
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Описание поз тела спортсмена в граничных моментах фаз физического упражнения.
2.1. Открыть в программе Adobe Photoshop CS4 файл «Изменение позы тела спортсмена» (диск D/Биомеханика/Студент/Ф.И.О./Программа позы). 2.2. Установить флажок в форме глаза на первый кадр, сделав его видимым и убрать аналогичные флажки с остальных выбранных кадров видеограммы. · Установить курсор мыши на глаз слоя, который следует сделать видимым. · Удерживая клавишу Alt щелкнуть левой клавишей мыши. 2.3. Активировать инструмент «Линейка». 2.4. Активировать команду «Свернуть в окно» (правый верхний угол, около значка «Закрыть») 2.5. Активировать электронную таблицу Microsoft Excel «3.1. Описание поз тела в граничных моментах фаз» (D/биомеханика/Образцы оформления таблиц в Excel/Исследование программы позы). 2.6. Активировать команду «Свернуть в окно». 2.7. С помощью мыши расположить окна программ Photoshop CS4 и Excel так, чтобы они были видны одновременно. 2.8. Измерить суставные углы тела спортсмена соблюдая правила: · В положении основной стойки все углы, подлежащие измерению, равны нулю. Поэтому следует измерять любые отклонения звеньев от основной стойки. · Измерения проводить в следующей последовательности – суставы правой ноги, суставы левой ноги, суставы правой руки, суставы левой руки, суставы позвоночного столба. · Последовательность измерений суставов в кинематической цепи определяется положением сустава, углы в проксимально расположенных суставах следует измерять в первую очередь. 2.9. Измерить суставные углы правой ноги. · Тазобедренный сустав. Выбрать инструмент Линейка. · С помощью мыши провести линейкой по линии обозначающей продольную ось туловища. · Захватить мышью линейку за середину и переместить ее так, чтобы дистальный конец, находившийся на оси плеч, оказался в центре тазобедренного сустава правой ноги. При этом ориентация линейки в пространстве сохранится. · Из центра тазобедренного сустава при нажатой клавише Alt провести линейкой по продольной оси бедра. · Использование линейки с клавишей Alt позволяет построить угол образованный двумя линейками, результат в градусах будет показан на панели параметров. · Определить знак угла. При использовании программы Photoshop CS4 знак угла не определяется, программа показывает модуль угла, поэтому следует учитывать, что он имеет знак «+» при повороте продольной оси звена «против часовой стрелки» относительно положения звена в позе основной стойки и знак «–» при