
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
А полуразность – наклон основанияСтр 1 из 22Следующая ⇒
Рис. 1.3. Акселерометр со смещением нуля на невертикальном основании
При наличии угла наклона
где
В случае малого угла наклона оси чувствительности акселерометра относительно посадочной базы на его корпусе и малого отклонения основания относительно отвесной линии
Полуразность показаний акселерометра в двух противоположных вертикальных направлениях дает возможность определить масштабный коэффициент акселерометра
Полусумма показаний акселерометра в двух противоположных вертикальных направлениях дает возможность определить смещение нуля акселерометра в предположении линейности характеристики акселерометра в диапазоне ускорений от минус 1g до 1g. 1.1.5. Линейная модель погрешности триады акселерометров. Модель погрешности акселерометра – принятое математическое описание погрешности акселерометра от некоторой совокупности факторов, определяющих его условия функционирования. Наиболее употребительной моделью погрешности является модель степенной зависимости погрешности от проекций вектора кажущегося ускорения основания. При малых ускорениях основания в модели погрешности можно ограничиться первой степенью проекций кажущегося ускорения. Простейшая линейная модель погрешности триады акселерометров, то есть трех акселерометров с номинально ортогональными входными осями, может быть получена из следующих соображений. Введем систему координат
Рис.1.4. К модели погрешности триады акселерометров
Обозначим проекции кажущегося ускорения на оси системы координат При наличии малых относительных погрешностей масштабного коэффициента При наличии малых погрешностей выставки осей чувствительности (рис. 1.4) каждый акселерометр дополнительно измеряет кажущиеся ускорения вдоль двух других осей трехгранника - по оси чувствительности акселерометра X имеем дополнительно проекции кажущегося ускорения - по оси чувствительности акселерометра Y имеем дополнительно проекции кажущегося ускорения - по оси чувствительности акселерометра Z имеем дополнительно проекции кажущегося ускорения Каждый акселерометр имеет свое смещение нуля (bias) Каждый акселерометр имеет свою случайную составляющую погрешности Схемотехника микромеханических инерциальных датчиков обычно такова, что их выходная характеристика смещена на некоторую известную расчетную величину. В нашем случае выходная характеристика каждого канала акселерометра смещена на величину Таким образом, измерения триадой акселерометров составляющих кажущегося ускорения вдоль осей ортогональной системы координат
или в матричной форме
где 1.1.6. Калибровка триады акселерометров. Калибровка - операция определения параметров модели погрешности по принятому алгоритму оценивания. Калибровкав силу приведенной модели погрешности (1.12) осуществляется путем измерения показаний каждого из трех акселерометров при их различных угловых положениях относительно отвесной линии. В гироскопических системах, где есть платформа в кардановом подвесе, сама конструкция прибора является стендом, поскольку позволяет осуществлять выставку платформы в разные угловые положения, именуемые также ориентациями, посредством датчиков команд (датчиков крена, тангажа (дифферента), азимута) и соответствующих следящих систем. В бескарданных системах калибровка осуществляется на наклонно-поворотных стендах и/или оптических делительных головках. Во время проведения данного лабораторного практикума установка в разные ориентации триады акселерометров, закрепленной на ориентационном приспособлении (кубе с взаимно ортогональными установочными плоскостями), осуществляется вручную на предварительно выставленном в горизонте основании. Выставим ось X ориентационного приспособления по направлению отвесной линии вверх в ориентацию 1. Тогда выражения для тестовых воздействий примут вид
Подставив выражения для тестовых воздействий (1.14) в формулы (1.12), получим показания акселерометров в виде
Выставим ось X ориентационного приспособления по направлению отвесной линии вниз в ориентацию 2. Тогда выражения для тестовых воздействий примут вид
Подставив выражения для тестовых воздействий (1.16) в формулы (1.12), получим показания акселерометров в виде
