
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Лабораторных и расчетно-графических работСтр 1 из 8Следующая ⇒
Гладков Г.Л. Журавлев М.В.
ВОДНЫЕ ИЗЫСКАНИЯ Учебно-методическое пособие по выполнению Лабораторных и расчетно-графических работ
Санкт-Петербург
Рецензент: Кандидат технических наук, доцент Санкт-Петербургского государственного университета – Зернов А.В.
Гладков Г.Л., Журавлев М.В. Водные изыскания: Учебно-методическое пособие по выполнению лабораторных и практических работ – СПб, СПГУВК, 2009. – 66 с. Содержат описание гидрометрических приборов, используемых при проведении водных изысканий, а также методику и порядок выполнения лабораторных и практических работ по дисциплине “Водные изыскания” и “Водные исследования”. Предназначены для студентов II и III курса очного отделения, обучающихся на гидротехническом факультете по специальности 270104.65 “Гидротехническое строительство” и 280302.65 “Комплексное использование и охрана водных ресурсов”.
ã «Санкт-Петербургский государственный университет водных коммуникаций», 2009 ã Журавлев М.В., 2009 ВВЕДЕНИЕ
В учебно-методическом пособии описываются устройства, приемы и условия эксплуатации гидрометрических приборов и вспомогательного оборудования. Излагается содержание и порядок выполнения лабораторных и практических работ по дисциплине “Водные изыскания” и “Водные исследования”. Целью выполнения лабораторных работ является изучение гидрометрических приборов и приобретение первичных навыков работы с ними. Полученные навыки работы с приборами и гидрометрическим оборудованием студенты закрепляют во время прохождения учебной практики на геобазе СПГУВК. Практические работы включают выполнение расчетно-графических работ. В пособии приведен состав исходных данных и последовательность их выполнения. Исходные данные выдаются каждому студенту индивидуально. Каждая расчетно-графическая работа оформляется в виде пояснительной записки в соответствии с требованиями ЕСКД и должна содержать необходимые расчеты и графические материалы. Текст записки должен быть написан на листах бумаги формата 210× 297 мм. При выполнении расчетов выписываются все формулы, приводится расшифровка использующихся в них символов с указанием размерности и даются необходимые пояснения. Все чертежи и графики должны выполняться карандашом на миллиметровой бумаге форматов 210× 297 или 420× 297 мм с соблюдением требований ЕСКД, указанием названия, масштаба и всех необходимых размеров и обозначений. Гидрометрические вертушки Вертушка ГР-21М Вертушка ГР-21М (рис. 4) состоит из корпуса, хвостового оперения (стабилизатора), лопастного приспособления (ходовая часть и лопастной винт), сигнального устройства.
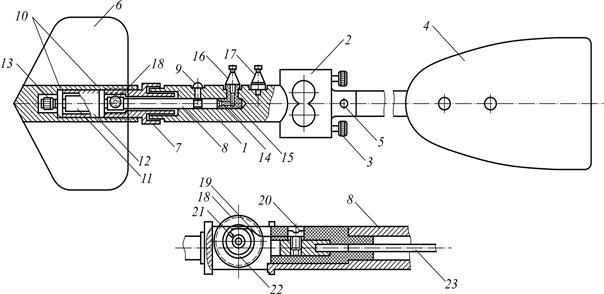
Рис. 4. Общий вид вертушки ГР-21М в разрезе: 1 – корпус; 2 – втулка для крепления вертушки на штанге или вертлюге; 3 – зажимной винт; 4 – стабилизатор; 5 – винт крепления стабилизатора; 6 – лопастной винт; 7 – муфта; 8 – ось вертушки; 9 – стопорный винт; 10 – шарикоподшипник; 11 – распорная втулка; 12 – наружная втулка; 13 – осевая гайка; 14 – штепсель; 15 – штепсельное гнездо; 16, 17 – клеммы; 18 – червячная шестерня; 19 – контактная пружина; 20 – винт; 21 – контактный штифт; 22 – диск; 23 – токопроводный стержень
Корпус служит для сочленения частей, крепления прибора на штанге или вертлюге и для подключения сигнальной цепи. В полость передней части корпуса вставляется ось ходовой части и крепится в ней стопорным винтом. В задней части корпуса имеется утолщение для крепления вертушки к штанге или тросу. В средней части расположены две клеммы, к которым подводятся сигнальные провода. Лопастное приспособление вертушки состоит из неподвижной оси, двух радиально-упорных шарикоподшипников, внутренней и внешней распорной втулки, соединительной муфты с внутренней червячной нарезкой, лопастного винта, контактной камеры (полость на оси вертушки, в которой на одной оси посажены зубчатая шестеренка и эбонитовый диск – “контактный механизм”). Контактный механизм собран из червячной шестерни с двадцатью зубцами, эбонитового диска, контактного штифта и контактной пружины, винта для ее крепления, электропроводного