
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Теория механизмов и машин. Общие сведенияСтр 1 из 5Следующая ⇒
ЛЕКЦИЯ 1
Теория механизмов и машин (ТММ): объект изучения, основные понятия, цели и задачи. Основные характеристики механизмов: функции положений, первая и вторая передаточные функции, коэффициент полезного действия (КПД).
Теория механизмов и машин. Общие сведения
Теория механизмов и машин – раздел прикладной механики, в котором изучаются машины и входящие в их состав механизмы. Машина – техническая система, предназначенная для осуществления движений и обеспечения усилий, необходимых для выполнения какого-либо технологического процесса. По функциональному назначению различают транспортные, технологические, энергетические и информационные машины.
· Транспортные машины предназначены для перемещения пассажиров и грузов в пространстве. К ним относятся автомобили, локомотивы, водный и воздушный транспорт, ракеты-носители, подъемно-транспортные машины; роботы-манипуляторы, предназначенные для выполнения транспортных операций. · Технологические машины предназначены для обработки материалов и заготовок с целью получения готовых изделий. К технологическим машинам относится основное оборудование промышленных предприятий: металлообрабатывающие, деревообрабатывающие станки, прокатные станы, кузнечно-прессовые машины, машины литья под давлением и т.п.; роботы-манипуляторы, предназначенные для выполнения основных технологических операций (сварка, сборка, окраска). · Энергетические машины предназначены для преобразования подаваемой к ним энергии одного вида в энергию другого вида, необходимую для выполнения технологического процесса. К ним относятся двигатели и генераторы. · Информационные машины предназначены для преобразования информации. К ним относятся электронные вычислительные машины различных принципов действия, периферийное оборудование ЭВМ (принтеры, плоттеры, дигитайзеры, графопостроители, сканеры и т.п.).
Как сложные системы, машины состоят из следующих функциональных частей: механическая часть, двигатели, источники питания, система управления движением. Механическая часть служит для преобразования механической энергии двигателей в энергию требуемых движений рабочих органов машины. Механическая часть, как правило, состоит из нескольких отдельных механизмов. Двигатели, по принципу действия, могут быть тепловыми (например, двигатели внутреннего сгорания), электрическими, гидравлическими или пневматическими. Источники питания могут быть как автономными, так и стационарными. Система управления движением осуществляет контроль внутреннего состояния машины, управляемых перемещений и состояния внешней среды с помощью датчиков, информация с которых подается на входы вычислительной системы, управляющей энергией источников питания машины. Современные машины, системы управления движением которых построены на основе микропроцессорных средств, образуют особый класс машин – мехатронные системы. В ТММ изучаются теоретические основы строения, функционирования и проектирования механизмов и машин, разрабатываются инженерные методы анализа и синтеза механизмов, которые позволяют проектировать новые машины, отвечающие всему комплексу требований задания на проектирование (технических, эксплуатационных, экономических, эргономических, экологических). Анализ любого сложного объекта состоит в том, чтобы выявить свойства и особенности объекта путем его расчленения на более простые составляющие. Под синтезом, наоборот, подразумевается создание сложного объекта, обладающего заданными характеристиками, из некоторого числа элементов с заранее известными свойствами. В теории механизмов решаются задачи структурного, кинематического, динамического (силового), а также точностного анализа и синтеза механизмов.
ЛЕКЦИЯ 2
Понятие кинематической пары и классификация кинематических пар. Условные обозначения звеньев и кинематических пар на схемах механизмов. Структурная и кинематическая схемы механизма. Классификация механизмов.
Классификация механизмов
Механизмы различаются по функциональному назначению, по конструктивному устройству, по расположению в пространстве, по наличию или отсутствию замкнутых кинематических контуров.
