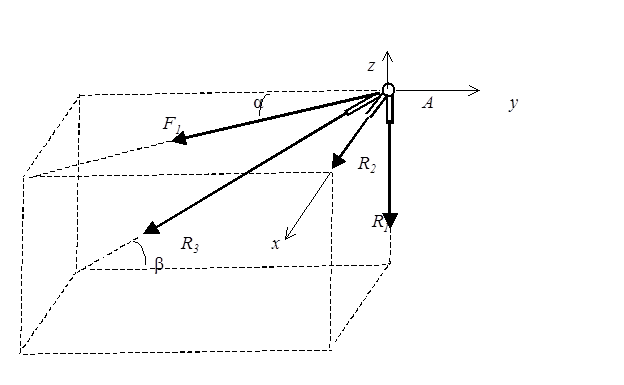
Расчетная схема узла А
Уравнения равновесия 3.Σ Z = - R1 - R3 sin β = 0. При значениях функций sin α =0, 6; cos α = 0, 8; sin β = 0, 447; cos β = 0, 895 из уравнений найдем R2 = - 0, 6 кН, R3 = - 0, 894 кН, R1 = 0, 4 кН.
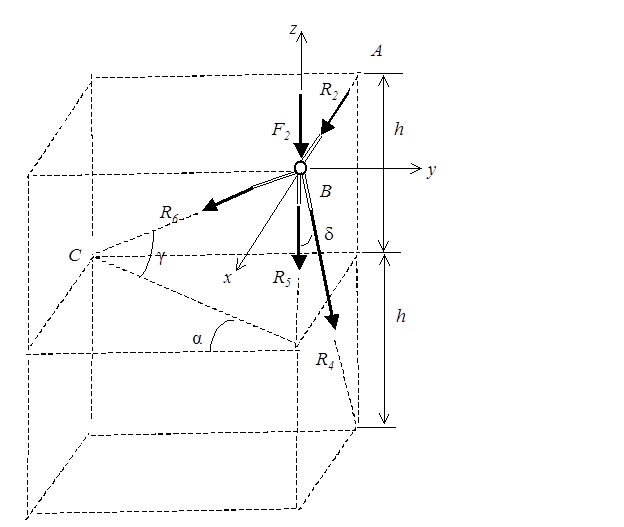
Расчетная схема узла В
Уравнения равновесия 4. Σ X = R2 - R4 sin δ - R6 cos γ sin α = 0; 5.Σ Y = - R6 cos γ cos α = 0; 6.Σ Z = - F2 - R5 - R4 cos δ - R6 sin γ = 0. Значения функций sin γ = 0, 37; cos γ = 0, 93; sin δ = 0, 6; cos δ = 0, 8. Результаты решения уравнений R6 = 0, R4 = 1, 0 кН, R5 = - 2, 8 кН
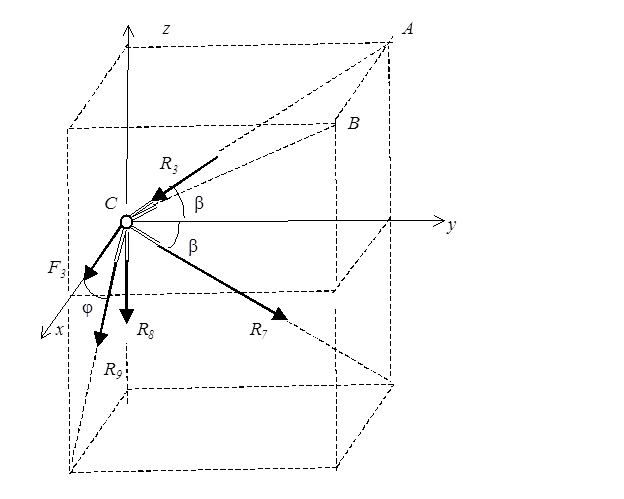
Расчетная схема узла С
Уравнения равновесия 7. Σ X = F3 + R9 cos φ = 0, 8. Σ Y = R7 cos β - R3 cos β = 0,
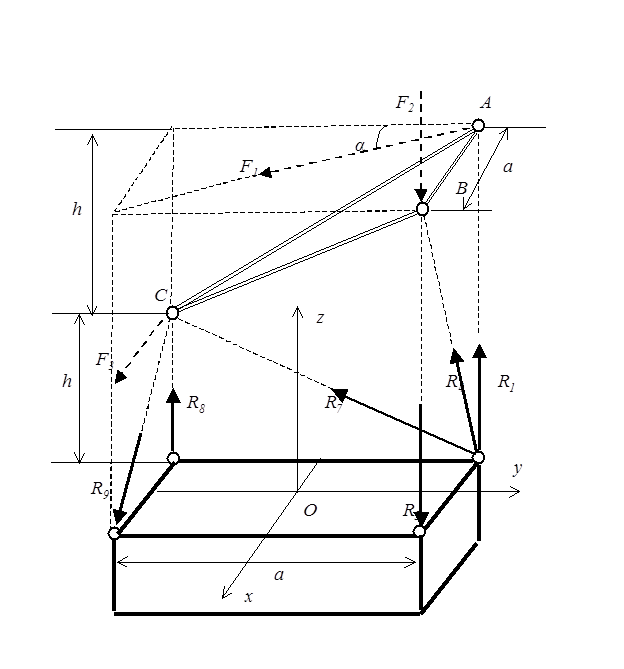
Рассмотрим систему сил, действующих на фундамент со стороны стержней. При этом следует реакции растянутых стержней направлять «от узла», расположенного на фундаменте, а сжатых стержней «к узлу».
