
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Основные статические характеристики СИ СА
Точность, разрешающая способность и порог чувствительности Точность (погрешность) - характеризует степень отличия результата измерения от точного значения, связанного с эталоном единицы ФВ. Показывает, какое минимальное отклонение измеряемой величины может быть зарегистрировано СИ. Порог чувствительности – минимальное значение измеряемой СИ величины, равное его погрешности. Например, если модуль ввода в диапазоне измерений -10...+10В имеет погрешность ±0.05%, то его порог чувствительности равен ±5 мВ. Разрешающая способность – характеризует способность различить близкие значения ФВ. Соответствуюет величине младшего значащего разряда (МЗР) СИ при измерении (т.е. преобразовании значения ФВ в цифровую форму). В приведенном примере: в диапазоне (10 – (-10) = 20) при 16-разрядном АЦП этот модуль может различить 2 входных сигнала, отличающихся на 20/2 16 = 0.3 мВ, т.е. его разрешающая способность в |±5/0, 3 | = 16 раз выше порога чувствительности. Это справедливо если уровень собственных шумов модуля ввода ниже величины МЗР, т.е. погрешность модуля является чисто систематической. Порог чувствительности, определяемый погрешностью измерений, может быть гораздо больше, чем разрешающая способность, поскольку включает: · нелинейность СИ во всем диапазоне измерений; · динамику процесса старения СИ; · технологический разброс метрологических параметров от прибора к прибору; · не только систематическую, но и случайную погрешность. Некоррелированная компонента погрешности может быть уменьшена до уровня МЗР путем многократных измерений с последующим усреднением результатов. Разрешающая способность не зависит от перечисленных факторов, что объясняет ее отличие от порога чувствительности и погрешности. Примеры существенных отличий требований к погрешности и разрешающей способности. Пример 1. Релейный регулятор по знаку разности между температурой в печи и значением уставки. Если используется термопара с погрешностью 2°С, то для измерения температуры в диапазоне 0...100 °С достаточно 50 уровней квантования, обеспечиваемых 6-разрядным АЦП. В этом случае колебания температуры в процессе регулирования не могут быть менее 2°С. Если же использовать 16-разрядный АЦП, то разрешающая способность по температуре составит 100/2 16 = 0.0015°С. Пример 2. В элеваторах для хранения растительного сырья наблюдается эффект самосогревания, связанный, с деятельностью микроорганизмов (гниение). Для обеспечения качества зерна абсолютное значение температуры достаточно знать с погрешностью в несколько °С, но факт ее роста желательно фиксировать с разрешающей способностью 0.1...0.01°С. Высокая разрешающая способность позволяет предупредить развитие очага самосогревания на ранней стадии и расположить датчики температуры на большом расстоянии один от другого. Пример 3. Для обнаружения момента времени начала химической реакции по признаку начала роста температуры, необходим прибор с высокой разрешающей способностью, но необязательно высокой точностью. Пример 4. При оценке параметров колебательного процесса (декремент затухания колебаний, период колебаний, коэф-т нелинейных искажений, длительность переходного процесса, величина помехи на фоне полезного сигнала) - находится соотношение ординат или абсцисс функции в разных ее точках, т.е. пропорции между отдельными частями графика, которые не зависят от самого значения функции. Поэтому такие измерения могут быть выполнены прибором, имеющим низкую точность, но высокую разрешающую способность. Дополнительным требованием в этом примере является достаточная линейность измерительного канала в рассматриваемом диапазоне.