После осреднения показаний акселерометров из (1.15) и (1.17) получим
Вычисление соответствующих полусумм и полуразностей средних значений показаний акселерометров (1.18) в ориентациях 1 и 2 дает возможность определить ряд калибровочных констант триады акселерометров
Выставим ось Y ориентационного приспособления по направлению отвесной линии вверх в ориентацию 3. Тогда выражения для тестовых воздействий примут вид
Подставив выражения для тестовых воздействий (1.20) в формулы (1.12), получим показания акселерометров в виде
Выставим ось Y ориентационного приспособления по направлению отвесной линии вниз в ориентацию 4. Тогда выражения для тестовых воздействий примут вид
Подставив выражения для тестовых воздействий (1.22) в формулы (1.12), получим показания акселерометров в виде
После осреднения показаний акселерометров из (1.21) и (1.23) получим
Вычисление соответствующих полусумм и полуразностей средних значений показаний акселерометров (1.24) в ориентациях 3 и 4 дает возможность определить ряд калибровочных констант триады акселерометров
Выставим ось Z ориентационного приспособления по направлению отвесной линии вверх в ориентацию 5. Тогда выражения для тестовых воздействий примут вид
Подставив выражения для тестовых воздействий (1.26) в формулы (1.12), получим показания акселерометров в виде
Выставим ось Z ориентационного приспособления по направлению отвесной линии вниз в ориентацию 6. Тогда выражения для тестовых воздействий примут вид
Подставив выражения для тестовых воздействий (1.28) в формулы (1.12), получим показания акселерометров в виде
После осреднения показаний акселерометров из (1.27) и (1.29) получим
Вычисление соответствующих полусумм и полуразностей средних значений показаний акселерометров (1.30) в ориентациях 5 и 6 дает возможность определить ряд калибровочных констант триады акселерометров
Окончательно сводка формул для определения калибровочных констант триады акселерометров в силу модели погрешности (1.12) может быть получена из выражений (1.19), (1.25), (1.31): - выражения для вычисления поправок к масштабным коэффициентам
- выражения для вычисления погрешности выставки оси чувствительности акселерометра X
- выражения для вычисления погрешности выставки оси чувствительности акселерометра Y
- выражения для вычисления погрешности выставки оси чувствительности акселерометра Z
- выражения для вычисления смещения нуля акселерометра X
- выражения для вычисления смещения нуля акселерометра Y
- выражения для вычисления смещения нуля акселерометра Z
где
В силу линейности принятой модели (1.12) любая полусумма показаний акселерометра с противоположно направленными осями чувствительности дает оценку смещения нуля. Работа в шести ориентациях дает возможность получить три оценки смещения нуля каждого акселерометра. Поэтому близость значений этих трех оценок может свидетельствовать о корректности проведенной калибровки. Следует также обратить внимание на то, что оценки смещения нуля акселерометров по формулам (1.42), (1.43), (1.44), (1.46), (1.47), (1.48) используют измерения вблизи нулевых сигналов акселерометров, а оценки смещения нуля акселерометров по формулам (1.41), (1.45), (1.49) используют измерения вблизи минус 1g и 1g. Обусловленные этим обстоятельством разница в оценках смещения нуля может указывать на нелинейность выходной характеристики акселерометров. Выделенное для проведения лабораторного практикума ориентационное приспособление (куб с взаимно ортогональными гранями) имеет пять, а не шесть, рабочих граней (рис. 4.2). Шестая грань куба используется для установки разъема и вывода электрических цепей. Отполированные стальные «пятачки», материализующие шестую грань, отсутствуют. Это означает, что ортогональность шестой грани куба не обеспечена с нужной точностью. Поэтому при установке куба в 6 ориентацию имеет смысл проводить измерение одного только выходного сигнала акселерометра Однако отсутствие измерений Недостающие формулы для определения погрешности выставки
где
Объект исследования Объектом исследования является плата трехосного акселерометра (Triple Axis Accelerometer Breakout-MMA7361L SEN-09652 фирмы SparkFun Electronics, Inc) (рис. 1.5).
