|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯСтр 1 из 10Следующая ⇒
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Конспект лекций
ВВЕДЕНИЕ
Вы узнаете: · Что такое теория автоматического управления (ТАУ). · Что является объектом, предметом и целью изучения ТАУ. · Каков основной метод исследования в ТАУ. · Каково место ТАУ среди других наук. · Какова история ТАУ. · Почему актуально изучение ТАУ. · Каковы современные тенденции в автоматизации производства.
Что такое теория автоматического управления? Понятие ТАУ аккумулирует входящие в ее название термины: · теория – совокупность знаний, позволяющих при определенных условиях получать достоверный результат · управление – воздействие, оказываемое на объект, для достижения определенной цели; · автоматическое управление – управление без вмешательства человека с помощью технических средств. Поэтому ТАУ – совокупность знаний, позволяющих создавать и вводить в действие автоматические системы управления технологическими процессами с заданными характеристиками.
Что является объектом, предметом и целью изучения ТАУ? Объект изучения ТАУ – автоматическая система управления (АСУ). Предмет изучения ТАУ – процессы, протекающие в АСУ. Цель изучения ТАУ – учет приобретенных знаний в практической деятельности при проектировании, производстве, монтаже, наладке и эксплуатации АСУ.
Основной метод исследования в ТАУ. При изучении процессов управления в ТАУ абстрагируются от физических и конструктивных особенностей АСУ и вместо реальных АСУ рассматривают их адекватные математические модели. Поэтому основным методом исследования в ТАУ является математическое моделирование. Место ТАУ среди других наук. ТАУ вместе с теорией функционирования элементов систем управления (датчиков, регуляторов, исполнительных механизмов) образует более широкую отрасль науки – автоматику. Автоматика, в свою очередь, является одним из разделов технической кибернетики. Техническая кибернетика изучает сложные автоматизированные системы управления технологическими процессами (АСУТП) и предприятиями (АСУП), построенными с использованием управляющих электронных вычислительных машин.
История ТАУ. Первые теоретические работы в области автоматического управления появились в конце XIX в., когда в промышленности получили широкое распространение регуляторы паровых машин, инженеры-практики стали сталкиваться с трудностями при проектировании и наладке этих регуляторов. Именно в этот период выполнены ряд исследований, в которых впервые паровая машина и ее регулятор были проанализированы математическими методами как единая динамическая система. Приблизительно до середины 20-го столетия теория регуляторов паровых машин и котлов развивалась как раздел прикладной механики. Параллельно разрабатывались методы анализа и расчета автоматических устройств в электротехнике. Формирование ТАУ в самостоятельную научную и учебную дисциплину произошло в период с 1940 по 1950 годы. В это время были изданы первые монографии и учебники, в которых автоматические устройства различной физической природы рассматривались едиными методами. В настоящее время ТАУ наряду с новейшими разделами так называемой общей теории управления (исследование операций, системотехника, теория игр, теория массового обслуживания) играет важную роль в совершенствовании и автоматизации управления производством.
Почему актуально изучение ТАУ? Автоматизация является одним из главных направлений научно-технического прогресса и важным средством повышения эффективности производства. Современное промышленное производство характеризуется ростом масштабов и усложнением технологических процессов, увеличением единичной мощности отдельных агрегатов и установок, применением интенсивных, высокоскоростных режимов, близких к критическим, повышением требований к качеству продукции, безопасности персонала, сохранности оборудования и окружающей среды. Экономичное, надежное и безопасное функционирование сложных технических объектов может быть обеспечено с помощью лишь самых совершенных технических средств, разработка, изготовление, монтаж, наладка и эксплуатация которых немыслемы без знания ТАУ.
Современные тенденции в автоматизации производства. Современными тенденциями в автоматизации производства являются: - широкое применение ЭВМ для управления; - создание машин и оборудования со встроенными микропроцессорными средствами измерения, контроля и регулирования; - переход на децентрализованные (распределенные) структуры управления с микроЭВМ; - внедрение человеко-машинных систем; - использование высоконадежных технических средств; - автоматизированное проектирование систем управления. 1. ОБЩИЕ ПРИНЦИПЫ ПОСТРОЕНИЯ АСУ
Вы познакомитесь: · С основными понятиями и определениями. · Со структурой АСУ. · С классификацией АСУ.
