|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Основные узлы механической части ПС. Принцип разделения масс.Стр 1 из 3Следующая ⇒
Основные узлы механической части ПС. Принцип разделения масс. Механическая часть состоит: 1. Самый крупный по массе и объёму узел локомотива или моторного вагона – кузов, служит для размещения оборудования, бригады или пассажиров и защиты их от внешних воздействий. 2. Рама тележки – передача всех вертикальных, продольных и поперечных сил между кузовом и колёсными парами, а так же передачу сил тяги и торможения. К раме крепится тяговый привод и тормозные устройства. 3. Колёсная пара – для передачи нагрузок от электровоза на путь и обратно, участвует в процессе создания силы тяги и торможения. 4. Подшипниковый узел – служит для беспрепятственного вращения колёсной пары относительно не вращающихся частей. 5. Тяговый привод – для создания силы тяги, включающий в себя тяговый двигатель с устройствами управления и тяговую передачу, приводящую во вращение движитель – колёсную пару. 6. Для передачи силы тяги на прицепную часть поезда используют упряжные приборы. 7. Локомотив оснащается тормозными устройствами. Кроме этого современные электровозы содержат: рессорное подвешивание (1 или 2 ступени), узлы опирания кузова на тележки и передачи продольных сил между тележкой и кузовом, квазиупругие поперечные связи между ними, поворотные устройства. Принцип разделения масс При движении колес подвижного состава по рельсам между ними возникают динамические нагрузки. Данные нагрузки имеют негативную особенность, которая связана с тем, что при увеличении скорости движения силы взаимодействия возрастают до достаточно большой величины, превышающей силу давления колеса на рельс. Это влияет на безопасность движения колеса по рельсу и не должно допускаться. Однако уменьшить динамические силы можно через уменьшение массы электровоза, но это может привести к уменьшению реализуемой силы тяги по сцеплению колеса с рельсом. Вес Локомотива не изменяется, а его масса делится на несколько отдельных масс, которые соединены между собой упругими элементами. Такое разделение принято называть – «принципом разделения масс». Суть: Для обеспечения нормального сцепления с одновременным уменьшением динамических нагрузок Для перевозки больших масс - вес локомотива распределяют на несколько раздельных масс, которые соединяются между собой упругими элементами. (чтобуменьшить динамическое воздейстивие на путь, при этом не уменьшая тяговые усилия (которые зависят от массы локомотива).) 2. Основные задачи исследования динамики ПС. Динамические характеристики ПС. Основные задачи динамики локомотивов Динамика локомотива – физический процесс возникновения сил, моментов, перемещений составных частей локомотива, вследствие взаимодействия его ходовых частей и верхнего строения пути (ВСП), а также локомотивов и вагонов в движущимся поезде. Основная задача исследования динамических процессов в системе «ПС - путь» заключается в том, чтобы определить оптимальные значения параметров этой системы (габаритные размеры, масса, жесткость и т. п.), при которых снижаются колебания и динамические силы, отрицательно влияющие на конструкции ПС и пути. Этому должны предшествовать решения задач по: - исследованию колебательных процессов ПС и его отдельных частей, - установление критериев для оценки плавности его хода, - устойчивости против схода с рельсов, - опрокидывания и выжимания из состава поезда, - анализ способов подавления извилистого движения ПС, - вибраций их элементов, возникающих вследствие взаимодействия ходовых частей ПС и пути, а также ПС между собой и с локомотивами в составе поезда. К динамике ПС примыкают и такие вопросы, как борьба с шумом в пассажирских вагонах, вопросы вибрации элементов ПС и некоторые другие. Под параметрами понимают – габаритные размеры, массы, жесткости элементов связи. Для определения оптимальных параметров необходимо исследование колебательных процессов локомотива и его отдельных частей, установление критериев для оценки плавности хода, критериев устойчивости против схода с рельсов, критериев вибрации элементов. С точки зрения динамики механическая часть локомотива должна удовлетворять следующим требованиям: · обеспечивать устойчивость движения экипажа; · удовлетворять требованиям к качеству механической части. Совокупность методов решения перечисленных задач и представляет собой содержание науки “Динамика ЭПС”.
Обобщенные координаты Параметры, которыми описывается число степеней свободы - называются обобщенными координатами.
Соотношение частот.
Резонанс Значительное возрастание амплитуды колебаний происходит при сов- падении частот собственных и вынужденных колебаний ω = ω св, такое явление называют – резонансом, а частоту вынужденных колебаний - резонансной. (3ий случай выше)
Резонанс - явление резкого возрастания амплитуды вынужденных колебаний, которое наступает при приближении частоты внешнего воздействия к некоторым значениям (резонансным частотам), определяемым свойствами системы. Увеличение амплитуды - это следствие резонанса, а причина - совпадение внешней (возбуждающей) частоты с внутренней (собственной) частотой колебательной системы. Резонанс приводит к значительным динамическим силам с последующим разрушением, повреждением механической системы или возникновения опасных напряжений, сокращающих срок ее службы. Поэтому при проектировании необходимо, по возможности, избегать резонанса.