Рис. 1.5. Плата микромеханического трехосного акселерометра в состоянии поставки
На плате акселерометра размещены: - микросхема трехосного акселерометра MMA7361L фирмы Freescale Semiconductor; - конденсатор в цепи питания микросхемы; - конденсаторы в выходных цепях микросхемы, определяющие полосу пропускания. Микросхема трехосного акселерометра MMA7361L имеет следующие особенности [11]: - габариты 3х5х1мм в стандартном корпусе LGA-14 (land grid array) (рис. 1.6); - низкий уровень питающего напряжения от 2, 2В до 3, 6В; - низкий потребляемый ток в рабочем режиме не более 600мкА; - наличие СПЯЩЕГО РЕЖИМА (SLEEP MODE), который задается внешней командой логического уровня, с потреблением тока в этом режиме не более 10мкА; - наличие РЕЖИМА САМОТЕСТИРОВАНИЯ (SELF TEST), который задается внешней командой логического уровня, для проверки работоспособности микросхемы после транспортирования, монтажа и при эксплуатации; - возможность выбора одного из двух диапазонов измеряемых ускорений ±1, 5g или ±6g по внешней команде логического уровня ДИАПАЗОН 1, 5G/6G (G-SELECT); - наличие функции определения нулевого ускорения 0G(0G-DETECT) для возможной защиты оборудования, например, жесткого диска персонального компьютера, при падении; - высокое значение масштабного коэффициента 800мВ/g при диапазоне ±1, 5g; - возможность формирования полосы пропускания внешним пассивным аналоговым фильтром нижних частот; - прочный корпус, высокая ударная прочность, устойчивость к внешним возмущающим факторам (максимальное ударное ускорение по каждой оси ±5000g неуказанной длительности, напряжение питания от минус 0, 3В до 3, 6В, падение с высоты 1, 8м, предельный температурный диапазон от минус 40º С до +125º С, электростатический разряд напряжением до 2000В); - соответствие экологическим стандартам по содержанию вредных веществ; - низкая стоимость.
Рис. 1.6. Корпус микросхемы акселерометра MMA7361L
Области применения микросхемы трехосного акселерометра MMA7361L: - 3D игры: датчик наклона и движения, запись событий; - датчик падения для жестких дисков MP3 плееров; - портативные компьютеры: датчик падения, защита от кражи; - мобильные телефоны: стабилизация изображения, прокрутка текста, набор номера движением, электронный компас; - шагомер: датчик движения; - навигация и восстановления траектории: компенсация наклона электронного компаса; - робототехника: датчик движения. Упрощенная блок-схема микросхемы трехосного акселерометра MMA7361L представлена на рис. 1.7.
Рис. 1.7. Упрощенная блок-схема микросхемы трехосного акселерометра MMA7361L
Данное устройство представляет собой малогабаритный трехосный акселерометр со встроенной электроникой. Акселерометр состоит из микроскопического емкостного датчика угла (g-cell) и преобразователя сигнала (специализированной интегральной микросхемы - ASIC), объединенных вместе в одном корпусе. Емкостной датчик угла является механической структурой, созданной из полупроводникового материала (поликремния) с использованием таких технологических операций как маскирование и травление. Эта конструкция условно может быть представлена как стержень с подвижной массой (рис. 1.8).
Рис. 1.8. Упрощенная физическая модель микромеханического акселерометра
Инерционная масса на стержне может перемещаться относительно неподвижного основания. Инерционная масса отклоняется от своего положения равновесия под действием ускорения. По мере удаления инерционной массы от одного края основания, она приближаются к другому краю. Изменение расстояния определяет величину ускорения. Инерционная масса на стержне и основание образуют дифференциальный емкостной датчик угла. Специализированная интегральная микросхема преобразует изменение емкости в электрическое напряжение, усиливает и фильтрует этот сигнал, обеспечивая высокое выходное напряжение, которое линейно зависит от напряжения питания и пропорционально ускорению. Типовые значения резонансных частот чувствительного элемента акселерометра составляют по осям X и Y – 6, 0КГц, а по оси Z – 3, 4КГц. Чувствительность к составляющим ускорения по другим осям не превышает ±5%. Время реакции микросхемы на подачу напряжения питания не превышает 2, 0мс. Номинальное расположение осей чувствительности платы акселерометра дано в виде пиктограммы на верхней поверхности печатной платы: - ось X параллельна короткой стороне печатной платы; - ось Y параллельна длинной стороне печатной платы; - ось Z перпендикулярна плоскости печатной платы вверх. Микросхема трехосного акселерометра MMA7361L имеет номинально линейную выходную характеристику и измеряет как положительные, так и отрицательные кажущиеся ускорения. При отсутствии ускорений выходной сигнал устанавливается на уровне половины напряжения питания. При положительных ускорениях выходной сигнал акселерометра лежит в пределах от 0, 5 напряжения питания до 0, 9 напряжения питания, а при отрицательных – в пределах от 0, 5 напряжения питания до 0, 1 напряжения питания. Микросхема трехосного акселерометра MMA7361L обладает свойством линейной зависимости (или пропорциональности) основных параметров (смещения нуля и масштабного коэффициента) от напряжения питания (ratiometricity). Это означает, что при увеличении (уменьшении) напряжения питания смещение нуля и масштабный коэффициент увеличиваются (уменьшаются) линейно. Это свойство является ключевым при обработке сигнала акселерометра микроконтроллером или аналого-цифровым преобразователем, потому что позволяет устранять погрешности, вызванные нестабильностью напряжения питания. При проведении данного практикума используется источник питающего напряжения высокой стабильности, исключающий эти погрешности.
