
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Степени свободы механизма. Универсальные структурные формулы
Степенью свободы механизма называется независимое перемещение одного или нескольких звеньев его кинематической цепи относительно стойки. В инженерной практике различают два типа механической системы: механизм и конструкция. Механизм имеет хотя бы одну степень свободы, тогда как конструкция обладает нулевым либо отрицательным числом степеней свободы. При проектировании и изготовлении механизма важно обеспечить требуемое число его степеней свободы; при проектировании и изготовлении жесткой конструкции, напротив, важно не допустить возникновения степеней свободы и превращения конструкции в механизм.
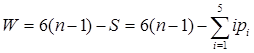
Для определения числа степеней свободы по схемам механизмов существуют так называемые универсальные структурные формулы. Пусть имеется механизм, число звеньев которого равно n и в нем есть кинематические пары всех пяти классов. Так как в механизме всегда есть стойка, то число подвижных звеньев
где i – класс кинематической пары, pi – число кинематических пар, имеющих класс i. Тогда число степеней свободы механизма определится в виде разности:
Полученное равенство известно в теории механизмов под названием структурная формула Сомова – Малышева.
Задача 1
Определить число степеней свободы манипулятора, схема которого изображена на рис. 6.
Решение
Манипулятор содержит
Задача 2
Определить число степеней свободы плоского шарнирного четырехзвенного механизма (рис. 7, а).
Решение
Механизм содержит четыре звена и четыре вращательные кинематические пары:
Полученный результат означает, что четырехзвенник с произвольно ориентированными в пространстве осями шарниров является не механизмом, а дважды статически неопределимой конструкцией. Для возникновения одной степени свободы требуется, чтобы три независимые связи в механизме стали повторяющимися (избыточными). Это достигается обеспечением параллельности осей шарниров, т.е. механизм должен быть обязательно плоским. Для плоских механизмов существует структурная формула Чебышева:
где pH – число низших, pB – число высших кинематических пар. Решая задачу 2 по формуле Чебышева (
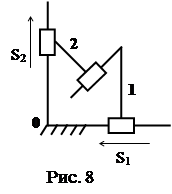
Существуют плоские механизмы, в которых звенья кинематической цепи движутся только поступательно. Такие механизмы называют клиновыми: наиболее часто они используются в ригельных замках. Схема трехзвенного клинового механизма изображена на рис. 8.
Для определения числа степеней свободы клиновых механизмов используется структурная формула Добровольского:
Число степеней свободы механизма (Рис. 8):
Местные подвижности
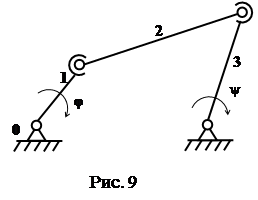
Местными подвижностями называются степени свободы механизма, не оказывающие влияния на передачу основного движения. Рассмотрим механизм (Рис. 9). По формуле Сомова – Малышева число его степеней свободы (
То есть, этот механизм не только существует как пространственный, но еще имеет две степени свободы. Одна степень свободы здесь является основной подвижностью, необходимой для передачи движения от звена 1 к звену 3. Вторая степень свободы (вращение шатуна 2 вокруг собственной оси) не влияет на передачу основного движения, поэтому является местной подвижностью. В общем случае, механизм может иметь как основные, так и местные подвижности: его число степеней свободы определяется равенством:
где WO – число основных, WМ – число местных подвижностей. Местные подвижности часто предусматривают в механизмах с целью обеспечения более благоприятного распределения нагрузки на звенья и равномерного изнашивания контактирующих поверхностей. При необходимости, местные подвижности можно устранить, повысив класс соответствующих кинематических пар.
Контрольные вопросы
1. Перечислите наиболее часто используемые плоские четырехзвенные рычажные механизмы. Приведите примеры машин или приборов, в которых есть такие механизмы. 2. Чем отличается кривошип от коромысла? Коромысло от кулисы? 3. Что называют степенью свободы механизма? 4. Чем отличается механизм от конструкции? 5. Что означает множитель «6» в структурной формуле Сомова - Малышева? 6. Для каких механизмов используется структурная формула Чебышева? 7. Какие механизмы называют клиновыми? Какую структурную формулу следует использовать для расчета степеней свободы клинового механизма? 8. Что называют местной подвижностью? 9. С какой целью местные подвижности предусматривают в механизмах? 10. Как можно устранить местную подвижность?
ЛЕКЦИЯ 4
Избыточные связи в механизмах. Классификация, выявление и устранение избыточных связей. Принцип строения рычажных механизмов. Классификация структурных групп.
Избыточные связи
Избыточными называют такие связи, которые не накладывают новых ограничений на перемещения звеньев механизма, а только повторяют уже существующие. Избыточные связи могут быть как в отдельных кинематических парах, так и на уровне механизма в целом. Различают избыточные связи трех типов: А, Б и В (по предложению профессора Озола).