13. Частотный метод исследования вынужденных колебаний (на примере модели с одной степенью свободы). Получение ЧХ модели. (вот это хз) Рассмотрим в качестве примера получение ЧХ для модели с одной степенью свободы. Для получения ЧХ необходимо иметь уравнение колебаний, которое для данной модели имеет следующий вид (см. гл. 2, формула 2.19)
Преобразуем уравнение в операторную форму. Для перехода из временной области в частотную используем следующие выражения
В соответствии с (6.9), (6.10) и (6.11) уравнение (6.8) примет вид
Вынесем за скобки постоянные множители, получим
Для получения ЧХ необходимо многочлен правой части разделить на многочлен левой
Выражение (6.14) представляет собой ЧХ, связывающую возмущение С учетом (6.14) уравнение (6.13) примет вид
Модель с 1 степ. свободы. АЧХ
ФЧХ 15. Анализ АЧХ модели с одной степенью свободы. Для построения графиков АЧХ и ФЧХ необходимо задать параметры модели (Ж, m и β ). Вид АЧХ:
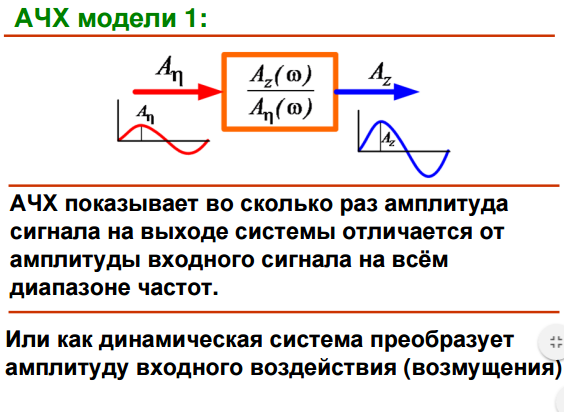
На графике АЧХ по оси абсцисс откладывается частота возмущающего воздействия, а по оси ординат отношение амплитуд выходного (колебания подпрыгивания Z) и входного (неровности) сигналов системы. График АЧХ имеет максимум (пик-точка 2). Пики соответствуют собственным частотам динамической системы, такие частоты называют резонансными. АЧХ показывает, каким образом динамическая система преобразует входное возмущение, т.е. во сколько раз амплитуда выхода (амплитуда колебаний подпрыгивания - Az) отличается от входа (неровности An). Сущность АЧХ системы:
Амплитуда выходной координаты Az будет зависеть от амплитуды не- ровности Aη, и она будет тем больше, чем больше Aη. Однако, входное возмущение может иметь разную частоту, которая зависит от скорости движения ПС и длины неровности рельса. Такую частоту принято называть – частотой вынужденных колебаний:
V - скорость движения, м/с; Lн - длина волны неровности рельса, м. Таким образом, диапазон частот входного возмущения очень широк. На графике АЧХ имеются 3 области: I – до резонансная (область малых частот) – характерна для низких скоростей движения. Ордината АЧХ примерно равна 1, т.е. Az ≈ An (Az /An = 1). II – резонансная (частота вынужденных колебаний приближается к собственной частоте динамической системы) - В области II с увеличением частоты происходит рост АЧХ и при достижении частоты, соответствующей частоте собственных колебаний модели III – после резонансная (область больших частот) - При дальнейшем увеличении частоты происходит снижение АЧХ и в точке 3, график переходит из области усиления в область ослабления возмущения (Az< An). Таким образом, высокая частота возмущения (высокая скорость движения) мало влияет на амплитуду колебания модели и при дальнейшем увеличении частоты – АЧХ стремиться к нулю. АЧХ усиливает или ослабляет входное воздейсвие. Форма АЧХ (ширина зон, высота пика) зависит от параметров динамической модели. Существенно на АЧХ влияют параметры РП модели (жесткость и диссипация). От величины этих параметров зависит фильтрующая способность РП (ослабление или усиление) входного возмущения.
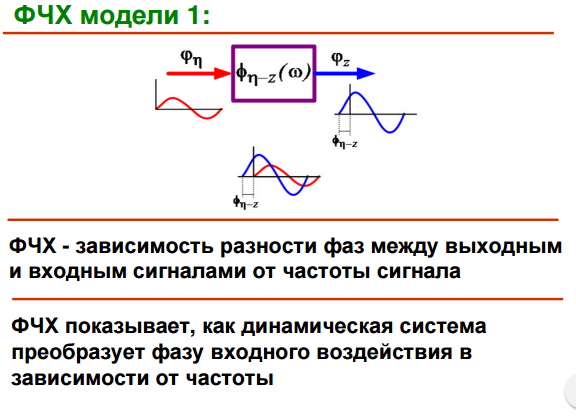
16. Анализ ФЧХ модели с одной степенью свободы.