Рис. 1.9. Номинальные выходные сигналы микросхемы акселерометра MMA7361L в разных ориентациях относительно отвесной линии при номинальном напряжении питания 3, 3В
Номинальные выходные сигналы микросхемы акселерометра MMA7361L в разных ориентациях относительно отвесной линии при номинальном напряжении питания 3, 3В приведены на рис. 1.9. Нелинейность выходной характеристики акселерометра определена как наибольшее отклонение от вписанной в реальную выходную характеристику прямой линии в процентах от полного диапазона выходного сигнала. Величина нелинейности выходной характеристики не превышает ±1% диапазона. В интервале напряжений питания от 2, 2В до 3, 6В микросхема работает как полностью откалиброванный линейный акселерометр. За пределами указанного диапазона микросхема также может работать как линейное устройство, но без гарантии заложенной калибровки. Для обеспечения нормальной работы акселерометра изготовитель рекомендует пользователю устанавливать между выводом питания и общей точкой конденсатор емкостью 0, 1мкФ. Измерения выходных сигналов акселерометра на каждом выходе осуществляется через внутреннее выходное сопротивление микросхемы номиналом 32КОм на внешнем конденсаторе, устанавливаемом пользователем между каждым выходом и общей точкой. Это рекомендовано для уменьшения внутреннего шума цифровых устройств микросхемы. Полоса пропускания акселерометра на уровне минус 3дБ определяется номиналом конденсатора, установленного на выходе
где
Рекомендованное изготовителем минимальное значение емкости конденсатора С=3, 3нФ соответствует частоте f=1507Гц, предельной для фильтрации внутренних шумов цифровых устройств микросхемы. В связи с высоким выходным сопротивлением 32КОм каждого из трех выходов микросхемы изготовитель рекомендует, чтобы входное сопротивление нагрузки было 10МОм и более. Для применения в составе измерительной системы изготовитель микросхемы рекомендует выбирать тактовую частоту аналого-цифрового преобразователя и любые внешние тактовые частоты источников питания таким образом, чтобы они не имели интерференции с внутренней тактовой частотой акселерометра 11КГц. Это исключит появление в оцифрованном сигнале разностных частот и связанных с этим погрешностей (aliasing errors). Физическая длина проводников между акселерометром и аналого-цифровым преобразователем (или микроконтроллером) должна быть минимальной. В микросхему трехосного акселерометра заложена функция ОПРЕДЕЛЕНИЕ 0G (0g-DETECT), которая формирует на выводе 9 микросхемы логический сигнал высокого уровня в случае, если по всем трем осям чувствительности регистрируется величина ускорения от минус 0, 4g до 0, 4g. Это соответствует состоянию, близкому к невесомости, или состоянию, близкому к свободному падению [10]. Данная функция позволяет в автоматизированных системах активизировать программу защиты при падении путем подключения данного выхода акселерометра либо к входу прерывания, либо к логическому устройству ввода данных микроконтроллера. Команды СПЯЩИЙ РЕЖИМ, САМОТЕСТИРОВАНИЕ, ДИАПАЗОН 1, 5G/6G для управления режимами работы акселерометра представляют собой логические сигналы высокого уровня (от 0, 7 напряжения питания до напряжения питания) или низкого уровня (от напряжения общей точки до 0, 3 напряжения питания). В микросхему трехосного акселерометра заложена функция СПЯЩИЙ РЕЖИМ, которая делает микросхему идеальной для использования в устройствах с питанием от автономных источников питания, например, батареек или аккумуляторов. Когда СПЯЩИЙ РЕЖИМ активен, все выходы отключены, что значительно снижает потребляемый ток. Для этого достаточно подать на вывод 7 микросхемы логический сигнал низкого уровня, чтобы