
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Динамические модели для объектов управления, представленных в виде передаточных матриц
Для многомерных систем вместо передаточных функций используются передаточные матрицы, когда вектору входа
где
Рассмотрим систему в пространстве состояний:
для которой применим преобразование Лапласа с учетом начальных условий, полагая Тогда получим:
или
следовательно,
Теперь, если взять обратное преобразование Лапласа
то получим выражение оригинала вектора
где по определению решения дифференциального уравнения с помощью матричной экспоненты
Формула (2) устанавливает способ вычисления матричной экспоненты в аналитическом виде. Для этого надо записать
где При нулевых начальных условиях
или
где С помощью обозначения
которой соответствует система дифференциальных уравнений:
где Пример 1.
Учитывая, что
Приведение полиноминального матричного уравнения к форме Коши Пусть задано уравнение:
Предположим
где
т.е. характеристическим уравнением системы является уравнение:
Пусть в уравнении (1) матричные полиномы имеют вид:
где Положим
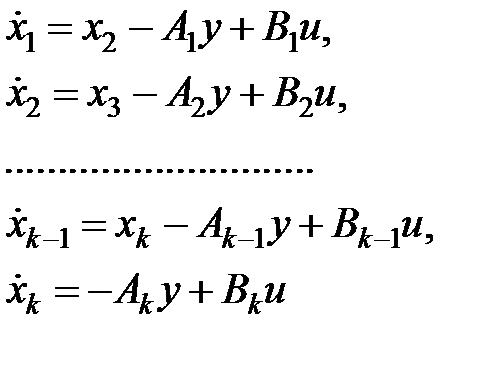
Необходимо перейти к форме:
Используем схему Горнера представления полинома:
Введем вспомогательные переменные:
Отсюда найдем:
Учитывая, что
Введем расширенный вектор
можно записать в виде (2). Пример 1. Пусть задана исходная система
1) По схеме Горнера получим модель в пространстве состояний:
2) С помощью пакета MatLab получим:
или
Можно переписать в виде
Таким образом, получили различные системы, которые имеют одну передаточную функцию, но имеют разные свойства: 1)
2)
В действительности правильной является модель 1). Модель следящей нестационарной системы
Уравнения динамики нестационарной системы имеют вид:
где Утверждение. Система (1) с помощью аффинного преобразования
где
где Здесь приняты обозначения:
P – n× n – матрица перестановок такая, что Доказательство: Учитывая, что
или
Соответственно для выхода найдем:
Что требовалось доказать. В уравнении (2) введем обозначение приведенного возмущения:
где матрица Тогда систему (2) можно переписать в виде:
Аналогичную модель можно получить для дискретной системы заменяя
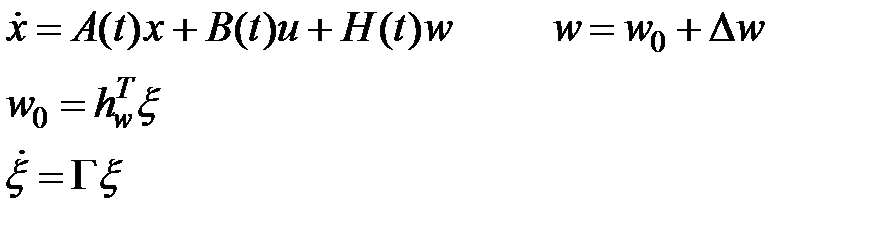
Модели внешних воздействий Рассмотрим управляемую систему:
где Внешние воздействия можно разделить на регулярные и нерегулярные и случайные. Регулярные воздействия – это такие воздействия, которые можно представить с помощью решения дифференциальных уравнений при заранее неизвестных начальных условиях. Нерегулярные внешние воздействия – имеют ограниченную скорость изменения и их можно записать с помощью неравенств, удовлетворяющих некоторым ограничениям. Случайные воздействия – могут иметь разрывы и их нельзя представить в виде модели в времени. Рассмотрим регулярные и нерегулярные воздействия. При этом произвольное воздействие будем представлять в виде суммы регулярного и нерегулярного воздействия: Регулярные внешние воздействия 1)
2)
3)
или
Если B = 0, то
Тем самым, исходную систему можно представить в виде:
Тогда можно записать:
Введем расширенный вектор
или
Популярное:
|
Последнее изменение этой страницы: 2016-07-12; Просмотров: 671; Нарушение авторского права страницы
 размерности
размерности  , соответствует вектор выхода
, соответствует вектор выхода  размерности
размерности  . При этом уравнение в изображениях при нулевых начальных условиях имеет вид:
. При этом уравнение в изображениях при нулевых начальных условиях имеет вид:  , (1)
, (1) ,
,  ,
,  ,
,  – передаточные функции от
– передаточные функции от  -го входа до
-го входа до  -го выхода.
-го выхода.
 ,
, 
 .
. ,
,  ,
,  ,
,  .
. ,
,  :
:  ,
,  найдем:
найдем:  . (2)
. (2) , (3)
, (3) , и найти корни
, и найти корни  характеристического уравнения
характеристического уравнения  . Затем с помощью теоремы разложения упростить элементы матрицы изображений (3) и потом определить (2).
. Затем с помощью теоремы разложения упростить элементы матрицы изображений (3) и потом определить (2). найдем изображение вектора выхода:
найдем изображение вектора выхода:  ,
,  ,
, 

 можно записать систему уравнений
можно записать систему уравнений ,
,  ,
,  ,
,  – символ дифференцирования.
– символ дифференцирования. ,
,  ,
,  , получим:
, получим:  ,
,  .
. (1)
(1) , тогда
, тогда ,
,  ,
,  и, следовательно,
и, следовательно,  ,
,  .
. ,
,  ,
,  (
(  ) –
) –  – матрицы,
– матрицы,  (
(  ) –
) –  – матрицы.
– матрицы. , тогда получим уравнение:
, тогда получим уравнение:  .
. (2)
(2) .
.
 , получим:
, получим: 
 размерностью
размерностью  . Тогда с учетом обозначений
. Тогда с учетом обозначений ,
,  ,
,  ,
,  ,
,  .
.




 .
. ,
,  - неуправляема
- неуправляема ,
,  - наблюдаема
- наблюдаема ,
,  - управляема
- управляема ,
,  - ненаблюдаема
- ненаблюдаема (1)
(1) – вектор командных сигналов,
– вектор командных сигналов,  – вектор возмущений.
– вектор возмущений.
 – псевдообратная матрица, система (1) приводится к виду:
– псевдообратная матрица, система (1) приводится к виду:  (2)
(2) .
. ,
,  ,
,  ,
,  .
. , после подстановки в уравнение (2) получим:
, после подстановки в уравнение (2) получим: 


 ,
,  может быть задана произвольно, например,
может быть задана произвольно, например,  ,
,  , а вектор
, а вектор  – приведенное возмущение.
– приведенное возмущение. .
. , где
, где  - дискретное время.
- дискретное время.
 – возмущение,
– возмущение,  – помеха измерений.
– помеха измерений. .
. – константа.
– константа.

 – линейно нарастающая функция.
– линейно нарастающая функция.





 – гармоническая функция.
– гармоническая функция. ,
, 



 .
.
 .
.

 и перепишем систему:
и перепишем систему: 