По функциональному назначению механизмы подразделяются на исполнительные, передаточные и программные. · Исполнительные механизмы предназначены для приведения в движение рабочих органов машины в соответствии с выполняемым технологическим процессом. · Передаточные механизмы служат для преобразования механической энергии двигателей в механическую энергию с параметрами, требуемыми для приведения в движение входных звеньев исполнительного механизма. · Программные механизмы задают программу движения механической части машины. Пример
Рассмотрим транспортную машину – автомобиль. Рабочими органами автомобиля являются колеса. Исполнительный механизм – шасси. Коробка передач – многоступенчатый передаточный механизм, необходимый для согласования работы двигателя и шасси в различных режимах движения машины. Двигатель автомобиля содержит газораспределительный механизм, который является программным (он управляет движением впускных и выпускных клапанов двигателя).
По конструктивному устройству различают рычажные, зубчатые, кулачковые и фрикционные механизмы. · Механизм, в котором все кинематические пары низшие, называется рычажным (рис. 5, а). · В зубчатом механизме движение от одного звена к другому передается посредством зубчатого зацепления (рис. 5, б). · Кулачковый механизм содержит звено со сложным профилем, называемое кулачком (рис 5, в). · Во фрикционном механизме движение от одного звена к другому передается за счет сил трения (рис. 5, г; звенья вспомогательного винтового механизма, предназначенного для поджатия колеса 1, не пронумерованы). Механизмы также могут быть комбинированными: например, зубчато-рычажный или зубчато-фрикционный механизмы.
По расположению в пространстве механизмы подразделяются на плоские и пространственные. · Механизм называется плоским, если траектории точек всех его подвижных звеньев находятся в плоскостях, параллельных неподвижной плоскости. На рис. 5 показаны структурные схемы плоских механизмов. · Механизм называется пространственным, если траектории точек его подвижных звеньев лежат в непараллельных плоскостях. На рис. 6 приведена схема пространственного механизма – манипулятора, работающего в сферической системе координат.
Механизм называется замкнутым, если каждое его звено образует, как минимум, две кинематические пары. Если есть хотя бы одно звено, образующее только одну кинематическую пару, механизм – разомкнутый. Механизм называется одноконтурным, если он содержит один замкнутый кинематический контур. Если в механизме имеется более чем один замкнутый контур, то механизм – многоконтурный. На рис. 5 приведены схемы замкнутых одноконтурных механизмов; на рис. 6 – схема разомкнутого механизма, не имеющего замкнутых кинематических контуров.
Контрольные вопросы
1. Что называется кинематической парой? 2. Что называют подвижностями кинематической пары? 3. Как определяется класс кинематической пары? 4. Может ли кинематическая пара иметь класс выше пятого? Обоснуйте свой ответ. 5. Какие кинематические пары называются низшими? Высшими? 6. Чем отличается структурная схема механизма от его кинематической схемы? 7. Перечислите разновидности механизмов по функциональному назначению. 8. Какие механизмы называются рычажными? 9. Чем отличается плоский механизм от пространственного механизма? 10. Сформулируйте условие, в соответствии с которым механизм определяется как замкнутый. 11. Может ли разомкнутый механизм иметь замкнутые кинематические контуры? Обоснуйте свой ответ.
ЛЕКЦИЯ 3
Плоские четырехзвенные рычажные механизмы. Наименования звеньев рычажных механизмов. Степени свободы механизмов. Универсальные структурные формулы. Основные и местные подвижности в механизмах.
Местные подвижности
Местными подвижностями называются степени свободы механизма, не оказывающие влияния на передачу основного движения. Рассмотрим механизм (Рис. 9). По формуле Сомова – Малышева число его степеней свободы (
То есть, этот механизм не только существует как пространственный, но еще имеет две степени свободы. Одна степень свободы здесь является основной подвижностью, необходимой для передачи движения от звена 1 к звену 3. Вторая степень свободы (вращение шатуна 2 вокруг собственной оси) не влияет на передачу основного движения, поэтому является местной подвижностью. В общем случае, механизм может иметь как основные, так и местные подвижности: его число степеней свободы определяется равенством:
где WO – число основных, WМ – число местных подвижностей. Местные подвижности часто предусматривают в механизмах с целью обеспечения более благоприятного распределения нагрузки на звенья и равномерного изнашивания контактирующих поверхностей. При необходимости, местные подвижности можно устранить, повысив класс соответствующих кинематических пар.