перевести микросхему в СПЯЩИЙ РЕЖИМ и тем самым снизить потребляемый ток до величины не более 10мкА. Для большего снижения потребляемого тока рекомендуется перевести микросхему в режим измерения ускорений в диапазоне ±1, 5g (функция ДИАПАЗОН 1, 5G/6G). Подача на вывод 7 микросхемы логического сигнала высокого уровня возобновляет обычный режим работы акселерометра. Время реакции микросхемы на выход из СПЯЩЕГО РЕЖИМА не превышает 2, 0мс. В микросхему трехосного акселерометра заложена функция САМОТЕСТИРОВАНИЯ, которая позволяет проверить механическую и электрическую исправность акселерометра как до, так и после монтажа на печатной плате. Данная функция крайне востребована в устройствах защиты жестких дисков, так как данные устройства должны проходить проверку на протяжении всего периода эксплуатации. Пользователь может использовать данную функцию как способ проверки качества пайки при установке микросхемы на печатную плату. Для проверки акселерометра с помощью данной функции необходимо установить акселерометр в перевернутое положение так, чтобы по оси чувствительности Z величина ускорения составила бы минус 1g. При активизации режима САМОТЕСТИРОВАНИЯ подачей сигнала высокого логического уровня на вывод 13 микросхемы по каждой оси акселерометра прикладывается дополнительная электростатическая сила, вызывающая изменение выходных сигналов. По осям X и Y изменение выходных сигналов незначительно и составляет от +0, 05g до минус 0, 1g, а по оси Z приращение выходного сигнала лежит в пределах от +0, 8g до +1, 2g. Время реакции микросхемы на команду САМОТЕСТИРОВАНИЯ не превышает 5, 0мс. Данная процедура позволяет проверить исправность механической и электрической частей микросхемы одновременно. Подача на вывод 13 микросхемы сигнала низкого логического уровня возобновляет обычный режим работы акселерометра. В микросхему трехосного акселерометра заложена функция ДИАПАЗОН 1, 5G/6G выбора диапазона измеряемых ускорений. При подаче на вывод 10 микросхемы сигнала низкого логического уровня устанавливается диапазон измеряемых ускорений ±1, 5g c номинальным масштабным коэффициентом 800мВ/g. Сигнал высокого логического уровня на выводе 10 устанавливает диапазон измеряемых ускорений ±6g с номинальным масштабным коэффициентом 206мВ/g. Диапазон измеряемых ускорений может быть изменен в любой момент времени в процессе работы микросхемы. Вывод 10 микросхемы может быть оставлен неподключенным, тогда автоматически устанавливается диапазон измеряемых ускорений ±1, 5g с масштабным коэффициентом 800мВ/g.
Популярное:
|
Последнее изменение этой страницы: 2016-05-30; Просмотров: 1265; Нарушение авторского права страницы
 (1.8)
(1.8)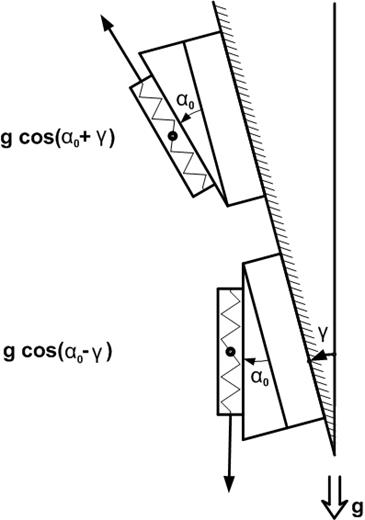
 оси чувствительности акселерометра относительно посадочной базы на его корпусе и отклонения основания относительно отвесной линии
оси чувствительности акселерометра относительно посадочной базы на его корпусе и отклонения основания относительно отвесной линии  (рис. 1.3) показания акселерометра в двух противоположных положениях оси чувствительности акселерометра можно представить в следующем виде
(рис. 1.3) показания акселерометра в двух противоположных положениях оси чувствительности акселерометра можно представить в следующем виде (1.9)
(1.9) - показания акселерометра в двух противоположных положениях на номинально вертикальном основании, мВ;
- показания акселерометра в двух противоположных положениях на номинально вертикальном основании, мВ;  (1.10)
(1.10)
 (1.11)
(1.11) (рис. 1.4). Входные оси каждого из трех акселерометров совпадают с осями системы координат
(рис. 1.4). Входные оси каждого из трех акселерометров совпадают с осями системы координат 
 .