1.1. Основные понятия и определения
Алгоритм функционирования устройства (системы) – совокупность предписаний, ведущих к правильному выполнению технического процесса в каком-либо устройстве или в совокупности устройств (системе). Например, электрическая система – совокупность устройств, обеспечивающих единство процессов генерирования, преобразования, передачи, распределения и потребления электрической энергии при обеспечении ряда требований к режимным параметрам (частоте, напряжению, мощности и т.д.). Электрическая система спроектирована таким образом, чтобы при нормальных условиях эксплуатации эти требования выполнялись, то есть правильно выполнялся технический процесс. В данном случае алгоритм функционирования электрической системы реализован в конструкции входящих в ее состав устройств (генераторов, трансформаторов, линий электропередачи и т.д.) и в определенной схеме их соединения. Однако надлежащему функционированию устройства (системы) могут мешать внешние обстоятельства (воздействия). Например, для электрической системы такими воздействиями могут быть: изменение нагрузки потребителей электрической энергии, изменение конфигурации электрической сети в результате переключений, короткие замыкания, обрывы проводов и т.д. Поэтому на устройство (систему) приходится оказывать специальные воздействия, направленные на компенсацию нежелательных последствий внешних воздействий и выполнение алгоритма функционирования. В связи с этим вводятся следующие понятия: Объект управления (ОУ) – устройство (система), осуществляющее технический процесс и нуждающееся в специально организованных воздействиях извне для осуществления его алгоритма функционирования. Объектами управления являются, например, как отдельные устройства электрической системы (турбогенераторы, силовые преобразователи электрической энергии, нагрузки), так и электрическая система в целом. Алгоритм управления – совокупность предписаний, определяющая характер воздействий извне на объект управления, обеспечивающих его алгоритм функционирования. Примерами алгоритмов управления являются алгоритмы изменения возбуждения синхронного генератора и расхода пара в их турбинах с целью компенсации нежелательного влияния изменения нагрузки потребителей на уровни напряжения в узловых точках электрической системы и частоту этого напряжения. Устройство управления (УУ) – устройство, осуществляющее в соответствии с алгоритмом управления воздействие на объект управления. Примерами устройств управления являются автоматический регулятор возбуждения (АРВ) и автоматический регулятор частоты вращения (АРЧВ) синхронного генератора. Автоматическая система управления (АСУ) – совокупность взаимодействующих между собой объекта управления и устройства управления. Таковой, например, является автоматическая система возбуждения синхронного генератора, содержащая взаимодействующие между собой АРВ и собственно синхронный генератор.
На рис. 1.1. приведена обобщенная структурная схема АСУ.
Рис. 1.1. Обобщенная структурная схема АСУ
В ней: x(t) – управляемая величина – физическая величина, характеризующая состояние объекта. Часто объект управления имеет несколько управляемых величин x1(t), x2(t)… xn(t), тогда говорят об n-мерном векторе состояния объекта x(t)с перечисленными выше компонентами. Объект управления в этом случае называют многомерным. Примерами управляемых величин в электрической системе являются: ток, напряжение, мощность, частота вращения и т.д. zо(t), zд(t) – соответственно основное (действующее на объект управления ) и дополнительное ( действующее на устройство управления ) возмущающие воздействия. Примерами основного возмущающего воздействия zо(t) являются изменение нагрузки синхронного генератора, температуры охлаждающей его среды и т.п., а дополнительного возмущающего воздействия zд(t) – изменение условий охлаждения УУ, нестабильность напряжения источников питания УУ и т.п. Рис. 1.2. Структура автоматической системы управления Рис. 1.3. Функциональная схема АСУ