повороте звена «по часовой стрелке». · Ввести значение угла в ячейку матрицы (3.1. Описание поз тела в граничных моментах фаз) с соответствующим знаком. · Коленный сустав. Провести линейкой по продольной оси бедра. · Захватить мышью линейку за середину и переместить ее так, чтобы дистальный конец, находившийся в центре тазобедренного сустава, оказался в центре коленного сустава правой ноги. При этом ориентация линейки в пространстве сохранится. · Из центра коленного сустава при нажатой клавише Alt провести линейкой по продольной оси голени. · Определить знак угла в коленном суставе. · Ввести значение угла в ячейку матрицы. · Голеностопный сустав. Провести линейкой по продольной оси голени. · Захватить мышью линейку за середину и переместить ее так, чтобы дистальный конец, находившийся в центре коленного сустава, совпал с маркером, обозначающим пятку правой ноги. При этом ориентация линейки в пространстве сохранится. · Из центра маркера пятки правой ноги при нажатой клавише Alt провести линейкой по линии, соединяющей крайние точки стопы. · Определить знак угла в голеностопном суставе. · Ввести значение угла в ячейку матрицы. · Предплюсноплюсневые суставы определите как элементы динамической осанки и в соответствующую ячейку матрицы внесите нулевое значение. 2.10. Измерить суставные углы левой ноги. · Использовать алгоритм, предложенный для измерения суставов правой ноги. 2.11. Измерить суставные углы правой руки. · С помощью мыши провести линейкой по линии обозначающей продольную ось туловища. · Захватить мышью линейку за середину и переместить ее так, чтобы дистальный конец, находившийся на оси плеч, оказался в центре плечевого сустава правой руки. При этом ориентация линейки в пространстве сохранится. · Из центра плечевого сустава при нажатой клавише Alt провести линейкой по продольной оси плеча. · Определить знак угла в плечевом суставе. · Ввести значение угла в ячейку матрицы. · Локтевой сустав. Провести линейкой по продольной оси плеча. · Захватить мышью линейку за середину и переместить ее так, чтобы дистальный конец, находившийся в центре плечевого сустава, оказался в центре локтевого сустава правой руки. При этом ориентация линейки в пространстве сохранится. · Из центра локтевого сустава при нажатой клавише Alt провести линейкой по продольной оси предплечья. · Определить знак угла в локтевом суставе. · Ввести значение угла в ячейку матрицы. · Лучезапястный сустав. Провести линейкой по продольной оси предплечья. · Захватить мышью линейку за середину и