. ,
,  ,
,  каждый акселерометр измеряет проекцию кажущегося ускорения на свою ось чувствительности с соответствующими погрешностями
каждый акселерометр измеряет проекцию кажущегося ускорения на свою ось чувствительности с соответствующими погрешностями  .
. и
и  ;
;  и
и  ;
;  и
и  .
. , в общем случае зависящее от времени, температуры и других внешних условий.
, в общем случае зависящее от времени, температуры и других внешних условий. .
. , в нашем случае равную половине напряжения питания акселерометра.
, в нашем случае равную половине напряжения питания акселерометра. (1.12)
(1.12) (1.13)
(1.13) - номинальные значения масштабных коэффициентов по соответствующим осям.
- номинальные значения масштабных коэффициентов по соответствующим осям. (1.14)
(1.14) (1.15)
(1.15) (1.16)
(1.16) (1.17)
(1.17) (1.18)
(1.18)
 (1.19)
(1.19) (1.20)
(1.20) (1.21)
(1.21) (1.22)
(1.22) (1.23)
(1.23) (1.24)
(1.24)
 (1.25)
(1.25) (1.26)
(1.26) (1.27)
(1.27) (1.28)
(1.28) (1.29)
(1.29) (1.30)
(1.30)
 (1.31)
(1.31) (1.32)
(1.32) (1.33)
(1.33) (1.34)
(1.34) (1.35)
(1.35) (1.36)
(1.36) (1.37)
(1.37) (1.38)
(1.38) (1.39)
(1.39) (1.40)
(1.40) (1.41)
(1.41) (1.42)
(1.42) (1.43)
(1.43) (1.44)
(1.44) (1.45)
(1.45) (1.46)
(1.46) (1.47)
(1.47) (1.48)
(1.48) (1.49)
(1.49) ,
,  ,
,  ,
,  ,
,  ,
,  - средние значения показаний акселерометра X в соответствующей ориентации;
- средние значения показаний акселерометра X в соответствующей ориентации;  ,
,  ,
,  ,
,  ,
,  ,
,  - средние значения показаний акселерометра Y в соответствующей ориентации;
- средние значения показаний акселерометра Y в соответствующей ориентации;  ,
,  ,
,  ,
,  ,
,  - средние значения показаний акселерометра Z в соответствующей ориентации;
- средние значения показаний акселерометра Z в соответствующей ориентации;  - смещения выходной характеристики каналов акселерометра.
- смещения выходной характеристики каналов акселерометра. по оси Z для определения масштабного коэффициента
по оси Z для определения масштабного коэффициента  по формуле (1.34). Показания двух других акселерометров
по формуле (1.34). Показания двух других акселерометров  и
и  неизбежно будут содержать произвольные углы отклонения шестой грани от ортогональности с другими гранями и не могут быть использованы для определения погрешностей выставки осей чувствительности акселерометров X и Y по формулам (1.36) и (1.38).
неизбежно будут содержать произвольные углы отклонения шестой грани от ортогональности с другими гранями и не могут быть использованы для определения погрешностей выставки осей чувствительности акселерометров X и Y по формулам (1.36) и (1.38). оси чувствительности акселерометра X и погрешности выставки
оси чувствительности акселерометра X и погрешности выставки  оси чувствительности акселерометра Y можно получить из первой и второй формул выражения (1.30)
оси чувствительности акселерометра Y можно получить из первой и второй формул выражения (1.30) (1.50)
(1.50) (1.51)
(1.51) - смещения нуля акселерометров соответственно X и Y, вычисленные по формулам (1.41), (1.42) и (1.44), (1.45).
- смещения нуля акселерометров соответственно X и Y, вычисленные по формулам (1.41), (1.42) и (1.44), (1.45).




 ,
,  - частота пропускания фильтра на уровне минус 3дБ, Гц;
- частота пропускания фильтра на уровне минус 3дБ, Гц;  - выходное сопротивление акселерометра, Ом (в данном случае 32КОм);
- выходное сопротивление акселерометра, Ом (в данном случае 32КОм);  - емкость внешнего конденсатора на выходе акселерометра, Ф.
- емкость внешнего конденсатора на выходе акселерометра, Ф.