|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Этап 2. Калибровка на основании, вращающемся с постоянной скоростью вокруг вертикальной оси.
Выставим ось X по направлению отвесной линии вверх в ориентацию 1. Тестовые воздействия
подставим в формулы (2.9)
При вращении с той же угловой скоростью в противоположную сторону выражения для тестовых воздействий примут вид
Подставим выражения для тестовых воздействий (2.30) в формулы (2.9)
После осреднения результатов измерений (2.29), (2.31) в ориентации 1 имеем
Здесь и далее величины Из выражений (2.32) могут быть определены следующие калибровочные константы трехосного ДУС
Выставим ось Y по направлению отвесной линии вверх в ориентацию 3. Тестовые воздействия
подставим в формулы (2.1)
При вращении с той же угловой скоростью в противоположную сторону выражения для тестовых воздействий примут вид
Подставим выражения для тестовых воздействий (2.36) в формулы (2.9)
После осреднения результатов измерений (2.35), (2.37) в ориентации 3 имеем
Из выражений (2.38) могут быть определены следующие калибровочные константы трехосного ДУС
Выставим ось Z по направлению отвесной линии вверх в ориентацию 5. Тестовые воздействия
подставим в формулы (2.9)
При вращении с той же угловой скоростью в противоположную сторону выражения для тестовых воздействий примут вид
Подставим выражения для тестовых воздействий (2.42) в формулы (2.9)
После осреднения результатов измерений (2.33), (2.35) в ориентации 5 имеем
Из выражений (2.36) могут быть определены следующие калибровочные константы трехосного ДУС
Окончательно сводка формул для определения калибровочных констант триады ДУС в силу модели погрешностей (2.9) может быть получена из выражений (2.15), (2.21), (2.27), (2.33), (2.39), (2.45): - выражения для вычисления поправок к масштабным коэффициентам
- выражения для вычисления погрешностей выставки оси чувствительности ДУС X
- выражения для вычисления погрешностей выставки оси чувствительности ДУС Y
- выражения для вычисления погрешностей выставки оси чувствительности ДУС Z
- выражения для вычисления коэффициентов влияния кажущихся ускорений по осям X, Y, Z ДУСа X
- выражения для вычисления коэффициентов влияния кажущихся ускорений по осям X, Y, Z ДУС Y
- выражения для вычисления коэффициентов влияния кажущихся ускорений по осям X, Y, Z ДУС Z
- выражения для вычисления смещения нуля ДУС X
- выражения для вычисления смещения нуля ДУС Y
- выражения для вычисления смещения нуля ДУС Z
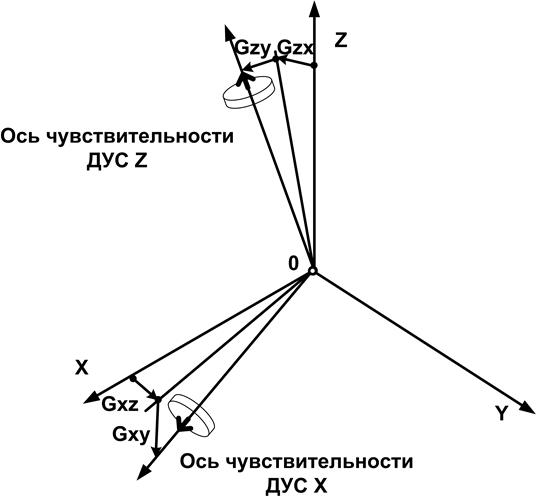
Работа в шести ориентациях на неподвижном основании при отсутствии тестовых вращений дает возможность получить три оценки смещения нуля каждого ДУС. Поэтому близость значений этих трех оценок может свидетельствовать о корректности проведенной калибровки. Следует также обратить внимание на то, что все оценки смещения нуля ДУС по формулам (2.64)…(2.72) используют измерения вблизи нулевых сигналов ДУС. Таким образом, нелинейность выходной характеристики ДУС не влияет на оценки смещения. Изложенная выше методика калибровки триады ДУС учитывает специфику используемого ориентационного приспособления – наличие только пяти, а не шести рабочих граней. Отсутствие шестой рабочей грани не влияет на качество калибровки. Полученные в данном разделе формулы (2.46)…(2.72) используются в главе 3 при калибровке трех каналов угловой скорости микромеханического инерциального измерительного блока. 2.1.6. Линейная модель двухосного ДУС. Калибровка двухосного ДУС. Модель двухосного ДУС с осями чувствительности X и Z (рис. 2.4) может быть получена из выражения (2.9) путем вычеркивания второй строчки с сохранением всех принятых ранее обозначений
Рис. 2.4. К модели погрешности двухосного ДУС