стержня, изолированного от массы корпуса и соединяющего контактную пружину с гнездом штепселя. Механизм дает одно замыкание электрической сигнальной цепи за один оборот червячной шестерни, что соответствует 20 оборотам лопастного винта. Сигнальное устройство (рис. 5), состоящее из клеммной панели, звонка, электрической лампочки, переключателя и сигнальных проводов, служит для преобразования электрического импульса в звуковой или световой сигнал. Вертушка работает следующим образом. Ось вертушки неподвижна. Она закреплена к корпусу винтом 9. Лопастной винт 6 под действием набегающего потока вращается вокруг неподвижной оси в шарикоподшипниках 10. Соединительная муфта 7, ввинченная в лопасть вращается вместе с ним. Вращение винта через червячную нарезку на внутренней поверхности муфты передается зубчатой шестерни 18. Ось зубчатой шестерни закреплена в контактной камере (полость на оси вращения). На одну ось с шестерней посажен эбонитовый диск 22. В канавке диска расположен контактный штифт 21. В канавку укладывается конец контактной пружины 19. Другой конец пружины с помощью винта 20 крепится к изолированному от массы электропроводному стержню 23, который расположен внутри оси вращения вертушки. Стержень оканчивается штепсельным штифтом 14,
Рис. 5. Общий вид вертушки ГР-21М
который входит в штепсельное гнездо корпуса 15. Электрический ток от отрицательного полюса батареи подводится к клемме со знаком минус (-) на клеммной панели ящика и далее по проводу к изолированной клемме вертушки 16, затем к штепсельному гнезду, по электропроводному стержню, по контактной пружине на контактный штифт и на массовую клемму 17. Далее по второму проводу ток идет на клемму панели со знаком плюс (+), от которой через звонок или лапочку – к положительному полюсу батареи. Замыкание электрической цепи происходит в момент касания контактной пружины с контактным штифтом через один полный оборот зубчатой шестерни, что соответствует 20 оборотам лопастного винта. Замыкание цепи фиксируется звонком или лампочкой. Существенный недостаток вертушки ГР-21 – сравнительно большой интервал между сигналами (20 оборотов), что не позволяет использовать их для исследования пульсации скоростей и ускоренных измерений расходов воды. Вертушка ГР-99 Вертушка ГР-99 (рис. 6) состоит из корпуса, ходовой части и контактного устройства. Ходовая часть размещена в передней части корпуса и представляет собой трехлопастной винт, установленный на оси и закрепленные гайкой два шарикоподшипника, распорную втулку, гильзу. Ходовая часть крепится к корпусу винтом.
Рис. 6. Общий вид вертушки ГР-99 (в разрезе) 1 – гайка; 2 – трехлопастной винт; 3 – радиальные шарикоподшипники; 4 – ось; 5 – винт для крепления ходовой части к корпусу; 6 – изоляционная втулка; 7 – изолированная клемма; 8 – массовая клемма; 9 – втулка для крепления вертушки на штанге или вертлюге; 10 – зажимной винт; 11 – винт крепления изоляционной втулки; 12 – магнитоуправляемый контакт; 13 – обойма; 14 – постоянный магнит; 15 – гайка; 16 – гильза; 17 – распорная втулка
Главная особенность вертушки заключается в контактном устройстве. Оно состоит из постоянного магнита, закрепленного в обойме на оси ходовой части, и магнитоуправляемого контакта, размещенного в изоляционной втулке, закрепленной в корпусе вертушки. Постоянный магнит при каждом обороте лопастного винта вызывает одно замыкание магнитоуправляемого контакта. В электрическую цепь включен счетно-импульсный механизм, который служит для суммирования электрических импульсов, поступающих от контактного устройства вертушки, и регистрации выдержки времени. Он состоит из электромагнитного счетчика импульсов, стандартного секундомера и рычажного устройства, обеспечивающего синхронное включение и выключение счетчика и секундомера (рис. 7).
Рис. 7. Общий вид вертушки ГР-99
Для подключения сигнальной линии служат две клеммы, расположенные на корпусе, одна из которых изолирована, а другая связана с массой корпуса вертушки. Вертушка крепится к штанге двумя винтами, расположенными в тыльной части корпуса. Для работы на тросе вертушка укомплектована вертлюгом и хвостовым оперением.