Контрольные вопросы
1. Перечислите наиболее часто используемые плоские четырехзвенные рычажные механизмы. Приведите примеры машин или приборов, в которых есть такие механизмы. 2. Чем отличается кривошип от коромысла? Коромысло от кулисы? 3. Что называют степенью свободы механизма? 4. Чем отличается механизм от конструкции? 5. Что означает множитель «6» в структурной формуле Сомова - Малышева? 6. Для каких механизмов используется структурная формула Чебышева? 7. Какие механизмы называют клиновыми? Какую структурную формулу следует использовать для расчета степеней свободы клинового механизма? 8. Что называют местной подвижностью? 9. С какой целью местные подвижности предусматривают в механизмах? 10. Как можно устранить местную подвижность?
ЛЕКЦИЯ 4
Избыточные связи в механизмах. Классификация, выявление и устранение избыточных связей. Принцип строения рычажных механизмов. Классификация структурных групп.
Избыточные связи
Избыточными называют такие связи, которые не накладывают новых ограничений на перемещения звеньев механизма, а только повторяют уже существующие. Избыточные связи могут быть как в отдельных кинематических парах, так и на уровне механизма в целом. Различают избыточные связи трех типов: А, Б и В (по предложению профессора Озола).
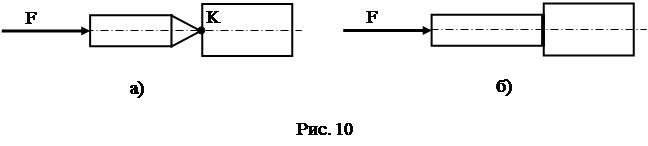
Избыточные связи типа А имеют место в отдельных кинематических парах. Для передачи усилия от одного звена к другому теоретически достаточно контакта в одной точке (Рис. 10, а). Если передача усилия обеспечивается поверхностным контактом, то соприкосновение звеньев во всех точках поверхности, кроме одной, будет образовывать избыточные связи типа А (Рис. 10, б).
Избыточные связи типа А являются полезными, когда требуется передача значительных усилий, поскольку звенья реальных механизмов не являются абсолютно твердыми, и в случае точечного контакта при большой силовой нагрузке будут иметь место существенные деформации, возможно также разрушение звеньев в зоне их соприкосновения. В отдельных случаях связи типа А являются вредными и устраняются. Например, кинематическая пара цилиндр-поршень в двигателе внутреннего сгорания будет работоспособной, если поверхностный контакт поршня с цилиндром заменить линейным контактом цилиндра с компрессионными кольцами (Рис. 11).
Избыточные связи типа Б имеют место в кинематических парах с ветвлением. Число избыточных связей типа Б рассчитывается по формуле:
где i - индекс ветвления пары, Si – число независимых связей в i – той ветви, S – класс кинематической пары.
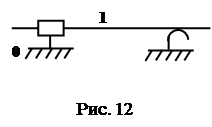
Пример
На рис. 12 изображена поступательная кинематическая пара с двумя ветвлениями.
Рассчитаем число избыточных связей типа Б:
Избыточные связи типа Б увеличивают жесткость кинематической пары, но требуют повышенной точности изготовления звеньев и сборки пары.
Избыточные связи типа В образуются при замыкании кинематических цепей в контуры, отсюда их второе название – контурные избыточные связи. Их число определяется по формуле Озола:
где W – число степеней свободы механизма, k – число замкнутых кинематических контуров, f – суммарное число степеней свободы кинематических пар механизма. Для плоского механизма число контурных избыточных связей может быть также найдено по формуле Малышева:
где WЧ – число степеней свободы механизма, рассчитанное по формуле Чебышева, WСМ – число степеней свободы того же механизма, рассчитанное по формуле Сомова – Малышева.
Задача
Определить число избыточных связей в плоском шарнирном четырехзвенном механизме (Рис. 7, а).
Решение
Для данного механизма
Механизм имеет три контурные избыточные связи, что и было отмечено в Задаче 2 п. 3.2.
