
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
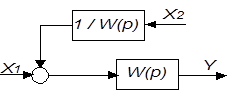
Встречно-параллельное соединение звеньев
Рис. 4.4. Алгоритмические схемы встречно-параллельного соединения звеньев (а) и эквивалентного ему звена (б)
Передаточная функция соединения
Но при этом
Здесь WП(p) и WОС (p) – передаточные функции соответственно прямой цепи и цепи обратной связи встречно-параллельного соединения звеньев. После деления обеих частей равенства (4.4) на X(p) получаем
Учитывая соотношение (4.3) в равенстве (4.5), последнее приводим к виду
Решая уравнение (4.6) находим искомую передаточную функцию эквивалентного звена
При отрицательной обратной связи передаточная функция эквивалентного звена
При положительной обратной связи передаточная функция эквивалентного звена
С помощью рассмотренных правил удается преобразовать (упростить) к простейшему виду (рис.4.4, б) любую алгоритмическую схему, не содержащую перекрестных связей между звеньями. Если же схема многоконтурная и содержит перекрестные связи, то эти правила можно применять лишь после устранения этих перекрестных связей. Для устранения перекрестных связей следует использовать ряд вспомогательных правил преобразований алгоритмических схем, которые приведены в табл. 4.1. Таблица 4.1 Вспомогательные правила преобразования алгоритмических схем
Пример применения правил преобразования алгоритмических схем Преобразовать алгоритмическую схему АСУ (рис. 4.5, а), содержащую звенья с известными передаточными функциями, к схеме с одним эквивалентным звеном. В табл. 4.2 приведена: информация после каждой операции преобразования. Таблица 4.2 Операции преобразования
Рис. 4.5. Алгоритмические схемы АСУ
Рис. 4.6. Алгоритмические схемы АСУ 4.3. Передаточные функции типовой одноконтурной АСУ Под типовой одноконтурной АСУ будем понимать систему, обобщенная функциональная схема которой приведена на рис. 1.6, в. Ей соответствует обобщенная алгоритмическая схема (рис. 4.7). Объект управления характеризуется одной управляемой переменной X(p), которую требуется стабилизировать на заданном уровне XЗ(p). На стабилизируемую переменную X(p) влияет возмущение XВ(p). Отклонение стабилизируемой переменной X(p), вызываемое этим возмущением компенсируется в системе целенапрвленными изменениями управляющего воздействия Y(p), которое создается регулятором (управляющим устройством). На входе регулятора с передаточной функцией WР(p) действует сигнал рассогласования (ошибки) e(p). Этот сигнал формируется в результате сравнения (алгебраического суммирования) задающего воздействия XЗ(p) и управляемой величины X(p),
Составим передаточные функции и уравнение динамики (движения) типовой одноконтурной АСУ, алгоритмическая схема которой приведена на рис. 4.7.
Рис. 4.7. Обобщенная алгоритмическая схема АСУ
Передаточная функция АСУ по задающему воздействию - передаточная функция преобразованной разомкнутой АСУ с одним звеном при возмущающем воздействии XВ(p) = 0 (рис. 4.8). Она имеет вид
Рис. 4.8. Алгоритмическая схема АСУ для определения ее передаточной функции по задающему воздействию
Передаточная функция АСУ по возмущающему воздействию - передаточная функция преобразованной разомкнутой АСУ с одним звеном при задающем воздействии XЗ(p) = 0 (рис. 4.9).
Она имеет вид
Рис. 4.9. Алгоритмическая схема АСУ для определения ее передаточной функции по возмущающему воздействию
Согласно принципу наложения общее изменение выходной величины X(p), возникающее при совместном действии входных воздействий XЗ(p) и XВ(p), равно сумме изменений, создаваемых каждым воздействием в отдельности. Отсюда уравнение динамики АСУ в краткой записи
или в развернутом виде
4.4. Типовые алгоритмы управления в линейных АСУ
Алгоритм управления (регулирования) в АСУ устанавливает связь ошибки e(p) и управляющего воздействия Y(p), Эта связь в типовой одноконтурной АСУ (рис. 4.7) определяется передаточной функцией регулятора
В линейных АСУ применяются следующие типовые алгоритмы управления (регулирования): · пропорциональный (П) алгоритм; · интегральный (И) алгоритм; · пропорционально-интегральный (ПИ) алгоритм; · пропорционально-дифференциальный (ПД) алгоритм; · пропорционально-дифференциально-интегральный (ПИД) алгоритм;
Популярное:
|
Последнее изменение этой страницы: 2016-07-12; Просмотров: 1092; Нарушение авторского права страницы

 (4.3)
(4.3) (4.4)
(4.4) (4.5)
(4.5) (4.6)
(4.6) (4.7)
(4.7)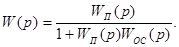 (4.8)
(4.8) (4.9)
(4.9)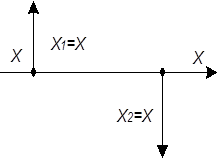





















 (4.10)
(4.10)
 (4.11)
(4.11)
 (4.12)
(4.12)

 (4.13)
(4.13)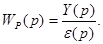 (4.14)
(4.14)