Сводка формул для определения калибровочных констант двухосного ДУС с осями чувствительности X и Z в силу модели погрешностей (2.73) может быть получена из выражений (2.46)…(2.72): - выражения для вычисления поправок к масштабным коэффициентам
- выражения для вычисления погрешностей выставки оси чувствительности ДУС X
- выражения для вычисления погрешностей выставки оси чувствительности ДУС Z
- выражения для вычисления коэффициентов влияния кажущихся ускорений по осям X, Y, Z ДУС X
- выражения для вычисления коэффициентов влияния кажущихся ускорений по осям X, Y, Z ДУС Z
- выражения для вычисления смещения нуля ДУС X
- выражения для вычисления смещения нуля ДУС Z
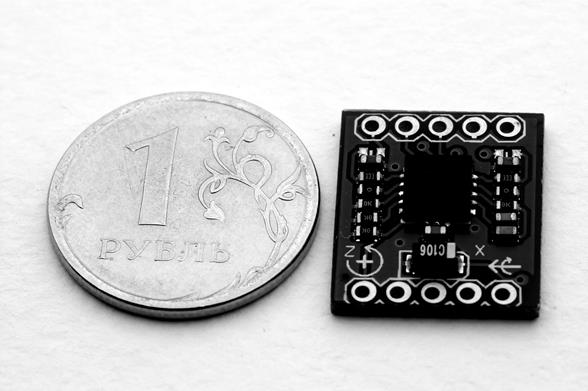
Приведенные в данном разделе формулы (2.74)…(2.91) используются в данной главе при калибровке микромеханического двухосного ДУС. Объект исследования Объектом исследования является плата двухосного ДУС (Gyro Breakout Board – LPY503AL Dual 30 SEN-09422 фирмы SparkFun Electronics, Inc) (рис. 2.5).
Рис. 2.5. Плата микромеханического двухосного ДУС в состоянии поставки
На плате ДУС размещены: - микросхема двухосного ДУС LPY503AL фирмы STMicroelectronics; - два конденсатора (электролитический 10мкФ и керамический 10нФ) в цепи питания; - RC-цепочки рекомендуемого низкочастотного пассивного фильтра по каждому выходу, определяющую полосу пропускания; - RC-цепочки дополнительного высокочастотного пассивного фильтра по каждому выходу; - элементы пассивного фильтра в цепи возбуждения. Микросхема двухосного ДУС LPY503AL имеет следующие особенности [15]: - габариты 5х5х1, 5мм в стандартном пластмассовом корпусе LGA-16L (land grid array); - единственный источник питающего напряжения низкого уровня от 2, 7В до 3, 6В; - широкий диапазон рабочей температуры окружающей среды от минус 40º С до 85 º С; - высокая температурная стабильность; - выходная информация об угловой скорости в виде постоянного напряжения; - два отдельных выхода по каждой оси (с коэффициентом передачи х1 и с коэффициентом передачи х4); - встроенные фильтры низкой частоты; - низкая потребляемая мощность; - наличие режима низкого потребления мощности СПЯЩИЙ РЕЖИМ (POWER DOWN или, что, то же, SLEEP MODE); - наличие режима САМОТЕСТИРОВАНИЕ (SELF TEST); - высокая ударо- и вибропрочность. Области применения микросхемы двухосного ДУС LPY503AL: - стабилизация изображений для DSC DVC; - управление движением с пользовательским интерфейсом; - промышленность и роботы. Микросхема LPY503AL является маломощным двухосным микромеханическим гироскопом, обеспечивающим измерение угловых скоростей по оси тангажа и оси рыскания. Она обеспечивает высокую температурную стабильность и высокие характеристики в диапазоне рабочих температур от минус 40˚ С до 85˚ С. Микросхема LPY503AL имеет диапазон измерений ±30º /сек и обеспечивает выработку угловых скоростей в полосе пропускания до 140Гц на уровне минус 3дБ. - низкий потребляемый ток в рабочем режиме не более 600мкА; - наличие СПЯЩЕГО РЕЖИМА (SLEEP MODE), который задается внешней командой логического уровня, с потреблением тока в этом режиме не более 10мкА; - наличие режима САМОТЕСТИРОВАНИЯ (SELF TEST), который задается внешней командой логического уровня, для проверки работоспособности микросхемы после транспортирования, монтажа и при эксплуатации; - прочный корпус, высокая ударная прочность, устойчивость к внешним возмущающим факторам (максимальное ударное ускорение по каждой оси ±5000g неуказанной длительности, напряжение питания от минус 0, 3В до 3, 6В, падение с высоты 1, 8м, рабочий температурный диапазон от минус 40º C до +85º C, электростатический разряд напряжением до 2000В); - соответствие экологическим стандартам по содержанию вредных веществ; - низкая стоимость.