Контурные избыточные связи увеличивают жесткость механизма, но требуют повышенной точности изготовления звеньев и сборки механизма. При необходимости, они могут быть устранены путем понижения класса одной или нескольких кинематических пар.
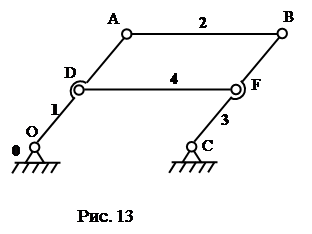
Избыточные связи могут быть также привнесены в механизм путем введения в его схему дополнительных звеньев. Рассмотрим механизм сдвоенного параллелограмма (рис. 13).
Здесь дополнительное звено – шатун 4. Так как механизм плоский, рассчитаем его число степеней свободы по формуле Чебышева (
Полученный результат означает, что с точки зрения структурного строения, рассматриваемая система механизмом не является. Для того чтобы возникла одна степень свободы, требуется соблюдение геометрических условий:
ЛЕКЦИЯ 5
Структурный анализ механизма и порядок его выполнения. Принцип образования рычажных механизмов. Структурные модификации механизма. Синтез структурных модификаций. Кинематический анализ механизма. Графические и аналитические методы кинематического анализа: достоинства и недостатки.
ЛЕКЦИЯ 6
Графический и аналитический методы определения функции положения механизма. Методы графического дифференцирования.
ЛЕКЦИЯ 7
Теоретические основы метода векторных планов. Вычисление скоростей и ускорений звеньев плоского механизма методом векторных планов. Использование понятий мгновенного центра скоростей и мгновенного центра ускорений в решении задач кинематического анализа плоских механизмов.
7.1. Метод векторных планов
Некоторые физические величины, характеризующие состояние исследуемой системы, могут быть математически представлены в виде направленных отрезков (векторов). Например, векторными величинами являются скорости и ускорения точек механической системы, силы, приложенные к системе, переменные ток и напряжение в электрической цепи и т.п. В подобных случаях процессы, протекающие в системе, описываются векторными уравнениями. Если векторы, входящие в уравнения, находятся в одной и той же плоскости, то уравнения могут быть решены путем геометрических построений векторов на плоскости в заранее принятом масштабе. В этом заключается идея метода векторных планов. Когда требуется вычислить скорости и ускорения звеньев плоского механизма в каких-либо его положениях, метод векторных планов является удобным и часто применяется на практике. Как известно из теоретической механики, скорость и ускорение любой точки твердого тела, совершающего плоское движение (Рис. 27), могут быть найдены с помощью векторных уравнений:
где
где ω, ε – угловые скорость и ускорение тела.
Векторные планы, соответствующие векторным уравнениям скоростей и ускорений, представлены на рис. 28.
Таким образом, выполнив графически сложение векторов и измерив на планах отрезки, соответствующие скорости
Задача
Решение
Стержень AB изображенного на рисунке четырехзвенного механизма совершает плоское движение, а стержни OA и O1B вращаются вокруг неподвижных центров O и O1. Найдем скорость шарнира A:
Вектор
причем направление Найдем ускорение шарнира A. Так как этот шарнир движется вокруг неподвижной точки O, то для его ускорения справедливо равенство:
где
где
Неизвестные по величине векторы Составляющую результирующего ускорения
ЛЕКЦИЯ 1
Теория механизмов и машин (ТММ): объект изучения, основные понятия, цели и задачи. Основные характеристики механизмов: функции положений, первая и вторая передаточные функции, коэффициент полезного действия (КПД).
Теория механизмов и машин. Общие сведения
Теория механизмов и машин – раздел прикладной механики, в котором изучаются машины и входящие в их состав механизмы. Машина – техническая система, предназначенная для осуществления движений и обеспечения усилий, необходимых для выполнения какого-либо технологического процесса. По функциональному назначению различают транспортные, технологические, энергетические и информационные машины.