Для улучшения разрешающей способности при низкой точности используется электронная лупа (zoom) – линейное усиление сигналов. Точность, разрешающая способность и порог чувствительности в общем случае выше у АЦП с большим числом двоичных разрядов, хотя прямой связи нет, проскольку АЦП с высокой разрядностью может иметь большой уровень шумов, высокую нестабильность источника опорного напряжения и связанную с ними низкую точность. Функция автокорреляции Погрешности измерений, обусловленные наведенными помехами и собственными шумами электронных приборов, описываются с помощью математической теории случайных процессов. Основные понятия этой теории, используемые далее при нормировании случайной составляющей погрешности измерений, определяются ГОСТ 8.009. Отличительной чертой случайного процесса является невозможность предсказания его мгновенного значения, поэтому отдельные его реализации описываются случайными функциями x(t), значения которых в любой момент времени t являются случайными величинами. Запись мгновенных значений случайного процесса дает только одну реализацию случайного процесса, поскольку его повторные записи в тех же самых условиях показывают другую функцию времени. Для аналитического описания случайных функций времени используются их статистические характеристики: математическое ожидание:
среднеквадратическое отклонение (дисперсия):
автокорреляционная функция (усредненное произведение реализаций, сдвинутых по времени на величину τ ):
коэф-т корреляции случайного процесса: r(t) = R(t)/σ 2х (4.7) Стационарный случайный процесс – с постоянными статистическими характеристиками. Центрированный случайный процесс – с отсутствующей постоянной составляющей mх.
Рис. хх.1. Коррелированный (а) и некоррелированный (б) случайные процессы (погрешности измерений)
Если реализация случайного процесса x(t) имеет ограниченный по частоте спектр, то при растяжении ее графика во времени наступает момент, когда он начинает выглядеть не как шум, а как извилистая гладкая кривая. Поэтому вероятность того, что при достаточно малом сдвиге τ значения функции будут различаться сильно - пренебрежимо мало. При увеличении τ эта вероятность возрастает. Поэтому при малых τ автокорреляционная функция всегда мало отличается от σ 2х, а коэф-т корреляции - от единицы. Интервал корреляции (время корреляции) - величина временного сдвига τ к, при превышении которого корреляцией можно пренебречь в условиях конкретных измерений:
Если интервал корреляции равен нулю, то случайный процесс называют некоррелированным или белым шумом. (рис.хх1). Все реальные процессы являются коррелированными, поскольку имеют ограниченную мощность и, следовательно, ограниченную полосу частот. Однако на определенном интервале времени (частот) их приближенно можно считать некоррелированными. Определения (хх.4)-(хх.8) используются только при теоретическом анализе случайных процессов. В СА значения случайной величины всегда дискретны и количество измерений ограничено. Поэтому вместо указанных характеристик используют соответствующие им выборочные значения, или оценки соответствующих статистических параметров: оценка математического ожидания :
оценка среднеквадратического отклонения:
оценка автокорреляционной функции: В пределе при N→ ∞ приведенные оценки параметров стремятся к их истинным значениям. Отдельно взятая реализация случайного процесса x(t) является детерминированной (неслучайной) функцией, поэтому для нее можно найти спектральную характеристику с помощью преобразования Фурье:
Однако функция X(jω ) на практике не используется, поскольку она также сложна в описании, как и x(t). Вместо нее используют понятие спектральной плотности мощности (энергетического спектра):
По определению, спектральная плотность мощности шума измеряется в В2/с или В2 Гц, А2 Гц и т.п. В теории случайных процессов понятие мощности отличается от общепринятого: предполагается, что энергия шума выделяется на сопротивлении 1 Ом, но размерность [Ом] не указывается, поэтому вместо размерности мощности [Вт] = [В 2 /Ом] = [А 2 Ом] используется [В 2 ], [А 2 ]. Аналогично, энергия измеряется не в [Дж] = [В 2 с Ом] = [А 2 с Ом], а в [В 2 с] = [А 2 с]. Можно показать, что поскольку R(0) = σ 2х то при t = 0 :
Если энергетический спектр лежит в диапазоне частот от fН > 0 до fВ (например, благодаря применению фильтра), то можно считать, что за пределами указанного диапазона частот его значения равны нулю, то:
(4.15)
Следовательно, среднеквадратическая погрешность измерения (например, напряжения σ V [В]) в диапазоне частот [ fН, fВ ] составит:
Коэф-т корреляции. При расчете погрешности ИК возникает задача суммирования случайных погрешностей входящих в него элементов. Способ суммирования зависит степени статистической зависимости между собой этих случайных величин.