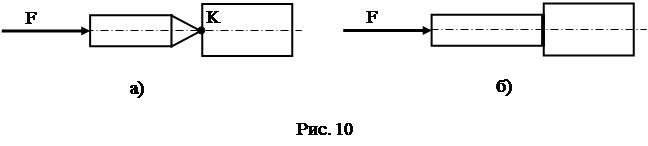
Избыточные связи типа А имеют место в отдельных кинематических парах. Для передачи усилия от одного звена к другому теоретически достаточно контакта в одной точке (Рис. 10, а). Если передача усилия обеспечивается поверхностным контактом, то соприкосновение звеньев во всех точках поверхности, кроме одной, будет образовывать избыточные связи типа А (Рис. 10, б).
Избыточные связи типа А являются полезными, когда требуется передача значительных усилий, поскольку звенья реальных механизмов не являются абсолютно твердыми, и в случае точечного контакта при большой силовой нагрузке будут иметь место существенные деформации, возможно также разрушение звеньев в зоне их соприкосновения. В отдельных случаях связи типа А являются вредными и устраняются. Например, кинематическая пара цилиндр-поршень в двигателе внутреннего сгорания будет работоспособной, если поверхностный контакт поршня с цилиндром заменить линейным контактом цилиндра с компрессионными кольцами (Рис. 11).
Избыточные связи типа Б имеют место в кинематических парах с ветвлением. Число избыточных связей типа Б рассчитывается по формуле:
где i - индекс ветвления пары, Si – число независимых связей в i – той ветви, S – класс кинематической пары.
Пример
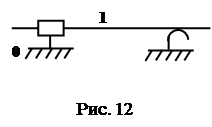
На рис. 12 изображена поступательная кинематическая пара с двумя ветвлениями.
Рассчитаем число избыточных связей типа Б:
Избыточные связи типа Б увеличивают жесткость кинематической пары, но требуют повышенной точности изготовления звеньев и сборки пары.
Избыточные связи типа В образуются при замыкании кинематических цепей в контуры, отсюда их второе название – контурные избыточные связи. Их число определяется по формуле Озола:
где W – число степеней свободы механизма, k – число замкнутых кинематических контуров, f – суммарное число степеней свободы кинематических пар механизма. Для плоского механизма число контурных избыточных связей может быть также найдено по формуле Малышева:
где WЧ – число степеней свободы механизма, рассчитанное по формуле Чебышева, WСМ – число степеней свободы того же механизма, рассчитанное по формуле Сомова – Малышева.
Задача
Определить число избыточных связей в плоском шарнирном четырехзвенном механизме (Рис. 7, а).
Решение
Для данного механизма
Механизм имеет три контурные избыточные связи, что и было отмечено в Задаче 2 п. 3.2.
Контурные избыточные связи увеличивают жесткость механизма, но требуют повышенной точности изготовления звеньев и сборки механизма. При необходимости, они могут быть устранены путем понижения класса одной или нескольких кинематических пар.
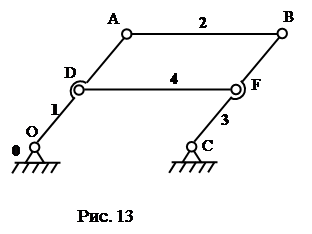
Избыточные связи могут быть также привнесены в механизм путем введения в его схему дополнительных звеньев. Рассмотрим механизм сдвоенного параллелограмма (рис. 13).
Здесь дополнительное звено – шатун 4. Так как механизм плоский, рассчитаем его число степеней свободы по формуле Чебышева (
Полученный результат означает, что с точки зрения структурного строения, рассматриваемая система механизмом не является. Для того чтобы возникла одна степень свободы, требуется соблюдение геометрических условий:
Популярное:
|
Последнее изменение этой страницы: 2016-06-05; Просмотров: 853; Нарушение авторского права страницы
 . Наибольшее возможное число степеней свободы такой системы в пространстве составит
. Наибольшее возможное число степеней свободы такой системы в пространстве составит  . Если считать, что связи в кинематических парах – независимые, то общее число связей, ограничивающих перемещение звеньев, выразится равенством:
. Если считать, что связи в кинематических парах – независимые, то общее число связей, ограничивающих перемещение звеньев, выразится равенством:  ,
,  .
. звена, имеет две вращательные и одну поступательную кинематические пары. Все указанные пары имеют пятый класс, поэтому
звена, имеет две вращательные и одну поступательную кинематические пары. Все указанные пары имеют пятый класс, поэтому  и
и  . Тогда число степеней свободы манипулятора
. Тогда число степеней свободы манипулятора .
. ,
,  .
. ,
,  ), получим
), получим .
.
 .
. .
. ,
,  )
) .
. ,
, 

 ,
, 
 ,
,  (ветвление поступательное),
(ветвление поступательное),  (ветвление цилиндр-плоскость)
(ветвление цилиндр-плоскость)  (класс поступательной пары – пятый),
(класс поступательной пары – пятый), 
 ,
,  ,
,  ,
,  (один замкнутый контур) и
(один замкнутый контур) и  (четыре одноподвижные кинематические пары). Тогда по формуле Озола:
(четыре одноподвижные кинематические пары). Тогда по формуле Озола:  .
.
 ,
,  ):
):  .
. ,
,  ,
,  ,
,  . Следовательно, введение дополнительных звеньев в схему механизма влечет за собой необходимость точного соблюдения определенных геометрических размеров при изготовлении звеньев.
. Следовательно, введение дополнительных звеньев в схему механизма влечет за собой необходимость точного соблюдения определенных геометрических размеров при изготовлении звеньев.