· Транспортные машины предназначены для перемещения пассажиров и грузов в пространстве. К ним относятся автомобили, локомотивы, водный и воздушный транспорт, ракеты-носители, подъемно-транспортные машины; роботы-манипуляторы, предназначенные для выполнения транспортных операций. · Технологические машины предназначены для обработки материалов и заготовок с целью получения готовых изделий. К технологическим машинам относится основное оборудование промышленных предприятий: металлообрабатывающие, деревообрабатывающие станки, прокатные станы, кузнечно-прессовые машины, машины литья под давлением и т.п.; роботы-манипуляторы, предназначенные для выполнения основных технологических операций (сварка, сборка, окраска). · Энергетические машины предназначены для преобразования подаваемой к ним энергии одного вида в энергию другого вида, необходимую для выполнения технологического процесса. К ним относятся двигатели и генераторы. · Информационные машины предназначены для преобразования информации. К ним относятся электронные вычислительные машины различных принципов действия, периферийное оборудование ЭВМ (принтеры, плоттеры, дигитайзеры, графопостроители, сканеры и т.п.).
Как сложные системы, машины состоят из следующих функциональных частей: механическая часть, двигатели, источники питания, система управления движением. Механическая часть служит для преобразования механической энергии двигателей в энергию требуемых движений рабочих органов машины. Механическая часть, как правило, состоит из нескольких отдельных механизмов. Двигатели, по принципу действия, могут быть тепловыми (например, двигатели внутреннего сгорания), электрическими, гидравлическими или пневматическими. Источники питания могут быть как автономными, так и стационарными. Система управления движением осуществляет контроль внутреннего состояния машины, управляемых перемещений и состояния внешней среды с помощью датчиков, информация с которых подается на входы вычислительной системы, управляющей энергией источников питания машины. Современные машины, системы управления движением которых построены на основе микропроцессорных средств, образуют особый класс машин – мехатронные системы. В ТММ изучаются теоретические основы строения, функционирования и проектирования механизмов и машин, разрабатываются инженерные методы анализа и синтеза механизмов, которые позволяют проектировать новые машины, отвечающие всему комплексу требований задания на проектирование (технических, эксплуатационных, экономических, эргономических, экологических). Анализ любого сложного объекта состоит в том, чтобы выявить свойства и особенности объекта путем его расчленения на более простые составляющие. Под синтезом, наоборот, подразумевается создание сложного объекта, обладающего заданными характеристиками, из некоторого числа элементов с заранее известными свойствами. В теории механизмов решаются задачи структурного, кинематического, динамического (силового), а также точностного анализа и синтеза механизмов.
Популярное:
|
Последнее изменение этой страницы: 2016-06-05; Просмотров: 1137; Нарушение авторского права страницы


 ,
,  ,
,  )
) .
. ,
, 

 ,
, 
 ,
,  (ветвление поступательное),
(ветвление поступательное),  (ветвление цилиндр-плоскость)
(ветвление цилиндр-плоскость)  (класс поступательной пары – пятый),
(класс поступательной пары – пятый), 
 ,
,  ,
,  ,
,  (один замкнутый контур) и
(один замкнутый контур) и  (четыре одноподвижные кинематические пары). Тогда по формуле Озола:
(четыре одноподвижные кинематические пары). Тогда по формуле Озола:  .
.
 ,
,  ):
):  .
. ,
,  ,
,  ,
,  . Следовательно, введение дополнительных звеньев в схему механизма влечет за собой необходимость точного соблюдения определенных геометрических размеров при изготовлении звеньев.
. Следовательно, введение дополнительных звеньев в схему механизма влечет за собой необходимость точного соблюдения определенных геометрических размеров при изготовлении звеньев.
