|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Расчет тормозных сопротивлений для двигателей постоянного тока
Величина тормозного сопротивления для ступени противовключения двигателя последовательного возбуждения, которое нужно ввести в цепь якоря для осуществления тормозного спуска груза, может быть определена из выражения допустимого тока якоря, который протекает по якорю в этом режиме.
Ступень противовключения соединяется последовательно с пусковым сопротивлением (см. схему ри. 3.10.1).
Величина Емакс, соответствующая Iдоп и максимально возможной скорости ω макс, определяется из выражения:
Величина ω МАКС определяется из условий двигательного режима, предшествующего противовключению, по минимальной величине МС, а величина ω е – из естественной характеристики по Iдоп. Тормозное сопротивление для режима динамического торможения ДПВ с независимым возбуждением рассчитывается так же из условий ограничения броска тока в начальный момент торможения до допустимого значения Iдоп. Т.к. в этом режиме он отрицателен, а U=UН=0, то
RЯ – сопротивление обмотки якоря без сопротивления обмотки возбуждения (она включена отдельно на напряжение сети). Подставляя вместо Е-EМАКС, а вместо Iя – допустимый ток Iдоп получим, решив выражение относительно Rm:
Емакс определяется исходя из следующего: т.к. при динамическом торможении с независимым возбуждением сопротивление Rдоб подбирается таким, чтобы ток в обмотке возбуждения был номинальный, то Емакс будет во столько раз больше Ен, во сколько ω макс> ω н. Поэтому
Расчет сопротивления ступени противовключения для ДНВ и сопротивления динамического торможения выполняются так же, как и для ДПВ, с той лишь разницей, что максимальная скорость, с которой двигатель переводится в тормозной режим, принимается равной ω 0. Поэтому
Для регулируемых двигателей за начальную скорость торможения принимается набольшая скорость в двигательном режиме ω m при наименьшем Мс. Тогда
В случае торможения ДНВ с ослабленным потоком, так же как и ДПВ, необходимо учитывать, что до начала торможения двигатель работает с повышенной скоростью ω макс и ухудшенными условиями коммутации, приводящим к снижению Iдоп. Поэтому в расчетные формулы вместо Iдоп нужно подставлять Расчет тормозного сопротивления для режима динамического торможения ДСМ с подпиткой последовательной обмотки возбуждения ничем не отличается от расчета Rm для ДПВ. Если последовательная обмотка при торможении отключается (не принимает участия), в выражение:
подставляется Емакс, определяемая только потоком параллельной обмотки возбуждения, т.к. при вращении включенного в сеть ДСМ со скоростью ω 0 его ЭДС=Uсети=UН и через якорь и последовательную обмотку возбуждения ток не проходит. Поэтому При этом ω 0 берется из графика естественной характеристики, а ω макс – из той же характеристики по минимально возможному МС. Сопротивление, включаемое в цепь якоря ДНВ для получения желаемой скорости, например, тормозного спуска груза в режиме рекуперативного торможения при заданном тормозном токе IЯm=IЯдоп, может быть определенно из уравнения электромеханической характеристики с учетом знака тока (он отрицателен)
откуда полное сопротивление якорной цепи:
Тормозное сопротивлении Можно определить Rm задаваясь не тормозным током, а тормозным моментом Мm. С учетом знака момента
Подставив в это выражение вместо ω скорость, заданную скорость ω m, а вместо M – величину тормозного момента, получим
Естественные механическая и электромеханическая характеристика асинхронного двигателя (АД) Основным методом анализа установившихся режимов асинхронного двигателя является использование схем замещения. При этом обычно рассматриваются явления, относящиеся к одной фазе двигателя при соединении обмоток статора и ротора в звезду. Одной из таких схем является Т-образная схема замещения, изображенная на рис. 3.11.1 (в ней не учитываются потери в стали машины).
В соответствии с этой схемой для основных величин, характеризующих работу АД, в курсе электрических машин получены такие выражения: Приведенный ток ротора
Электромагнитная мощность:
Электромагнитный момент:
Критический момент:
Номинальное и критическое скольжения:
Т.к в АД при отсутствии в цепи ротора добавочного сопротивления r1@r'2, то можно найти соотношение
Здесь
Задаваясь различными значениями скольжения, можно построить естественную механическую характеристику двигателя во всем возможном диапазоне изменения скольжения. На рис. 3.11.2 приведены естественные характеристики АД для прямого и обратного действия электромагнитного момента.
Если пренебречь активным сопротивлением r1 обмотки статора, что вполне допустимо для АД большой мощности, то e=0 и уравнение механической характеристики принимает вид (это тоже формула Клосса):
В значительном числе случаев работа АД нормально протекает при S от 0 до (1, 2¸ 1, 5)SH, т.е. при S< (0, 35¸ 0, 4)SKP. Это обстоятельство позволяет в упрощенном выражении механической характеристики пренебречь отношением
Следует иметь в виду, что формулы Клосса достаточно точно описывают механические характеристики АД с фазным ротором. В к.з. АД, выпускаемых обычно с относительно глубокими пазами в роторе, либо с двойной беличьей клеткой, имеется в той или иной степени явление вытеснения тока в стержнях ротора. Поэтому их параметры непостоянны и механические характеристики значительно отличаются от характеристик, рассчитанных по формулам Клосса. Однако, эти формулы благодаря своей простоте позволяют выполнять многие расчеты и делать общие заключения о свойствах и работе АД. В тех же случаях, когда необходима большая точность, должны использоваться экспериментально снятые механические характеристики. У некоторых к.з. АД при малых скоростях механическая характеристика имеет провал, (см. рис.3.11.3), вызванный влиянием высших гармоник поля, с чем следует считаться при пуске двигателя под нагрузкой.
Электромеханические характеристики АД представляют собой зависимости При использовании формулы
это не всегда удается сделать ввиду отсутствия данных о сопротивлениях обмоток двигателя. В связи с этим для получения зависимости
Отсюда
При номинальном режиме:
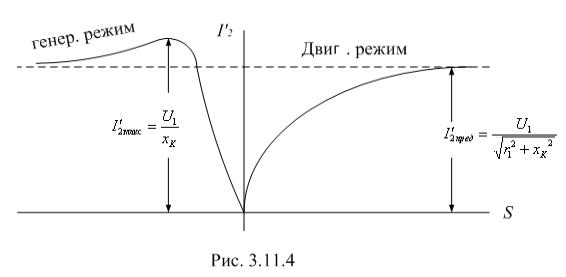
Подставляя 3r2’ в выражение для I2’, получим уравнение электромеханической характеристики:
т.к. при отсутствии в цепи ротора добавочного сопротивления Задаваясь величиной S, получим графическую зависимость
Популярное:
|
Последнее изменение этой страницы: 2016-07-12; Просмотров: 907; Нарушение авторского права страницы
 , откуда
, откуда , где
, где  ; RП – пусковое сопротивление.
; RП – пусковое сопротивление.