Рис. 4.2. Примеры сильной (а), Rху = 0, 954 и слабой (б), Rху = -0, 045 корреляции случайных величин X и У. Прямая линия - среднеквадратическая регрессия
Если с ростом одной случайной величины X в среднем увеличивается (или уменьшается) и вторая У (рис. 4.2), то между ними имеется статистическая зависимость. Для ее количественного описания используются понятия ковариации и коэф-та корреляции. При суммировании 2-х центрированных случайных погрешностей X и У, дисперсия суммы по определению равна математическому ожиданию квадрата их суммы: D[X ± У] = М[(Х ± У)2] = М[Х2 ± 2ХУ + У2] = М[Х2] + М[У2] ± 2M[XY] = = σ 2Х + σ 2У ± 2KХУ, (4.17) где D[а] и М[а] - операторы дисперсии и математического ожидания; σ Х + σ У – среднеквадратические отклонения случайных величин X и У. Совместная вариация (ковариация) случайных величин X и У: KХУ = M[XУ] (4.18) Ковариацию дискретных случайных величин можно оценить по их дискретным значениям X = {х1,...хn} и У = {у1, …уn} определив среднее арифметическое:
Коэф-т корреляции RXY - отношение ковариации к произведению среднеквадратических отклонений σ Х и σ У случайных величин X и Y:
Когда случайные величины X и Y независимы, RXY = 0 и такие величины называются некоррелированными. Если RXY = 1, то между величинами X и У имеется не статистическая, а функциональная зависимость. Используя понятие среднеквадратического отклонения σ Х2 = D[X], (4.17):
Здесь знак «-» используется, когда случайные величины вычитаются (например если определяется разность напряжений 2-х измерительных каналов). При этом наличие корреляции между каналами частично уменьшает погрешность разности. В случае, когда случайные величины статистически независимы ( RXY = 0 ):
Такое суммирование называют геометрическим, поскольку оно выполняется аналогично нахождению гипотенузы прямоугольного треугольника. Если RXY = +1, то:
Если RXY = -1, то
т.е. при определении суммы случайных величин, отрицательный коэф-т корреляции уменьшает итоговую погрешность, а при нахождении разности - увеличивает. Если случайные величины не центрированы (имеют mх и mу), то коэф-т корреляции:
На рис. 4.2 показаны примеры статистической зависимости между случайными величинами при сильной (а) и слабой (б) корреляции. Точки на графике (значения случайной величины) могут группироваться очень близко к прямой линии, которая аппроксимирует эту зависимость, и тогда статистическая зависимость приближается к детерминированной. Степень отличия статистической зависимости от детерминированной характеризуют коэф-ом корреляции RXY. Прямая линия, проведенная таким образом, что сумма квадратов отклонений значений случайной величины от этой линии минимальна, называется линией среднеквадратической регрессии. Тангенс угла наклона этой линии называется коэф-м регрессии. Уравнение линии регрессии можно получить методом наименьших квадратов: у = А(х - тХ) + тУ, где А – коэф-т регрессии, определяемый через коэф-т корреляции RXY и среднеквадратические отклонения σ Х и σ У:
Следовательно смысл коэф-та корреляции: для статистически центрированных переменных (с нулевым математическим ожиданием) с нормированных по величине среднеквадратического отклонения, это тангенс наклона линии среднеквадратической регрессии. Статистическая зависимость между погрешностями СИ в общем случае нелинейная, однако этой нелинейностью обычно пренебрегают. Популярное:
|
Последнее изменение этой страницы: 2016-06-05; Просмотров: 1034; Нарушение авторского права страницы
 (4.4)
(4.4) (4.5)
(4.5) (4.6)
(4.6)
 (4.8)
(4.8) (4.9)
(4.9) (4.10)
(4.10) (4.11)
(4.11) (4.12)
(4.12) (4.13)
(4.13) . (4.14)
. (4.14)
 (4.16)
(4.16)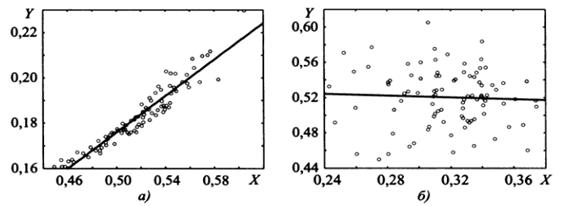
 (4.19)
(4.19) . (4.20)
. (4.20) (4.21)
(4.21) (4.22)
(4.22) (4.23)
(4.23) (4.24)
(4.24) (4.25)
(4.25) (4.26)
(4.26)