переместить ее так, чтобы дистальный конец, находившийся в центре локтевого сустава, совпал с маркером, обозначающим лучезапястный сустав правой руки. При этом ориентация линейки в пространстве сохранится. · Из центра лучезапястного сустава при нажатой клавише Alt провести линейкой по линии к центру тяжести кисти. · Определить знак угла в лучезапястном суставе. · Ввести значение угла в ячейку матрицы. · Запястнопястные суставы определите как элементы динамической осанки и в соответствующую ячейку матрицы внесите нулевое значение. 2.10. Измерить суставные углы левой руки. · Использовать алгоритм, предложенный для измерения суставов правой руки. 2.11. Измерить суставы позвоночного столба. · Суставы позвоночного столба определите как элементы динамической осанки и в соответствующие ячейки матрицы внесите нулевые значения. 2.12. Измерить и внести в соответствующие матричные формы электронной таблицы «3.1. Описание поз тела в граничных моментах фаз» суставные углы для остальных выбранных поз тела спортсмена. 2.13. Сохранить файл Excel «3.1. Описание поз тела в граничных моментах фаз» (используя функцию Microsoft Excel «Сохранить как») в папке «Программа позы (D/Биомеханика/Студент/Группа/Ф.И.О./Программа позы).
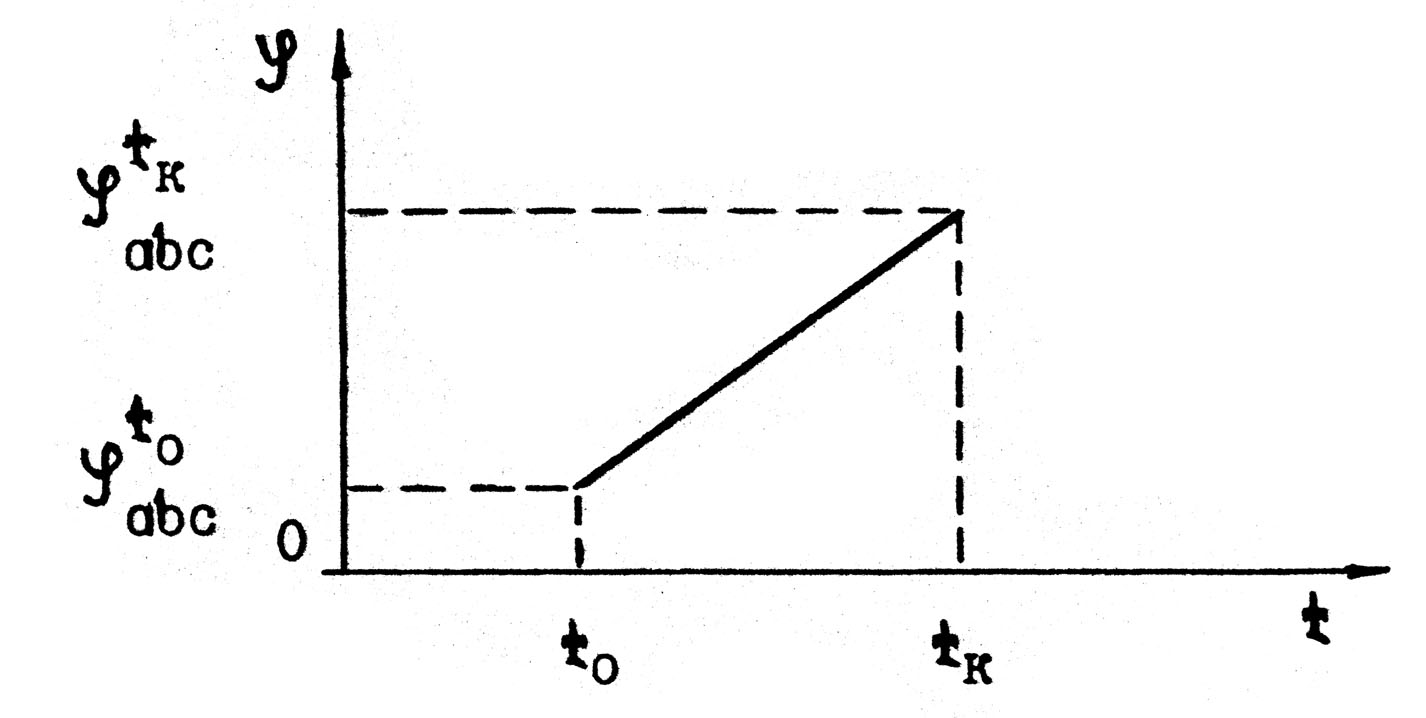
Лабораторная работа 3.2 ОПИСАНИЕ ИЗМЕНЕНИЙ ПОЗЫ ТЕЛА СПОРТСМЕНА Цель занятия: научиться описывать изменения позы тела с помощью индексного метода. Теоретические сведения Для описания изменяющейся позы тела каждый суставной угол следует представить в виде функций времени, вид которой зависит от характера суставного движения. В частности, при выполнении однократных (ациклических) движений для записи изменяющегося суставного угла может быть использована функция линейного характера:
φ
где: φ Более точным является гармоническое приближение, при использовании которого применяются периодические функции (sin и cos), выражающие зависимость суставного угла от времени. Запись суставного угла в виде линейной функции времени, представленной выражением (3.2.1), называется линейным приближением. На рис. 3.2.1 представлен график изменения угла такого ациклического суставного движения. Такое приближение используется для записи переменной позы в настоящей лабораторной работе и для его записи необходимо знать величину изменения каждого угла и время, за которое произошло указанное изменение. Для описания изменения позы тела в целом при выполнении сложных спортивных движений используют матричную форму записи, изложенную в лабораторной работе 3.1. Рассмотрим несколько примеров описания изменений позы тела при выполнении ациклических суставных движений. Пример 1. Спортсмен, находясь в положении основной стойки, за промежуток времени t2 – t1 = 0, 2 с, поднимает руки вперед с некоторой средней угловой скоростью. Позы тела для моментов времени t1 и t2 описываются следующим образом:
