|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Электромеханические свойства синхронного двигателя СД
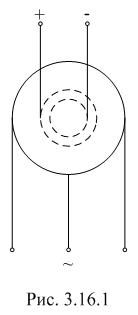
Хотя основной областью применения синхронных двигателей является нерегулируемый электропривод, тем не менее при частотном управлении они используются и в регулируемых электроприводах. Принципиальная схема СД изображена на рис. 3.16.1.
Уравнения угловой характеристики СД, как известно из курса электрических машин, имеет вид:
ω 0 – угловая скорость магнитного поля машин. x1g и x1d – индуктивные сопротивления по поперечной и продольной оси машины. Угловая характеристика изображена на рис. 3.16.2.
Максимальный момент, определяющий перегрузочную способность двигателя, составляет (2÷ 3) МН, т.е. СД менее чувствителен к понижению напряжения внешней сети, чем АД, т.к. основной момент М', обусловленный взаимодействием вращающего поля статора с полем ротора ≡ U1, а реактивный момент М'', хотя и ≡ U12, мало влияет на перегрузочную способность двигателя (2-я составляющая в уравнении угловой характеристики). Рабочий участок угловой характеристики с достаточной для инженерных задач точностью можно заменить линейной зависимостью
СЭМ коэффициент жесткости упругой электромагнитной связь между полем статора и ротора. Дифференцируя это выражение, можно получить приближенное уравнение динамической механической характеристики СД.
В ранее рассмотренной двухмассовой упругой механической системе, было установлено, что момент упругого взаимодействия Дифференцирование этой зависимости дает уравнение, совпадающее по форме с уравнением Действительно, Это подтверждает аналогию между электромагнитными взаимодействиями в СД и механической пружине. Поэтому механическую модель, отражающую особенности синхронного двигателя, можно представить в виде, изображенном на рис. 3.16.3. Здесь электромагнитная связь между полями статора и ротора СД заменена пружиной с жесткостью СЭМ, а приведенный момент инерции ротора и механизма Iпр, представлен подвешенной на этой пружине массой «m». Очевидно, механический аналог СД представляет собой идеальное колебательное звено, в котором возникающие по тем или иным причинам колебания не затухают. Действительно, повышенная склонность к колебаниям при изменении нагрузки, является характерной особенностью СД. Для их устраивается или уменьшения СД снабжаются демпферной (успокоительной) к.з. обмоткой, выполняемой в виде беличьей клети на полюсах ротора. При возникновении колебаний (качаний) ротора, т.е. скольжения, она создает асинхронный момент, который, в первом приближении можно считать пропорциональным скольжению. С учетом этого момента результирующий момент СД в динамическом режиме можно представить в виде суммы синхронного и асинхронного моментов.
Т.к.
Структурная схема, соответствующая этому уравнению, приведена на рис. 3.16.4. В приведенных выражениях β – это модуль жесткости линейной части механической характеристики для асинхронной составляющей момента, обусловленного действием демпферной обмотки. Из структурной схемы следует, что асинхронный момент, создаваемый демпферной обмоткой, оказывает влияние, аналогичное вязкому трению. Поэтому схема механического аналога СД с учетом наличия демпферной обмотки (рис. 3.16.3) должна быть дополнена механическим демпфером с вязким трением. При р=0 получим уравнение статической механической характеристики с ω =ω 0=const при любых значениях М. Действительно, из выражения
при р=0 ω =ω 0 статическая механическая характеристика имеет вид прямой (рис. 3.16.5), параллельной оси моментов в пределах перегрузочной способности двигателя, т.к. при нагрузке, превышающей
В динамических режимах, как следует из уравнения момента, механическая характеристика СД не является абсолютно жесткой. В установившемся динамическом режиме вынужденных колебаний изменениям момента с амплитудой DМmax и соответствующим изменениям угла θ эл соответствуют определенные амплитуды Dω max колебаний скорости и динамическая характеристика имеет вид эллипса. Её динамическая жесткость определяется соотношением:
Популярное:
|
Последнее изменение этой страницы: 2016-07-12; Просмотров: 973; Нарушение авторского права страницы
 Как правило, СД выполняются с явно выраженными полюсами. При работе СД в двигательном режиме его ротор отстает от вращающегося магнитного поля на угол
Как правило, СД выполняются с явно выраженными полюсами. При работе СД в двигательном режиме его ротор отстает от вращающегося магнитного поля на угол  . При номинальной нагрузке этот угол равен
. При номинальной нагрузке этот угол равен  электрических градусов.
электрических градусов. , где
, где
 , где
, где т.к.
т.к.
 .
.
 .
.


 , где
, где  – оператор, уравнение механической характеристики СД в операторной форме можно записать в виде
– оператор, уравнение механической характеристики СД в операторной форме можно записать в виде .
.
 следует, что
следует, что двигатель выпадает из синхронизма.
двигатель выпадает из синхронизма.