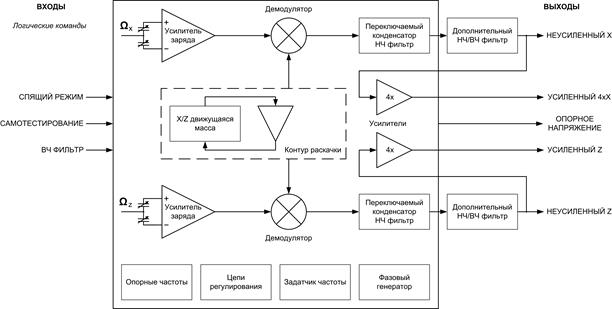
Упрощенная блок-схема микросхемы ДУС LPY503AL представлена на рис. 2.6. Контур раскачки приводит в непрерывное колебательное движение движущуюся массу. Изготовитель микросхемы не указывает вид колебательного движения: поступательный или вращательный. При наличии соответствующей угловой скорости основания на движущуюся массу действует Кориолисова сила, которая приводит к появлению электрического сигнала на выходе дифференциального емкостного датчика. После демодуляции и сглаживания внутренним НЧ фильтром выходной сигнал поступает на два внешних НЧ и ВЧ фильтра. Изготовитель трактует НЧ фильтр как рекомендованный, а ВЧ фильтр, подключаемый по внешней команде логического уровня, как дополнительный. После НЧ и ВЧ фильтров выходной сигнал ДУС в виде постоянного напряжения с так называемого неусиленного, обычного выхода в масштабе 8, 3мВ/(º ⁄ с) может быть использован потребителем. При необходимости выходные сигналы можно подать на встроенные в микросхему усилители с коэффициентом передачи х4. Тогда масштабные коэффициенты выходных сигналов ДУС с так называемых усиленных выходов составят величину 33, 3мВ/(º ⁄ с).
Рис. 2.6. Упрощенная блок-схема микросхемы LPY503AL
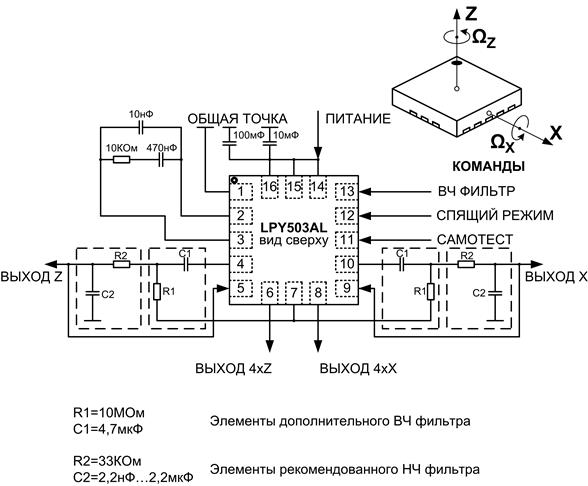
Схема включения микросхемы LPY503AL и номиналы внешних компонентов представлены на рис. 2.7.
