
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Кинематические пары. Схемы механизмов
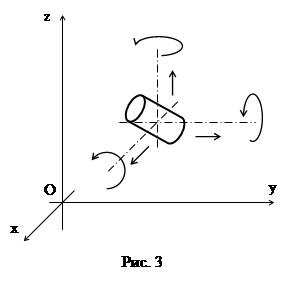
Кинематическая пара – подвижное соединение двух звеньев. Из теоретической механики известно, что твердое тело (рис. 3) в трехмерном пространстве имеет шесть степеней свободы: три поступательных и три вращательных.
Если одно звено соприкасается с другим звеном, то, относительно этого звена оно лишается одной или нескольких степеней свободы. В подвижном соединении одно звено относительно другого может иметь максимум пять степеней свободы, минимум – одну степень свободы. В теории механизмов, вместо принятого в теоретической механике словосочетания «степень свободы», часто используют термин «подвижность» Можно сказать, что в соединении двух звеньев, каждое из этих звеньев накладывает на другое определенное число ограничений относительного перемещения – так называемых связей. Класс кинематической пары определяется числом независимых связей, накладываемых одним звеном на другое в их подвижном соединении. Таким образом, кинематические пары подразделяются на пять классов, а подвижность кинематической пары определяется формулой:
где Sr – класс кинематической пары. Обозначение «r» в формуле указывает на то, что речь идет о связях и подвижностях одного звена относительно другого (лат. Relativus - относительный).
Кинематическая пара называется высшей, если контакт звеньев осуществляется по линии или в точке. Кинематическая пара называется низшей, если звенья соприкасаются по поверхности.
Пример 1
Кинематическая пара шар-плоскость (рис. 4, а) имеет первый класс, так как контакт шара и плоскости в точке A дает только одну связь (Sr = 1). Подвижность пары
Пример 2
Поступательная кинематическая пара (рис. 4, б) имеет пятый класс (
В таблице 1 приведены графические и буквенные обозначения кинематических пар, которые используются при составлении схем механизмов.
Таблица 1
Структурная схема дает представление о структуре механизма (его звеньях и кинематических парах), на ней также указываются направления движений входных и выходных звеньев. Звенья на схеме нумеруются арабскими цифрами, причем стойка всегда обозначается цифрой «0». Проектирование механизма начинается с разработки его структурной схемы. Кинематическая схема является более информативной: она содержит также сведения об основных геометрических размерах звеньев и выполняется в масштабе. Разработка кинематической схемы механизма осуществляется на основе его структурной схемы. Классификация механизмов
Механизмы различаются по функциональному назначению, по конструктивному устройству, по расположению в пространстве, по наличию или отсутствию замкнутых кинематических контуров.
По функциональному назначению механизмы подразделяются на исполнительные, передаточные и программные. · Исполнительные механизмы предназначены для приведения в движение рабочих органов машины в соответствии с выполняемым технологическим процессом. · Передаточные механизмы служат для преобразования механической энергии двигателей в механическую энергию с параметрами, требуемыми для приведения в движение входных звеньев исполнительного механизма. · Программные механизмы задают программу движения механической части машины. Пример
Рассмотрим транспортную машину – автомобиль. Рабочими органами автомобиля являются колеса. Исполнительный механизм – шасси. Коробка передач – многоступенчатый передаточный механизм, необходимый для согласования работы двигателя и шасси в различных режимах движения машины. Двигатель автомобиля содержит газораспределительный механизм, который является программным (он управляет движением впускных и выпускных клапанов двигателя).
По конструктивному устройству различают рычажные, зубчатые, кулачковые и фрикционные механизмы. · Механизм, в котором все кинематические пары низшие, называется рычажным (рис. 5, а). · В зубчатом механизме движение от одного звена к другому передается посредством зубчатого зацепления (рис. 5, б). · Кулачковый механизм содержит звено со сложным профилем, называемое кулачком (рис 5, в). · Во фрикционном механизме движение от одного звена к другому передается за счет сил трения (рис. 5, г; звенья вспомогательного винтового механизма, предназначенного для поджатия колеса 1, не пронумерованы). Механизмы также могут быть комбинированными: например, зубчато-рычажный или зубчато-фрикционный механизмы.
По расположению в пространстве механизмы подразделяются на плоские и пространственные. · Механизм называется плоским, если траектории точек всех его подвижных звеньев находятся в плоскостях, параллельных неподвижной плоскости. На рис. 5 показаны структурные схемы плоских механизмов. · Механизм называется пространственным, если траектории точек его подвижных звеньев лежат в непараллельных плоскостях. На рис. 6 приведена схема пространственного механизма – манипулятора, работающего в сферической системе координат.
Механизм называется замкнутым, если каждое его звено образует, как минимум, две кинематические пары. Если есть хотя бы одно звено, образующее только одну кинематическую пару, механизм – разомкнутый. Механизм называется одноконтурным, если он содержит один замкнутый кинематический контур. Если в механизме имеется более чем один замкнутый контур, то механизм – многоконтурный. На рис. 5 приведены схемы замкнутых одноконтурных механизмов; на рис. 6 – схема разомкнутого механизма, не имеющего замкнутых кинематических контуров.
Контрольные вопросы
1. Что называется кинематической парой? 2. Что называют подвижностями кинематической пары? 3. Как определяется класс кинематической пары? 4. Может ли кинематическая пара иметь класс выше пятого? Обоснуйте свой ответ. 5. Какие кинематические пары называются низшими? Высшими? 6. Чем отличается структурная схема механизма от его кинематической схемы? 7. Перечислите разновидности механизмов по функциональному назначению. 8. Какие механизмы называются рычажными? 9. Чем отличается плоский механизм от пространственного механизма? 10. Сформулируйте условие, в соответствии с которым механизм определяется как замкнутый. 11. Может ли разомкнутый механизм иметь замкнутые кинематические контуры? Обоснуйте свой ответ.
ЛЕКЦИЯ 3
Плоские четырехзвенные рычажные механизмы. Наименования звеньев рычажных механизмов. Степени свободы механизмов. Универсальные структурные формулы. Основные и местные подвижности в механизмах.
Популярное:
|
Последнее изменение этой страницы: 2016-06-05; Просмотров: 3505; Нарушение авторского права страницы
 ,
,  ,
, 
 . Данная кинематическая пара является высшей.
. Данная кинематическая пара является высшей. ) и является одноподвижной. Контакт звеньев в данной кинематической паре осуществляется по поверхностям, поэтому пара – низшая.
) и является одноподвижной. Контакт звеньев в данной кинематической паре осуществляется по поверхностям, поэтому пара – низшая.