Алгоритмическая структура (схема) – структура (схема), представляющая собой совокупность взаимосвязанных алгоритмических звеньев и характеризующая алгоритмы преобразования информации в АСУ. При этом, алгоритмическое звено - часть алгоритмической структуры АСУ, соответствующая определенному математическому или логическому алгоритму преобразования сигнала. Если алгоритмическое звено выполняет одну простейшую математическую или логическую операцию, то его называют элементарным алгоритмическим звеном. На схемах алгоритмические звенья изображают прямоугольниками, внутри которых записывают соответствующие операторы преобразования сигналов. Иногда вместо операторов в формульном виде приводят графики зависимости выходной величины от входной или графики переходных функций. Различают следующие виды алгоритмических звеньев: · статическое; · динамическое; · арифметическое; · логическое. Статическое звено – звено, преобразующее входной сигнал в выходной мгновенно (без инерции). Связь между входным и выходным сигналами статического звена описывается обычно алгебраической функцией. К статическим звеньям относятся различные безинерционные преобразователи, например, резистивный делитель напряжения. На рис.1.4, а показано условное изображение статического звена на алгоритмической схеме. Динамическое звено – звено, преобразующее входной сигнал в выходной в соответствии с операциями интегрирования и дифференцирования во времени. Связь между входным и выходным сигналами динамического звена описывается обыкновенными дифференциальными уравнениями. К классу динамических звеньев относятся элементы АСУ, обладающие способностью накапливать какой-либо вид энергии или вещества, например, интегратор на основе электрического конденсатора. Арифметическое звено – звено, осуществляющее одну из арифметических операций: суммирование, вычитание, умножение, деление. Наиболее часто встречающееся в автоматике арифметическое звено – звено, выполняющее алгебраическое суммирование сигналов, называют сумматором. Логическое звено – звено, выполняющее какую-либо логическую операцию: логическое умножение («И»), логическое сложение («ИЛИ»), логическое отрицание («НЕ») и т.д. Входной и выходной сигналы логического звена являются обычно дискретными и рассматриваются как логические переменные. На рис.1.4 показаны условные изображения элементарных алгоритмических звеньев.
Рис 1.4. Условные изображения элементарных алгоритмических звеньев: а– статическое; б – динамическое; в – арифметическое; г – логическое
Конструктивная структура (схема) – структура (схема), отражающая конкретное схемное, конструктивное и прочее исполнение АСУ. К конструктивным схемам относятся: кинематические схемы устройств, принципиальные и монтажные схемы электрические соединений и т. д. Так как ТАУ имеет дело с математическими моделями АСУ, то конструктивные схемы интересуют в значительно меньшей степени чем функциональные и алгоритмические.
1.3. Классификация АСУ
Классификация АСУ может быть осуществлена по различным принципам и признакам, характеризующим назначение и конструкцию систем, вид применяемой энергии, используемые алгоритмы управления и функционирования и т.д. Рассмотрим первоначально классификацию АСУ по наиболее важным для теории управления признакам, которые характеризуют алгорим функционирования и алгоритм управления АСУ. В зависимости от характера изменения задающего воздействия во времени АСУ разделяют на три класса: · стабилизирующие; · программные; · следящие. Стабилизирующая АСУ – система, алгоритм функционирования которой содержит предписание поддерживать значение управляемой величины постоянным: x(t) » xз = const. (1.3) Знак » означает, что управляемая величина поддерживается на заданном уровне с некоторой ошибкой. Стабилизирующие АСУ самые распространенные в промышленной автоматике. Их применяют для стабилизации различных физических величин, характеризующих состояние технологических объектов. Примером стабилизирующей АСУ является система регулирования возбуждения синхронного генератора (см. рис. 1.2). Программная АСУ – система, алгоритм функционирования которой содержит предписание изменять управляемую величину в соответствии с заранее заданной функцией времени: x(t) » xз(t) = fп(t). (1.4)
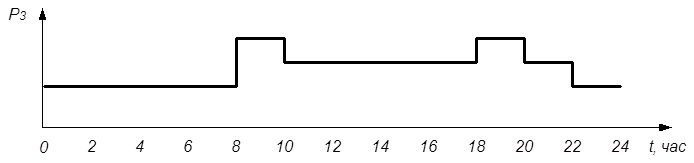
Рис. 1.5. Закон изменения задания активной мощности
Следящая АСУ –система, алгоритм функционирования которой содержит предписание изменять управляемую величину в соответствии с заранее неизвестной функцией времени: x(t) » xз(t) = fс(t). (1.5) Примером следящей АСУ является система управления активной мощностью нагрузки синхронного генератора на электрической станции в течение суток. Управляемой величиной в системе служит активная мощность нагрузки Р генератора. Закон изменения задания активной мощности Рз (задающего воздействия) определяется, например, диспетчером энергосистемы и имеет неопределенный характер в течение суток. В стабилизирующих, программных и следящих АСУ цель управления заключается в обеспечении равенства или близости управляемой величины x(t) к ее заданному значению xз(t). Такое управление, осуществляемое с целью поддержания x(t) » xз(t), (1.6) называется регулированием. Управляющее устройство, осуществляющее регулирование, называется регулятором, а сама система – системой регулирования. В зависимости от конфигурации цепи воздействий различают три вида АСУ: · с разомкнутой цепью воздействий (разомкнутая система); · с замкнутой цепью воздействий (замкнутая система); · с комбинированной цепью воздействий (комбинированная система). Разомкнутая АСУ – система, в которой не осуществляется контроль управляемой величины, т.