Рис. 2.7. Схема включения микросхемы LPY503AL и номиналы внешних компонентов
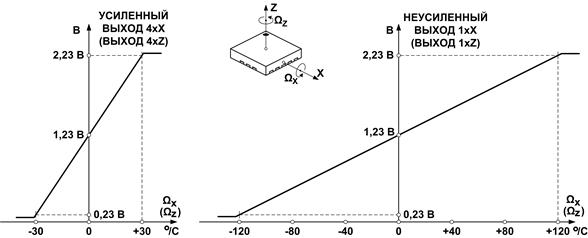
Выходная характеристика микросхемы ДУС (рис. 2.8) имеет ряд особенностей. Выходной сигнал микросхемы ДУС при отсутствии входной угловой скорости равен 1, 23В по всем четырем выходам. Величины масштабных коэффициентов и значения выходных сигналов при нулевой угловой скорости не пропорциональны напряжению питания (are not ratiometric to supply voltage). При положительной угловой скорости 30º ⁄ с выходное напряжение на выходах ВЫХОД4хX и ВЫХОД4хZ достигает значения 2, 23В. При отрицательной угловой скорости минус 30º ⁄ с выходное напряжение на выходах ВЫХОД4хX и ВЫХОД4хZ уменьшается до 0, 23В. При дальнейшем увеличении угловой скорости в одном или другом направлении происходит насыщение обоих выходов. Насыщение двух других выходов ВЫХОД1хX и ВЫХОД1хZ при тех же выходных напряжениях происходит при превышении угловой скорости 120º ⁄ с в одном или другом направлении.
Рис. 2.8. Выходная характеристика ДУС
Механические параметры микросхемы ДУС LPY503AL при номинальном напряжении питания 3, 0В и температуре окружающей среды 25º C представлены в таблице 2.2.1. Таблица 2.2.1
Примечания: 1. Продукция при изготовлении калибруется при напряжении питания 3, 0В. Рабочий диапазон напряжения питания от 2, 7В до 3, 6В. 2. Типичные значения параметров не гарантируются. 3. Масштабный коэффициент и значение сигнала при нулевой угловой скорости не пропорциональны напряжению питания (are not ratiometric to supply voltage). 4. Продукция способна измерять угловую скорость в диапазоне от постоянного тока до назначенной полосы пропускания. Популярное:
|
Последнее изменение этой страницы: 2016-05-30; Просмотров: 796; Нарушение авторского права страницы
 (2.28)
(2.28) (2.29)
(2.29) (2.30)
(2.30) (2.31)
(2.31) (2.32)
(2.32)
 и
и  представляют среднее арифметическое показаний ДУС, зафиксированных в каждой ориентации с номером
представляют среднее арифметическое показаний ДУС, зафиксированных в каждой ориентации с номером  , при вращении в положительном направлении против часовой стрелки
, при вращении в положительном направлении против часовой стрелки  и в отрицательном направлении по часовой стрелке (
и в отрицательном направлении по часовой стрелке (  ) соответственно.
) соответственно. 
 (2.33)
(2.33) (2.34)
(2.34) (2.35)
(2.35) (2.36)
(2.36) (2.37)
(2.37) (2.38)
(2.38)
 (2.39)
(2.39) (2.40)
(2.40) (2.41)
(2.41) (2.42)
(2.42) (2.43)
(2.43) (2.44)
(2.44)
 (2.45)
(2.45) , (2.46)
, (2.46) , (2.47)
, (2.47) , (2.48)
, (2.48) , (2.49)
, (2.49) , (2, 50)
, (2, 50) , (2.51)
, (2.51) , (2.52)
, (2.52) , (2.53)
, (2.53) , (2.54)
, (2.54) (2.55)
(2.55) (2.56)
(2.56) (2.57)
(2.57) (2.58)
(2.58) (2.59)
(2.59) (2.60)
(2.60) (2.61)
(2.61) (2.62)
(2.62) (2.63)
(2.63) (2.64)
(2.64) (2.65)
(2.65) (2.66)
(2.66) (2.67)
(2.67) (2.68)
(2.68) (2.69)
(2.69) (2.70)
(2.70) (2.71)
(2.71) (2.72)
(2.72) (2.73).
(2.73).