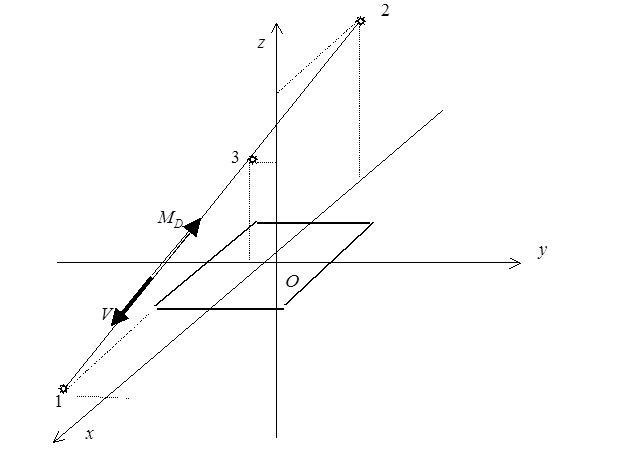
Приведем эту систему сил к заданному центру О на поверхности фундамента.Проекции главного вектора V на оси координат
Vx = Σ X = R9 cos φ + R4 sin δ = 3, 6 кН; Vy = Σ Y = - R7 cos β = - 0, 8 кН; Vz = Σ Z = R1 + R4 cos δ – R5 + R7 sin β + R8 – R9 sin φ = - 2, 0 кН Величина главного вектора V = Проекции главного момента Mo Mox = Σ Mx = R1 0, 5 b + R4 cos δ 0, 5 b – R5 0, 5 b + R7 sin β 0, 5 b – R8 0, 5 b + Moy = Σ My = R1 0, 5 a+ R4 cos δ 0, 5 + R7 sin β 0, 5 a + R8 0, 5 a + R9 sin φ 0, 5 a + R5 0, 5 a =11, 4 кНм Moz = Σ Mz = - R4 sin δ 0, 5 b + R7 cos β 0, 5 a + R9 cos φ 0, 5 b = 6, 0 кНм Величина главного момента Mo =
Для проверки выполненных расчетов найдем проекции главного вектора и главного момента для системы заданных сил F1, , F2 и F3 Vx = Σ X = 3, 6 кН; Vy = Σ Y = = - 0, 8 кН; Vz = Σ Z = - 2, 0 кН Mox = Σ Mx = F1 cos α 2h – F2 0, 5b = - 0, 8 кНм Moy = Σ My = F3 h + F1 sin α 2h + F2 0, 5 a = 11, 4 кНм Moz = Σ Mz = F3 0, 5b = 3, 0 x 2, 0 = 6, 0 кНм Результаты совпадают, следовательно, расчеты выполнены правильно. Определим, к какому простейшему виду приводится система сил. Так как V ≠ 0 и Mo ≠ 0, то система сил приводится либо к равнодействующей, либо к «динаме» - силовому винту. Найдем скалярное произведение главного момента и главного вектора Mo V cos (Mo^V) = Mx Vx + My Vy + Mz Vz Главный момент и главный вектор не перпендикулярны друг другу, следовательно система сил приводится к динаме. Моментом динамы MD называется проекция главного момента на линию действия главного вектора, поэтому MD можно найти по формуле MD = (Mox Vx + Moy Vy + Moz Vz) / V = -24 / 4, 2 = -5, 72 кНм Знак минус означает, что вектор MD направлен противоположно вектору V. Расположение центральной оси системы определим, исходя из того, что векторы MD и V расположены на этой оси и их одноименные проекции пропорциональны, т.е. [Mx – (y Vz – z Vy)] / Vx = [My – (z Vx – x Vz)] / Vy = = [Mz – (x Vy – y Vx)] / Vz = MD / V, где x, y и z - координаты точек, расположенных на центральной оси. Для определения координат x1 и y1 точки 1 пересечения центральной оси с плоскостью хОу выберем следующие два равенства [Mx – (y1 Vz – z1 Vy)] / Vx = MD / V, [My – (z1 Vx – x1 Vz )] / Vy = MD / V, где положим z1 = 0. { - 0, 8 – [ y1 ( - 2, 0 ) – z1 ( - 0, 8 ) ] } / 3, 6 = ( - 5, 72) / 4, 