φ
Первая строка представляет собой матрицы (в свернутом виде), определяющие плоскость выполнения сгибательно-разгибательных движений, а приведенные ниже развернутые матрицы – непосредственно суставные углы, образованные при выполнении указанных движений. Величины изменений углов в суставах тела можно узнать, рассчитав разность между матрицами φ
Так как углы в плечевых суставах обеих рук за указанный промежуток времени изменились соответственно на –90 и 90, определим угловые скорости в плечевых суставах, пользуясь формулами (3.2.1):
С учетом полученных величин в промежутке между моментами времени t1 и t2 изменение позы тела спортсмена описывается следующим образом:
φ
φ
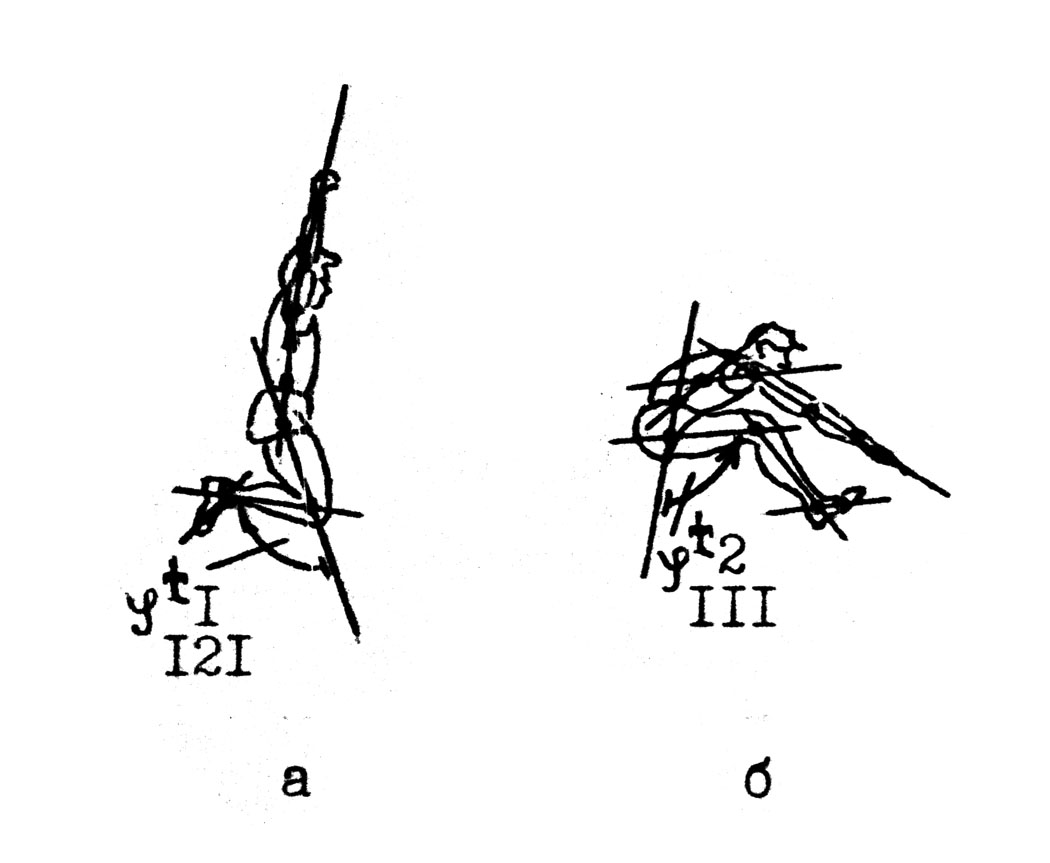
Пример 2. Спортсмен в ходе физического упражнения в момент времени t1 = 0 имел позу, изображенную на рис. 3.2.2а. Через 0, 2с в момент времени t2 – позу, представленную на рис. 3.2.2б. Если считать, что изменение суставных углов у спортсмена описывается функцией линейного характера (3.2.1), то закон изменения позы тела спортсмена в промежутке времени от t1 до t2 можно определить следующим образом. Пользуясь изображениями поз тела на рис. 3.2.2а и 3.2.2б, в соответствии с правилами отсчета измерим суставные углы и запишем матрицы начальной и конечной поз тела (отсутствие указания матриц для движений типа 1: φ
Определим изменение величин суставных углов:
Рис. 3.2.1
Рис. 3.2.2
Далее определим угловые скорости звеньев тела в процессе выполнения суставных движений, а также в соответствии с выражением (3.2.1) запишем закон изменения позы спортсмена при выполнении упражнения в промежутке времени от t1 до t2 (см. формулы 3.2.7 и 3.2.8).
Порядок выполнения работы Популярное:
|
Последнее изменение этой страницы: 2016-06-05; Просмотров: 744; Нарушение авторского права страницы
 = φ
= φ  + (ω
+ (ω  )t, (3.2.1)
)t, (3.2.1) = 0, φ
= 0, φ  ≠ 0
≠ 0 =
=
 =
=
 : *
: * **
**
 =
=

 ,
,  450 град/с.
450 град/с. = 0,
= 0,  = φ
= φ  + φ
+ φ  × t =
× t = и φ
и φ  свидетельствует об их нулевом значении (в соответствии с правилом умалчивания)):
свидетельствует об их нулевом значении (в соответствии с правилом умалчивания)):  =
=
 = φ
= φ