е. входными воздействиями ее управляющего устройства являются только внешние (задающее и возмущающее) воздействия. Разомкнутые АСУ можно разделить в свою очередь на два типа: · осуществляющие управление в соответствии с изменением только задающего воздействия (рис. 1.6, а); · осуществляющие управление в соответствии с изменением и задающего и возмущающего воздействий (рис. 1.6, б). Рис. 2.1. Виды сигналов
При исследовании АСУ и их элементов используют ряд стандартных сигналов, называемых типовыми воздействиями. Эти воздействия описываются простыми математическими функциями и легко воспроизводятся при исследовании АСУ. Использование типовых воздействий позволяет унифицировать анализ различных систем и облегчает сравнение их передаточных свойств. Наибольшее применение в ТАУ находят следующие типовые воздействия: · ступенчатое; · импульсное; · гармоническое; · линейное. Ступенчатое воздействие – воздействие, которое мгновенно возрастает от нуля до некоторого значения и далее остается постоянным (рис. 2.2, а). Рис. 2.2. Виды типовых воздействий По характеру изменения выходной величины во времени различают следующие режимы элемента АСУ: · статический; · динамический. Статический режим – состояние элемента АСУ, при котором выходная величина не изменяется во времени, т. е. y(t) = const. Очевидно, что статический режим (или состояние равновесия) может иметь место лишь тогда, когда входные воздействия постоянны во времени. Связь между входными и выходными величинами в статическом режиме описывают алгебраическими уравнениями. Динамический режим – состояние элемента АСУ, при котором входная величина непрерывно изменяется во времени, т. е. y(t) = var. Динамический режим имеет место, когда в элементе после приложения входного воздействия происходят процессы установления заданного состояния или заданного изменения выходной величины. Эти процессы описываются в общем случае дифференциальными уравнениями. Динамические режимы в свою очередь разделяются на: · неустановившийся (переходный); · установившийся (квазиустановившийся). Неустановившийся (переходный) режим – режим, существующий от момента начала изменения входного воздействия до момента, когда выходная величина начинает изменяться по закону этого воздействия. Установившийся режим – режим, наступающий после того, когда выходная величина начинает изменяться по такому же закону, что и входное воздействие, т. е. наступающий после окончания переходного процесса. В установившемся режиме элемент совершает вынужденное движение. Очевидно, что статический режим является частным случаем установившегося (вынужденного) режима при x(t) = const.
Рис. 2.3. Переходные и установившиеся режимы при типовых воздействиях
2.3. Статические характеристики элементов
Передаточные свойства элементов и АСУ в статическом режиме описывают с помощью статических характеристик. Статическая характеристика элемента – зависимость выходной величины y элемента от входной x y = f(x) = y(x) (2.10) в установившемся статическом режиме. Статическая характеристика конкретного элемента может быть задана в аналитическом виде (например, y = kx2) или в виде графика (рис. 2.4).
Рис. 2.4. Статическая характеристика элемента
Как правило, связь между входной и выходной величинами – однозначная. Элемент с такой связью называют статическим (позиционным) (рис. 2.5, а) . Элемент с неоднозначной связью – астатическим (рис. 2.5, б) .
Рис. 2.5. Виды статических характеристик
По виду статических характеристик элементы разделяют на: · линейные; · нелинейные. Линейный элемент – элемент, имеющий статическую характеристику в виде линейной функции (рис. 2.6): y = b + ax. (2.11)
Рис. 2.6. Виды линейной функции
Нелинейный элемент – элемент, имеющий нелинейную статическую характеристику. Нелинейная статическая характеристика аналитически обычно выражается в виде степенных функций, степенных полиномов, дробных рациональных функций и более сложных функций (рис. 2.7).