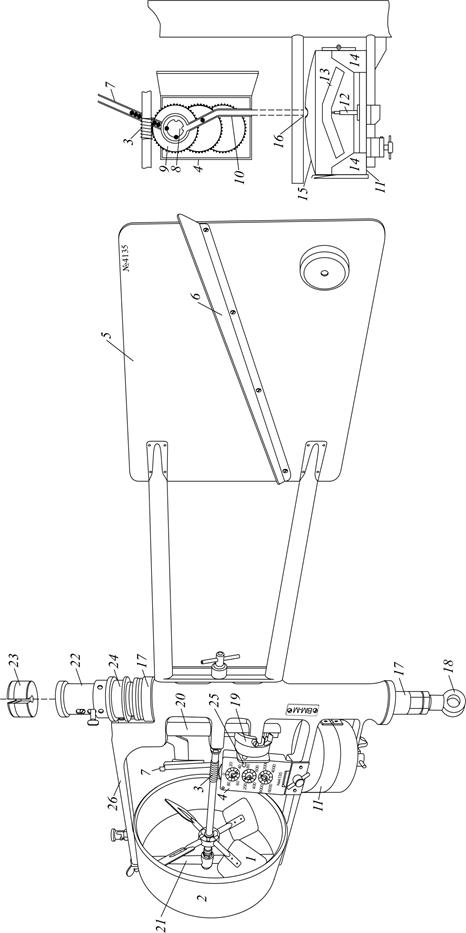
Вертушка морская ВМ-М Вертушка морская ВМ-М (рис. 8) состоит из следующих основных частей: 1) литой рамы с вертикальной осью подвеса; 2) четырехлопастного винта; 3) переключающего механизма (пусковой и замыкающий механизм); 4) счетчика числа оборотов с механизмом подачи шариков; 5) устройство для регистрации направления течения; 6) руля (хвоста).
Основные части прибора укреплены на раме, которая может свободно вращаться около вертикальной оси на шарикоподшипниках. В нижней части оси имеется ушко для подвешивания гидрометрического груза, в верхней части – подвесное приспособление для закрепления троса. Рама имеет две консоли, на которых крепится защитное колесо лопастного винта для предохранения его от повреждений. Торцы консолей связывает откидная штанга. В середине штанги располагается передний подшипник лопастного винта. Лопастной винт состоит из трубчатой оси, в которую впаяны спицы с лопастями, расположенными под углом 45°. На оси нарезан червяк, с которым при помощи переключающего механизма сцепляется верхняя шестеренка счетчика оборотов. Счетчик оборотов представляет собой коробку, в которой располагаются три сцепленные друг с другом шестеренки. С внешней стороны коробки надеты стрелки для отсчета единиц, десятков, сотен и тысяч оборотов. Счетчик соединяется с осью лопастного винта посредством червяка и первой (верхней) шестерни. Регистратор направления течения состоит из узкой трубочки магазина 7, диска 8 с тремя выемками по окружности, сидящего на оси верхней шестеренки 9 счетчика, нижней трубочки 10 и компасной коробки 11. Трубочка 7 перед наблюдениями заряжается 20-23 бронзовыми шариками. Компасная коробка перегородками 14 разделена на 36 секторов, пронумерованных против часовой стрелки от 0 до 35. Компасная коробка крепится на раме таким образом, что сектор 0° всегда устанавливается в сторону руля (т.е. по направлению течения). В центре коробки укреплена шпилька 12, на которой вращается магнитная стрелка 13, имеющая желобок вдоль северного конца. Крышка коробки 15 откидывающаяся, с отверстием 16 в центре. Переключающий механизм служит для включения в начале и выключения в конце наблюдений верхней шестерни из зацепления с червяком оси вращения лопастного винта. Этот механизм состоит из барабанчика 19, штока (спускового стержня) 21, муфты 22 и посыльных грузов 23. Включение и выключение производится последовательными ударами посыльных грузов по муфте 22. Помещенная в муфту 22 пружина удерживает ее в крайнем верхнем положении. Посредством ролика, входящего в кольцевую проточку 25 муфты 22, движение последней передается штоку 21. При возвратно-поступательном движении штока 21 два зубца, находящиеся на его нижнем конце, поочередно освобождают и стопорят барабанчик 19, поворачивающийся каждый раз под действием заключенной в нем плоской пружины на небольшой угол. При этом палец 25 барабанчика, входящий в прорезь планки счетчика, качая счетчик оборотов, вводит или выводит из зацепления верхнюю шестеренку 9 с червячной нарезкой на оси 3 лопастного винта. Зубцы на торце барабанчика 19, находящиеся в зацеплении с зубцами штока 21, позволяют устанавливаться барабанчику в трех положениях: 1 положение – счетчик выключен, 2 положение – счетчик включен и 3 положение – счетчик выключен. Включение и выключения счетчика оборотов осуществляется следующим образом. Перед опусканием вертушки в воду барабанчик 19 заводится с помощью имеющегося на нем рычажка в направлении снизу вверх. В результате этого палец 25 барабанчика качнет счетчик и верхняя шестеренка счетчика выйдет из зацепления с червячной нарезкой на оси вращения лопастного винта. Счетчик оборотов выключается. После того как вертушка будет опущена на требуемую глубину, посыльный груз с головкой надевается