 , где
, где .
. .
. и для нерегулируемых двигателей при противовключении и, соответственно при динамическом торможении:
и для нерегулируемых двигателей при противовключении и, соответственно при динамическом торможении: 
 .
. .
.
 , откуда
, откуда  .
. ,
,  , где ω m – скорость, которую нужно иметь при тормозном спуске груза.
, где ω m – скорость, которую нужно иметь при тормозном спуске груза.

 ,
,  .
.
 ;
;  ;
; 
 ;
;  ;
;  ;
; 
 и
и – перегрузочная способность двигателя по М. Поделив М на МКР, после преобразований получим уравнение механической характеристики АД, называемое уравнением Клосса.
– перегрузочная способность двигателя по М. Поделив М на МКР, после преобразований получим уравнение механической характеристики АД, называемое уравнением Клосса.
 .
. , которое в 8÷ 10 раз меньше
, которое в 8÷ 10 раз меньше  . В этом случае механическая характеристика АД может быть представлена прямой, описываемой уравнением (в пределах до МН):
. В этом случае механическая характеристика АД может быть представлена прямой, описываемой уравнением (в пределах до МН):  .
.
 и
и  . Т.к. ток ротора является основной величиной для оценки режима работы двигателя, рассмотрим зависимость
. Т.к. ток ротора является основной величиной для оценки режима работы двигателя, рассмотрим зависимость  .
.
 ,
, 
 : отсюда
: отсюда

 и
и  .
. . Она изображена на рис. 3.11.4.
. Она изображена на рис. 3.11.4.