Рис. 2.7. Виды нелинейных функций
Нелинейные элементы в свою очередь подразделяют на: · элементы с существенно нелинейной статической характеристикой; · элементы с несущественно нелинейной статической характеристикой; Несущественно нелинейная статическая характеристика – характеристика, описываемая непрерывной дифференцируемой функцией. Практически это математическое условие означает, что график функции y = f(x) должен иметь гладкую форму (рис. 2.5, а).В ограниченном диапазоне изменения входной величины x такая характеристика может быть приближенно заменена (аппроксимирована) линейной функцией. Приближенная замена нелинейной функции линейной называется линеаризацией. Линеаризация нелинейной характеристики правомерна, если в процессе работы элемента его входная величина меняется в небольшом диапазоне вокруг некоторого значения x = x0 . Существенно нелинейная статическая характеристика – характеристика, описываемая функцией, имеющей изломы или разрывы. Примером существенно нелинейной статической характеристики может служить характеристика реле (рис. 2.5, в), которое при достижении входного сигнала x (ток в обмотке реле) некоторого значения x1изменит выходной сигнал y (напряжение в коммутируемой цепи) с уровня y1 до уровня y2 . Замена такой характеристики прямой линией с постоянным углом наклона привела бы к существенному несоответствию между математическим описанием элемента и реальным физическим процессом, протекающем в элементе. Поэтому существенно нелинейная статическая характеристика линеаризации не подлежит. Линеаризацию гладких (несущественно нелинейных) статических характеристик можно осуществлять либо по методу касательной, либо по методу секущей. Так, например, линеаризация по методу касательной заключается в разложении функции y(x) в интервале вокруг некоторой точки x0 в ряд Тейлора и в последующем учете первых двух членов этого ряда: y(x) » y(x0) + y¢ (x0)(x – x0), (2.12) где y¢ (x0) – значение производной функции y(x) в заданной точке А с координатами x0 и y0.
Геометрический смысл такой линеаризации заключается в замене кривой y(x) касательной ВС, проведенной к кривой в точке А (рис. 2.8).
Рис. 2.8. Линеаризация статической характеристики методом касательной
При анализе АСУ удобно линейные статические характеристики рассматривать в отклонениях переменных x и y от значений x0 и y0 : Dy = y - y0; (2.13) Dx = x - x0. (2.14) Рис. 2.9. Схема четырехполюсника с линейными элементами Нелинейное дифференциальное уравнение – уравнение, в котором функция Ф содержит произведения, частные, степени и т. д. переменных y(t), x(t) и их производных. Так, например, передаточные свойства четырехполюсника с нелинейным резистором (рис. 2.10) описываются нелинейным дифференциальным уравнением вида Рис. 2.10. Схема четырехполюсника с нелинейным резистором
В функцию Ф (дифференциальное уравнение) входят также величины, называемые параметрами. Они связывают между собой аргументы (y(t), y¢ (t), … y(n)(t); x(t), …x(m)(t), t) и характеризуют свойства элемента с количественной стороны. Например, параметрами являются масса тела, активное сопротивление, индуктивность и емкость проводника и т. д. Большинство реальных элементов описываются нелинейными дифференциальными уравнениями, что значительно усложняет последующий анализ АСУ. Поэтому стремятся перейти от нелинейных к линейным уравнениям вида Для всех реальных элементов выполняется условие m £ n. Коэффициенты a0, a1…an и b0, b1…bm в уравнении (2.19) называются параметрами. Иногда параметры изменяются во времени, тогда элемент называют нестационарным или с переменными параметрами. Таковым, например, является четырехполюсник, схема которого приведена на рис. 2.10. Однако в дальнейших рассуждениях будем рассматривать только элементы с постоянными параметрами. Если при составлении линейного дифференциального уравнения осуществлялась линеаризация статической характеристики элемента, то оно справедливо лишь для окрестности точки линеаризации и может записываться в отклонениях переменных (2.13…2.16). Однако, с целью упрощения записи, отклонения переменных в линеаризованном уравнении будем обозначать теми же символами, что и в исходном нелинейном уравнении, но без символа D. Важнейшим практическим достоинством линейного уравнения (2.19) является возможность применения принципа наложения, согласно которому изменение выходной величины y(t), возникающее при действии на элемент нескольких входных сигналов xi(t), равно сумме изменений выходных величин yi(t), вызываемых каждым сигналом xi(t) в отдельности (рис.2.11).