на трос своей прорезью, проведенной и в корпусе, и в головке до центрального отверстия. После этого головка поворачивается на 900, и груз получает возможность скользить по тросу, не сваливаясь с него. Дойдя до вертушки, груз ударяет по муфте 22, последняя опускается и освобождает барабанчик 19, который поворачивается под действием своей пружины. При этом палец 25 барабанчика поворачивает счетчик оборотов 4 на его шарнире и сцепляет верхнюю шестеренку 9 счетчика с червячной нарезкой оси лопастного винта 3, включая счетчик оборотов. При ударе второго посыльного груза муфта 22, поднявшаяся под действием помещенной в нее пружины, опускается и поднимается вновь, отводя счетчик от оси лопастного винта. Стрелки счетчика перестают вращаться, показывая число оборотов лопастного винта за время наблюдения (между ударами первого и второго грузов). Регистратор направления течения работает следующим образом. Магнитная стрелка компасной коробки устанавливается по магнитному меридиану. Рама вертушки с компасной коробкой ориентируется благодаря наличию руля против направления течения. Лопастной винт вращается под действием течения. При вращении верхней шестерни 9 счетчика, шарики из трубочки-магазина 7 через каждую 1/3 оборота диска 8 (что соответствует 33 1/3 оборота лопастного винта) попадают в выемки на диске и перемещаются к нижней трубочке 10. Из нижней трубочки шарики попадают в отверстие в крышки компасной коробки на чашечку магнитной стрелки 13 и по желобку северного конца магнитной стрелки скатываются в отсек компасной коробки, находящийся в данный момент под северным концом стрелки. Так как магнитная стрелка сохраняет постоянное положение, а весь прибор с компасной коробкой вращается около вертикальной оси, то угол, образуемый магнитной стрелкой с нулевым сектором коробки, будет равен магнитному азимуту направления течения. Таким образом, направление вектора скорости течения располагается под таким углом к магнитному меридиану, под каким углом сектор, в который выпали шарики, расположен относительно нулевого сектора коробки. Батометр-бутылка При измерении расхода взвешенных наносов производят отбор проб воды на мутность в тех точках скоростных вертикалей, в которых измеряются скорости течения при определении расхода воды. Для отбора проб воды применяются приборы, которые называются батометрами. К ним относятся батометр-бутылка на штанге (ГР-16, ГР-16М), батометр-бутылка в грузе (ГР-15), вакуумный батометр (ГР-61). Все они являются батометрами длительного наполнения и позволяют определить осредненную во времени мутность воды. Батометр-бутылка (рис. 13) предназначен для отбора проб на мутность в отдельных точках и интеграционным способом. Он представляет собой литровую бутылку с металлической пробкой-головкой, в которую вмонтированы водозаборная и воздухоотводная трубки. При отборе пробы батометр устанавливается на заданную глубину с помощью штанги или лебедки. В первом случае (см. рис. 13б, в) он вставляется в специальную обойму, закрепленную на штанге под углом 25° или горизонтально, а во втором помещается в полый груз рыбовидной формы (см. рис. 13г). Горизонтальное расположение батометра позволяет отбирать пробы вблизи дна. Грузы для батометра-бутылки выпускаются массой 15, 50 и 75 кг. При скорости течения до 1 м/с используется груз массой 15 кг, при скорости от 1 до 3 м/с – 50 кг, а при скорости свыше 3 м/с – 75 кг. Точность определения мутности батометром-бутылкой существенно зависит от соотношения скорости течения в точке отбора пробы и скорости движения воды в водозаборной трубке. Для снижения погрешностей определения мутности, связанных с этим фактором, скорость поступления воды в батометр регулируется специальными сменными насадками, которые навинчиваются на водозаборную и воздухоотводную трубки.