2; y1 = - 2, 05 м { 11, 4 – [ z1 3, 6 – x1 ( - 2, 0 ) ] } / ( - 0, 8 ) = ( - 5, 72) / 4, 2; x1 = 5, 15 м Аналогично определим координаты z2 и x2 точки 2 пересечения центральной оси с плоскостью xOz при y2 = 0 [Mx – (y2 Vz – z2 Vy)] / Vx = MD / V, [Mz – (x2 Vy – y2 Vx)] / Vy = MD / V, { - 0, 8 – [ y2 ( - 2, 0 ) – z2 ( - 0, 8 ) ] } / 3, 6 = ( - 5, 72) / 4, 2; z2 = 5, 12 м { 6, 0 – [ x2 ( - 0, 8 ) – y2 3, 6 ) ] } / ( - 2, 0 ) = ( - 5, 72) / 4, 2; x2 = - 4, 1 м Координаты z3 и y3 точки 3 пересечения центральной оси с плоскостью zОу ( x3 = 0) [My – (z3 Vx – x3 Vz)] / Vy = MD / V, [Mz – (x3 Vy – y3 Vx)] / Vy = MD / V { 11, 4 – [ z3 3, 6 – x3 ( - 2, 0 ) ] } / ( - 0, 8 ) = ( - 5, 72) / 4, 2; z3 = 2, 86 м { 6, 0 – [ x3 ( - 0, 8 ) – y3 3, 6 ) ] } / ( - 2, 0 ) = ( - 5, 72) / 4, 2; y3 = - 0, 91 м
Рекомендуемая литература
1. Яблонский А. А. Курс теоретической механики / А. А. Яблонский, В. М. Никифоров. – М.: Высшая школа, 2010. 2. Тарг С. М. Краткий курс теоретической механики / С. М. Тарг. – М.: Физматгиз, 2006. 3. Бутенин Н. В. Курс теоретической механики. / Н. В. Бутенин, Я. Л. Лунц,. – М.: Физматгиз, 1970. 4. Бать М. И., Теоретическая механика в примерах и задачах / М. И. Бать., Г. Ю Джанелидзе., А. С. Кельзон: – М.: Физматгиз, 2013. 5. Добронравов В. В. Курс теоретической механики / В. В Добронравов., Н. Н. Никитин – М.: Высшая школа, 1983.
Оглавление Введение ………… Расчетно-графическая работа №1……. Пример выполнения расчетно-графической работы № 1……. Расчетно-графическая работа № 2……. Пример выполнения расчетно-графической работы № 2…… Рекомендуемая литература……
Учебное издание
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
Методические указания к заданиям по выполнению курсовых работ и примеры их выполнения
(СТАТИКА)
Составители: Колосов Владислав Петрович. Подбелло Александр Михайлович.
Редактор В.А. Преснова. Корректор М. А. Молчанова. Компьютерная верстка И.А. Яблоковой
Подписано к печати Формат Бум. Офсетная. Усл. печ. Тираж Заказ Санкт-Петербургский государственный архитектурно – строительный университет
190005, Санкт-Петербург, 2-я Красноармейская ул., д.4. Отпечатано на ризографе.190005, 2-я Красноармейская ул., д.5.
Популярное:
|
Последнее изменение этой страницы: 2016-05-28; Просмотров: 923; Нарушение авторского права страницы
 = 4, 2 кН
= 4, 2 кН = 12, 9 кНм
= 12, 9 кНм