Рис. 2.11. Иллюстрация принципа наложения
2.4.2. Временные характеристики Дифференциальное уравнение не дает наглядного представления о динамических свойствах элемента, но такое представление дает функция y(t), т. е. решение этого уравнения. Однако одно и то же дифференциальное уравнение может иметь множество решений, зависящих от начальных условий и характера входного воздействия x(t), что неудобно при сопоставлении динамических свойств различных элементов. Поэтому было решено характеризовать эти свойства элемента только одним решением дифференциального уравнения, полученным при нулевых начальных условиях и одном из типовых воздействий: единичном ступенчатом, дельта-функции, гармоническом, линейном. Наиболее наглядное представление о динамических свойствах элемента дает его переходная функция h(t). Переходная функция h(t) элемента – изменение во времени выходной величины y(t) элемента при единичном ступенчатом воздействии и нулевых начальных условиях. Переходная функция может быть задана: · в виде графика; · в аналитическом виде. Переходная функция, как и любое решение неоднородного (с правой частью) дифференциального уравнения (2.19), имеет две составляющие: · вынужденную hв(t) (равна установившемуся значению выходной величины); · свободную hс(t) (решение однородного уравнения). Вынужденную составляющую можно получить решая уравнение (2.19) при нулевых производных и x(t) = 1 Свободную составляющую получаем решая уравнение (2.19) при нулевой правой части hс(t) = где pk – k-й корень характеристического уравнения (в общем случае комплексное число); Сk - k-я постоянная интегрирования (зависит от начальных условий). Характеристическое уравнение – алгебраическое уравнение, степень и коэффициенты которого совпадают с порядком и коэффициентами левой части линейного дифференциального уравнения вида (2.19) a0 pn + a1 pn –1 +…+ an = 0. (2.22)
2.4.3. Передаточная функция
Наиболее распространенным методом описания и анализа АСУ является операционный метод (метод операционного исчисления), в основе которого лежит прямое интегральное преобразование Лапласа для непрерывных функций F(p) = Z { f(t) } = Это преобразование устанавливает соответствие между функцией действительной переменной t и функцией комплексной переменной p = a + jb. Функцию f(t), входящую в интеграл Лапласа (2.23), называют оригиналом, а результат интегрирования – функцию F(p) – изображением функции f(t) по Лапласу. Преобразование выполнимо лишь для функций, которые равны нулю при t< 0. Формально это условие в ТАУ обеспечивается умножением функции f(t) на единичную ступенчатую функцию 1 (t) или выбором начала отсчета времени с момента, до которого f(t) = 0. Наиболее важными свойствами преобразования Лапласа при нулевых начальных условиях являются: Z { f¢ (t) } = pF(p); (2.24) Z { Операционный метод в ТАУ получил широкое распространение, так как с его помощью определяют так называемую передаточную функцию, которая является самой компактной формой описания динамических свойств элементов и систем. Применяя прямое преобразование Лапласа к дифференциальному уравнению (2.19) с использованием свойства (2.24) получим алгебраическое уравнение D(p)Y(p) = K(p)X(p), (2.26) где D(p) = a0 pn + a1 pn-1 +…+ an - собственный оператор; (2.27) K(p) = b0 pm + b1 pm-1 +…+ bm - входной оператор. (2.28)
Введем понятие передаточной функции. Передаточная функция – отношение изображения выходной величины к изображению входной величины при нулевых начальных условиях:
Тогда с учетом уравнения (2.26) и обозначений (2.27, 2.28) выражение для передаточной функции принимает вид: Значение переменной p, при которой передаточная функция W(p) обращается в бесконечность, называется полюсом передаточной функции. Очевидно, что полюсами являются корни собственного оператора D(p). Значение переменной p, при которой передаточная функция W(p) обращается в нуль, называется нулем передаточной функции. Очевидно, что нулями являются корни входного оператора K(p). Если коэффициент a0 ¹ 0, то передаточная функция не имеет нулевого полюса ( p = 0 ), характеризуемый ей элемент называют астатическим и передаточная функция этого элемента при p = 0 ( t = ¥ ) равна передаточному коэффициенту
2.4.4. Частотные характеристики
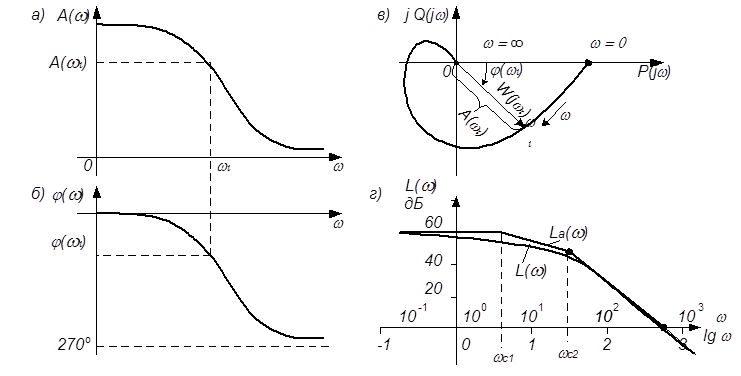
Частотные характеристики описывают передаточные свойства элементов и АСУ в режиме установившихся гармонических колебаний, вызванных внешним гармоническим воздействием. Они находят применение в ТАУ, так как реальные возмущения, а следовательно и реакции на них элемента или АСУ могут быть представлены как сумма гармонических сигналов. Рассмотрим сущность и разновидности частотных характеристик. Пусть на вход линейного элемента (рис. 2.12, а) в момент времени t = 0 подано гармоническое воздействие с частотой w
Рис. 2.12. Схема и кривые, поясняющие сущность частотных характеристик
По завершении переходного процесса установится режим вынужденных колебаний и выходная величина y(t) будет изменяться по тому же закону, что и входная x(t), но в общем случае с другой амплитудой ym и с фазовым сдвигом j по оси времени относительно входного сигнала (рис. 2.12, б): y(t) = ym sin(w t + j ). (2.33) Проведя аналогичный опыт, но при другой частоте w, можно увидеть, что амплитуда ym и фазовый сдвиг j изменились, т. е. они зависят от частоты. Можно убедиться также, что для другого элемента зависимости параметров ym и j от частоты w иные. Поэтому такие зависимости могут служить характеристиками динамических свойств элементов. В ТАУ наиболее часто используют следующие частотные характеристики: · амплитудная частотная характеристика (АЧХ); · фазовая частотная характеристика (ФЧХ); · амплитудно-фазовая частотная характеристика (АФЧХ). Амплитудная частотная характеристика (АЧХ) – зависимость отношения амплитуд выходного и входного сигналов от частоты
Рис. 2.13. Частотные характеристики: а – амплитудная; б – фазовая; в – амплитудно-фазовая; г – логарифмическая Фазовая частотная характеристика ФЧХ – зависимость фазового сдвига между входным и выходным сигналами от частоты. ФЧХ показывает, какое отставание или опережение выходного сигнала по фазе создает элемент при различных частотах. Пример ФЧХ приведен на рис. 2.13, б. Амплитудную и фазовую характеристики можно объединить в одну общую – амплитудно-фазовую частотную характеристику (АФЧХ). АФЧХ представляет собой функцию комплексного переменного jw: W(jw) = A(w ) e jj (w) (показательная форма), (2.35) где A(w ) – модуль функции; j (w) – аргумент функции. Популярное:
|
Последнее изменение этой страницы: 2016-07-12; Просмотров: 3656; Нарушение авторского права страницы









 0. (2.18)
0. (2.18) 
 (2.19)
(2.19)
 (2.20)
(2.20) (2.21)
(2.21) f(t) e-pt dt. (2.23)
f(t) e-pt dt. (2.23) f (t)dt } = F(p) / p. (2.25)
f (t)dt } = F(p) / p. (2.25) (2.29)
(2.29) (2.30)
(2.30)  (2.31)
(2.31) 
 (2.34)
(2.34)