Рис. 13. Батометр-бутылка: а – общий вид; б – батометр-бутылка ГР-16; в – батометр-бутылка ГР-16М; г – батометр-бутылка ГР15. 1 – сменная насадка водозаборной трубки; 2 – водозаборная трубка; 3 – металлическая пробка-головка; 4 – хомут; 5 – бутылка емкостью 1 л; 6 – зажим головки; 7 – насадка воздухоотводной трубки; 8 – воздухоотводная трубка
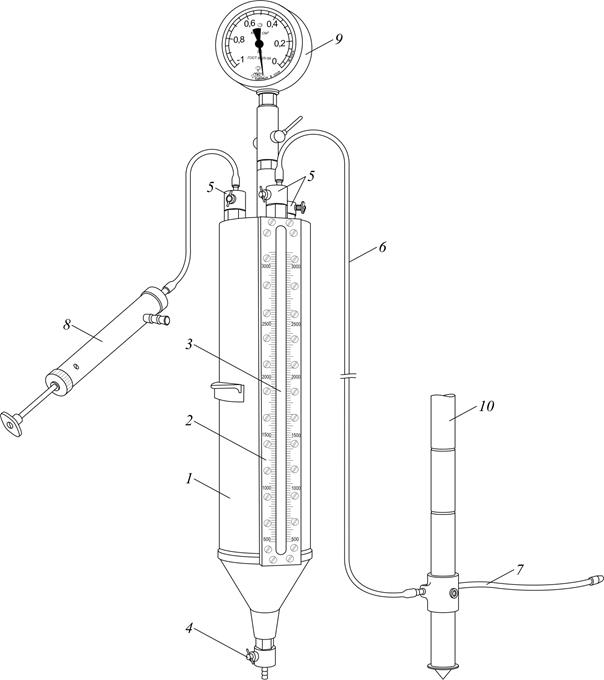
Вакуумный батометр Вакуумный батометр применяется для отбора проб точечным способом. Принцип отбора пробы этим батометром заключается в поступлении воды в прибор за счет разряжения воздуха в вакуумной камере. Прибор состоит из трех основных частей (рис. 14): вакуумной камеры, ручного насоса двойного действия, водозаборного наконечника.
Рис. 14. Вакуумный батометр: 1 – вакуумная камера; 2 – шкала; 3 – смотровая щель; 4 – сливной кран; 5 – краны; 6 – шланг-водовод; 7 – водозаборный наконечник; 8 – ручной насос.
Вакуумная камера служит емкостью для пробы воды. Она соединяется с насосом и водозаборным наконечником резиновыми шлангами, вводы для которых находятся в верхней части камеры и оборудованы кранами. Верхняя часть камеры цилиндрической формы, нижняя – воронкообразной. В носике воронки имеется кран для слива пробы. Четвертый кран, расположенный в верхней части камеры, предназначен для компенсации вакуума воздухом после окончания отбора пробы. Смотровая щель, проходящая вдоль цилиндрической части камеры, позволяет вести визуальный контроль за ее заполнением и отсчитывать объем пробы по шкале, расположенной слева и справа от смотровой прорези. Смотровая щель закрыта стеклом. Откачка воздуха из камеры производится ручным насосом, а глубина вакуума определяется вакуумным манометром. При отборе пробы вакуумным батометром необходимо придерживаться следующего порядка: 1) водозаборный наконечник, укрепленный на штанге или грузе, погружается в точку отбора пробы. Компенсационный, сливной и водозаборный краны перекрыты; 2) в камере путем откачки воздуха насосом создается необходимый вакуум, глубина которого в зависимости от скорости течения, длины шланга-водовода и высоты камеры над поверхностью воды задается градуировочной таблицей прибора. При отсутствии в комплекте прибора манометра глубина вакуума при отборе пробы контролируется по расходу поступления воды в камеру (QК, мл/с), который в зависимости от скорости течения (U, м/с) рассчитывается по формуле QК=28, 3U; 3) после установления в камере необходимого вакуума для отбора пробы открывают кран шланга-водовода, соединяющего камеру с водозаборным наконечником. Глубина вакуума поддерживается на заданном уровне путем откачки воздуха; 4) после заполнения камеры до нужного объема открывают компенсационный кран, а кран водовода перекрывают. По шкале определяют объем пробы и сливают ее бутыль через сливной кран. 5) опорожняют шланг-водовод от оставшейся в нем воды путем нагнетания в него воздуха насосом. Вакуумный батометр применяется при скоростях течения от 0, 2 до 3, 5 м/с. Высота установки вакуумной камеры над поверхностью воды при отборе пробы не должна превышать 3–4 м. Переливая пробу из батометра необходимо следить, чтобы на их стенках не оставалось твердых частиц. Бутылки, в которые переливаются пробы, должны быть пронумерованы и тщательно вымыты. ЭХОЛОТЫ Принцип работы эхолота В настоящее время наиболее совершенными средствами измерения глубин являются эхолоты, которые обеспечивают полную автоматизацию промеров. Определение глубин с помощью эхолотов основано на измерении промежутка времени между моментом посылки ультразвукового сигнала по направлению ко дну и моментом возвращения отраженного от дна эхо-сигнала. По физической природе звук (ультразвук) представляет собой механические колебания частиц упругой среды, источником которых является помещенное в водную среду колеблющееся твердое тело. Колеблясь, источник звука вызывает периодическое сжатие и растяжение прилегающих слоев. Благодаря взаимодействию соседних элементов среды, упругие деформации передаются от одного участка к другому. В результате в водной среде образуются области сгущений и разряжений, которые последовательно удаляются от источника колебаний. Этот процесс называется распространением акустической волны. Прием и излучение