 ,
,  ,
,  - векторы абсолютных скорости и ускорения точки А тела,
- векторы абсолютных скорости и ускорения точки А тела,  - вектор скорости точки B относительно точки A,
- вектор скорости точки B относительно точки A,  - векторы нормального и тангенциального (касательного) ускорений точки B относительно точки A. Модули векторов
- векторы нормального и тангенциального (касательного) ускорений точки B относительно точки A. Модули векторов  ,
,  ,
,  ,
, 
 и ускорению
и ускорению  , получаем информацию о направлениях и величинах векторов
, получаем информацию о направлениях и величинах векторов 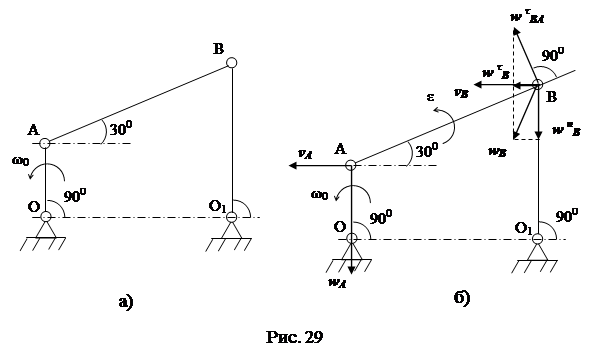 Стержень OA шарнирного четырехзвенного механизма (рис. 29, а) вращается с постоянной угловой скоростью ω 0. Определить угловую скорость, угловое ускорение стержня AB, а также ускорение шарнира B в положении, указанном на рисунке, если AB = 2OA = 2a.
Стержень OA шарнирного четырехзвенного механизма (рис. 29, а) вращается с постоянной угловой скоростью ω 0. Определить угловую скорость, угловое ускорение стержня AB, а также ускорение шарнира B в положении, указанном на рисунке, если AB = 2OA = 2a. .
. перпендикулярен OA и направлен в сторону вращения стержня OA (рис. 18). Для скорости шарнира B справедливо равенство:
перпендикулярен OA и направлен в сторону вращения стержня OA (рис. 18). Для скорости шарнира B справедливо равенство:  ,
,  , согласно положению механизма, будет то же, что и у
, согласно положению механизма, будет то же, что и у  ,
,  ,
,  , т.е. стержень AB совершает мгновенно-поступательное движение.
, т.е. стержень AB совершает мгновенно-поступательное движение. ,
,  - нормальное ускорение, направленное от точки A к центру вращения O;
- нормальное ускорение, направленное от точки A к центру вращения O;  , т.к.
, т.к.  . В данном случае
. В данном случае  . Для ускорения шарнира B справедливо равенство:
. Для ускорения шарнира B справедливо равенство:  ,
,  - нормальное ускорение шарнира B в его движении вокруг неподвижной точки O1;
- нормальное ускорение шарнира B в его движении вокруг неподвижной точки O1;  - нормальное ускорение шарнира B относительно точки A.
- нормальное ускорение шарнира B относительно точки A.
 определим, построив план ускорений. Для этого из произвольной точки pw, называемой полюсом плана ускорений, отложим отрезок pwa,, отображающий ускорение
определим, построив план ускорений. Для этого из произвольной точки pw, называемой полюсом плана ускорений, отложим отрезок pwa,, отображающий ускорение  (рис. 30, а). Тогда, проводя через точку a прямую, перпендикулярную AB, получим направление тангенциального ускорения
(рис. 30, а). Тогда, проводя через точку a прямую, перпендикулярную AB, получим направление тангенциального ускорения  .
. отложим из полюса pw в виде отрезка pwb*, длина которого вдвое меньше pwa. Замкнем план ускорений прямой, перпендикулярной стержню O1B и задающей направление
отложим из полюса pw в виде отрезка pwb*, длина которого вдвое меньше pwa. Замкнем план ускорений прямой, перпендикулярной стержню O1B и задающей направление  . На пересечении двух перпендикуляров получим точку b. Отрезок pwb будет отображать ускорение
. На пересечении двух перпендикуляров получим точку b. Отрезок pwb будет отображать ускорение  шарнира B, а отрезок ab – ускорение
шарнира B, а отрезок ab – ускорение  - ускорение шарнира B;
- ускорение шарнира B;  ,
,  - угловое ускорение стержня AB. Направления всех вычисленных скоростей и ускорений точек механизма изображены на рис. 29, б.
- угловое ускорение стержня AB. Направления всех вычисленных скоростей и ускорений точек механизма изображены на рис. 29, б.