ультразвуковых сигналов у эхолотов производится акустическими антеннами. Основной частью ультразвуковых антенн являются электроакустические преобразователи (вибраторы), в которых происходит преобразование электрической энергии в механическую и наоборот. Поверхность вибратора находится в соприкосновении с водной средой. В режиме излучения сигнала под действием переменного магнитного или электрического поля поверхность вибратора приходит в состояние колебания, передаваемого водной среде. В режиме приема поверхность вибратора под действием отраженной звуковой волны начинает совершать механические колебания, преобразуемые в электрический сигнал. В настоящее время применяются акустические преобразователи, обладающие магнитострикционным или пьезоэлектрическим эффектом. Явление изменения линейных размеров ферромагнитных тел (железо, никель, кобальт) при изменении напряженности пронизывающего их магнитного поля или изменение магнитного состояния этих тел вследствие их деформации под действием механических сил называется магнитострикцией. Прямым магнитострикционным эффектом называется явление изменения линейных размеров ферромагнетиков при помещении их в переменное магнитное поле. Прямой эффект используется в передающих антеннах. Изменение напряженности магнитного поля, создаваемого поляризованным (намагниченным) ферромагнетиком вследствие изменения его линейных размеров под действием внешних сил, называется обратным магнитострикционным эффектом. Обратный эффект используется в приемных антеннах. Конструктивно магнитострикционный преобразователь представляет собой пакет никелевых пластин, который охватывает катушка (обмотка). В передающих антеннах для создания переменного магнитного поля в пакете пластин через катушку пропускают переменный ток. Находясь в переменном магнитном поле, предварительно намагниченные пластины изменяют свою длину с той же частотой, с которой меняется магнитное поле. Механические колебания вибратора передаются водной среде, что приводит к излучению ультразвукового сигнала. В приемных антеннах с обмотки снимают электрический сигнал, наводимый переменным магнитным полем, возникающим при деформациях пакета пластин. Отразившийся от дна ультразвуковой сигнал воздействует на предварительно намагниченный пакет никелевых пластин и изменяет его продольные размеры. В результате механических колебаний вибратора возникает магнитное поле, которое наводит электрический импульс в охватывающей пакет обмотке. Пакет вибратора-излучателя и вибратора-приемника располагают в одном водонепроницаемом корпусе – обтекателе забортного устройства. Забортное устройство снабжено приспособлением для крепления его к борту судна при выполнении промеров глубин. При этом обтекатель забортного устройства устанавливают параллельно поверхности воды. Его нижняя плоскость должна быть заглублена не менее чем на 0, 3 м. Действие пьезоэлектрических преобразователей основано на пьезоэффекте, которым обладают некоторые естественные и искусственные кристаллы. В настоящее время в качестве пьезоэлектрического материала используется керамика титаната бария или цирконата титаната свинца. Прямым пьезоэлектрическим эффектом называется явление, состоящее в том, что при деформациях сжатия или растяжения поляризованного кристалла, на его поверхности появляются электрические заряды. Этот эффект используется в вибраторах-приемниках. Обратный пьезоэлектрический эффект заключается в том, что кристалл, помещенный в электрическое поле, будет изменять свои линейные размеры с частотой изменения электрического поля. Это свойство используется в излучающих антеннах. Поскольку пьезоэлектрические преобразователи обычно обладают и прямым и обратным пьезоэффектом, то у многих эхолотов для излучения и приема ультразвука используется одна и та же антенна. Принцип определения глубины с помощью эхолота заключается в измерении промежутка времени Dt между посылкой ультразвукового импульса и приходом отраженного от дна эхо-сигнала. Считая скорость распространения ультразвука в воде C0 постоянной, глубина h определится по формуле: Структурная схема эхолота представлена на рис. 20. Блок управления БУ предназначен для включения, настройки, регулировки эхолота и контроля за его работой.
Рис. 20. Структурная схема эхолота
Блок питания БП служит для преобразования постоянного тока источника питания ИП (аккумулятор или судовая сеть) в переменный ток с последующим его выпрямлением в постоянные токи различных напряжений для питания электрических цепей эхолота. Генератор Г вырабатывает электрические импульсы заданной частоты и подает их на электроакустический преобразователь (вибратор-излучатель ВИ), который излучает ультразвуковой сигнал в водную среду. Отраженный от дна эхо-сигнал поступает на вибратор-приемник ВП, где преобразуется в электрический сигнал, который после усиления в усилителе У поступает на индикатор И. Индикатор И принимает сигналы, фиксирует их и управляет посылкой следующих импульсов генератором. По способу определения промежутка времени Электромеханическая развертка времени реализуется в электромеханических самописцах. Электронная – в цифровых указателях глубин, использующих либо цифровой индикатор, либо электронный самописец (жидкокристаллический дисплей) с блоком памяти, либо их комбинацию. ЛАБОРАТОРНАЯ РАБОТА №1
Гидрометрические вертушки Цель работы: изучение устройства и ознакомление с правилами обращения и ухода за вертушками ГР-21М, Гр-99, ВММ, ИСП-1М
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
1. Изучение устройства основных частей вертушек: корпуса, механизма регистрации числа оборотов, ходовой части, лопастного винта, сигнального устройства. 2. Приобретение навыков сборки и разборки вертушек. Ознакомление с правилами ухода за ними. 3. Ознакомление с вспомогательным оборудованием и средствами, используемыми при работе с вертушками (штанга, указатель направления течения, вертлюг, гидрометрический груз, гидрометрическая лебедка).
Лабораторная работа №2 Лабораторная работа №3 В гидравлическом лотке ЦЕЛЬ РАБОТЫ: требуется измерить скорости течения микровертушкой в трех точках на пяти вертикалях и вычислить расход воды аналитическим способом.
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
1. Производится измерение скоростей течения микровертушкой на заранее размеченных в лотке вертикалях в трех точках по глубине каждой вертикали: 0, 2h; 0, 6h и 0, 8h (где h – рабочая глубина). Для этого вертушка крепится к штанге на требуемой глубине и опускается в воду. Установив вертушку перпендикулярно гидрометрическому створу, одновременно включают счетно-импульсный механизм вертушки и секундомер. По истечении 60 с (время выдержки вертушки) измерения прекращают выключением счетчика импульсов. По индикаторному устройству определяется суммарное число оборотов лопастного винта. Данные работы вертушки записываются в журнал «Измерения на скоростных вертикалях» (табл. 2). Таблица 2
2. Определяется скорость в точке. Делением суммы N лопастного винта на продолжительность Т наблюдений рассчитывается число оборотов п в одну секунду: п=N/Т. Затем по найденному числу оборотов по градуировочной (тарировочной) зависимости находится соответствующая скорость течения. Результаты вычислений записываются в табл. 2. 3. Вычисляется расход воды аналитическим способом в следующей последовательности: а) определяется площадь отсеков между скоростными вертикалями fs посредством планирования частей поперечного профиля или аналитически. Результат вычисления записывается с точностью: при fs < 10 м2 – до 0, 01 м2; при 10≤ fs< 100 – до 0, 1 м2; при fs≥ 100 м2 – до 1 м2; б) вычисляется средняя скорость на вертикалях uN по формуле: где u0, 2h, u0.6h и u0.8h – соответственно значения измеренных скоростей в точках 0, 2h, 0, 6h и 0.8h каждой вертикали N; Вычисленные значения скоростей течения округляются до 0, 01 м/с. в) средняя скорость uS в отсеке между скоростными вертикалями вычисляется как полусумма полученных на них значений uNi и uNj: uS=0, 5(uNi +uNj). Для прибрежных отсеков водного сечения (от уреза до первой скоростной вертикали и от последней вертикали до уреза воды) средняя скорость принимается равной средней скорости на ближайшей к берегу скоростной вертикали, умноженной на коэффициент k, значения которого берутся в зависимости от характера берега (при выполнении работы принимается значение k=0, 9); г) частичные расходы Δ QS находят как произведение uS× fS, а полный расход Q – как сумму частичных расходов S Δ QS. Расчетная формула для полного расхода через живое сечение имеет вид:
Вычисленные значения расходов воды округляются до 10 м3/с при Q≥ 1000м3/с, до трех значащих цифр при 10≤ Q≤ 1000 м3/с, до 0, 01 м3/с при 0, 1≤ Q≤ 10 м3/с, до 0, 001 м3/с при Qs< 0.1 м3/с. Результаты вычислений сводятся в табл. 3. Таблица 3 Вычисление расхода воды
Лабораторная работа №4 Лабораторная работа №5 ПРАКТИЧЕСКАЯ РАБОТА №1 ПРАКТИЧЕСКАЯ РАБОТА №2 По гидрометрическим данным
ЦЕЛЬ РАБОТЫ: по данным измерений уровней и расходов воды на гидрологическом посту требуется построить кривую расходов, определить ежедневные расходы воды и вычислить характеристики стока (среднегодовой расход воды, годовой объем, модуль и слой стока). ИСХОДНЫЕ ДАННЫЕ: а) ведомость измеренных расходов воды; б) ведомость ежедневных уровней воды; в) хронологический график переходных коэффициентов kзимн.=f (ТЗ) (условный). ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
1. На листе миллиметровой бумаги по данным ведомости измеренных расходов строят графики Q=f(H); w=f(H) и uср=f(H). Уровни воды Н откладываются на вертикальной оси, а на горизонтальной – расход воды Q, м3/с; площади поперечного сечения w, м2 и средние скорости течения uср, м/с (рис. 27). Масштабы для построения кривых подбираются в зависимости от амплитуды уровней, расходов, площадей и скоростей течения с таким расчетом, чтобы хорда кривой расходов расположилась примерно под углом 45°, а хорды кривых площадей и средних скоростей – под углом 60° к оси абсцисс. При этом должно быть обеспечено определение расхода воды с точностью не более 2%. Точки с координатами (Q, H), (w, H) и (uср, H) обводятся кружками диаметром 1, 5-2, 0 мм; против точек расходов на расстоянии 1-2 см от них (по горизонтали) выписываются их номера по ведомости измеренных расходов. При значительной амплитуде расходов, когда отношение наибольшего расхода к наименьшему составляет 20 и больше, нижняя часть кривой расходов в пределах 20-30% амплитуды уровней вычерчивается в увеличенном масштабе (обычно в 5-10 раз крупнее). Это позволяет точнее определить расходы воды при низких уровнях. На чертеже обязательно показывается положение высшего и низшего уровней, и выписываются даты их наступления. 2. В случае наличия однозначной зависимости, когда точки образуют на плавную кривую с выпуклостью, обращенной к оси уровней, кривая расходов Q=f(H) производится посередине полосы рассеивания точек (Q, H) сначала от руки, а затем по лекалу. При этом, если отдельные точки не ложатся на кривую, надо следить за тем, чтобы эти точки лежали по обе стороны проводимой кривой и взаимно уравновновешивались. Точно также строятся кривые зависимости w = f(H) и uср = f(H).
Если точки фактических измерений образуют на графике связи полосу с разбросом точек в пределах ±5% Q, то кривая расходов строится по центрам тяжести. Для подсчета центров тяжести кривую разбивают на 5-8 интервалов по шкале Н. Координаты центров тяжести находят как средние арифметические значения Q и Н для заданных интервалов. Точки, определяющие положение центров тяжести, закрепляют на графике двойными кружками. Аналогично, в случае необходимости, вычисляют координаты центров тяжести для групп кривых точек w = f(H) и uср = f(H). 3. После построения кривых их взаимно увязывают. Взаимное соответствие кривых Q=f(H), w = f(H) и uср=f(H) выражается равенством Q=wuср. Популярное:
|
Последнее изменение этой страницы: 2016-06-04; Просмотров: 954; Нарушение авторского права страницы





 . При температуре воды 15°C скорость распространения ультразвука составляет ≈ 1465 м/с.
. При температуре воды 15°C скорость распространения ультразвука составляет ≈ 1465 м/с.
 эхолоты подразделяются на приборы с электромеханической разверткой времени и с электронной разверткой времени. Существуют также комбинированные эхолоты, использующие оба принципа развертки времени.
эхолоты подразделяются на приборы с электромеханической разверткой времени и с электронной разверткой времени. Существуют также комбинированные эхолоты, использующие оба принципа развертки времени. (1)
(1) (2)
(2)