На графике ФЧХ по оси абсцисс откладывается частота возмущающего воздействия, а по оси ординат разность фаз выходного (колебания подпрыгивания Z) и входного (неровности) сигналов системы, которая измеряется в градусах. В области I, где график АЧХ имеет ординату равную 1, на графике ФЧХ – ордината равна 0. Это говорит о том, что колебания совпадают по фазе с возмущающей силой и сдвиг фаз отсутствует. В области II с ростом АЧХ увеличивается сдвиг фаз и при достижении резонансной частоты (точка 2) имеется смещение колебаний модели по фазе от возмущающей силы на π /2. В области III при снижении АЧХ – сдвиг фаз продолжает увеличиваться, и при приближении графика АЧХ к 0, колебания находятся в противофазе (сдвинуты по фазе на π ) по отношению к возмущающей силе. 17. Влияние на АЧХ параметров рессорного подвешивания (жесткости и диссипации). Правило выбора параметров рессорного подвешивания. 17.1) Графики, характеризующие влияние жесткости РП на АЧХ перемещений и ускорений при постоянных значениях массы и коэффициента диссипации:
При увеличении жесткости РП, увеличивается частота собственных колебаний, соответственно изменяется частота резонанса и увеличивается амплитуда колебаний. Большая жесткость РП (Ж2) значительно усиливает входное возмущение. Из АЧХ ускорений (рис. 5.1, б) видно, что снижение жесткости понижает общий уровень АЧХ, тем не менее, проис- ходит увеличение амплитуды ускорений в после резонансной зоне. Для улучшения динамических качеств ПС следует снижать жесткость РП. 17.2) Рассмотрим влияние демпфирования на АЧХ перемещений и ускорений (рис. 5.2, а и б).
Увеличение демпфирования приводит к тому, что в резонансной зоне амплитуда для АЧХ перемещений и ускорений будет значительно уменьшаться, при этом собственная частота практически не изменяется. Однако это не означает, что увеличение коэффициента диссипации гасителя позволяет получить систему, обладающую лучшими динамическими качествами. Влияние коэффициента демпфирования не так однозначно как жесткости. Как видно из АЧХ ускорений (рис. 5.2, б), увеличение β приводит к уменьшению амплитуды на резонансной частоте, однако в после резонансной зоне увеличение β приводит к значительному увеличению амплитуды ускорений, а следовательно и сил в РП. 17.3) Главное правило выбора параметров РП 17.3.1) При кинематическом способе возмущения (неровность) – снижать (насколько возможно) жесткость РП, связывающую колеблющуюся массу с источником возмущения. Применительно к вертикальному РП это сводится к снижению жесткости, или, что - то же самое, к увеличению статического прогиба (до 250-300 мм), что обеспечивает собственные частоты колебаний кузова в зоне 0, 8 – 1 Гц. 17.3.2) Выбор степени демпфирования при кинематическом возмущении должен быть основан на компромиссном подходе. Отсутствие демпфирования или его малая степень приводят к возможности возникновения значительных резонансных колебаний. Введение диссипации, практически полностью подавляющей резонансы, приводит к резкому росту ускорений из-за увеличения неупругой составляющей возмущающих сил в зоне после резонансных частот. Неровности пути имеют широкий диапазон длин, чему соответствует непрерывный и широкий спектр частот кинематического возмущения, действующего одновременно как в до -, так и в после резонансной зоне. Поэтому выигрыш при выборе варианта, для которого АЧХ ускорений расположена низко в зоне резонанса, всегда несколько уменьшается из-за того, что эта кривая расположена более высоко в после резонансной зоне. 18. Случайные колебания. Характеристики стационарных случайных процессов. Реакция динамической системы. Возмущения, вызывающие колебания ПС, являются случайными (неровности на поверхности рельсов и бандажей, жесткость рельсового пути). Случайным процессом называется бесконечная совокупность функций времени, значения которых в произвольный момент времени могут быть любыми (являются случайными величинами). Случайная величина — это величина, которая принимает в результате опыта одно из множества значений, причём появление того или иного значения этой величины до её измерения нельзя точно предсказать. Отдельная функция времени из совокупности представляет собой реализацию случайного процесса (графическое изображение). Стационарный случайный процесс - процесс, протекающий во времени приблизительно однородно и имеющий вид непрерывных случайных колебаний вокруг некоторого среднего значения, причем ни средняя ампли- туда, ни характер этих колебаний не меняется существенно с течением времени. Для описания этих совокупностей используются функции: 1. Математическое ожидание случайной функции называется наиболее ожидаемая величина. 2. Дисперсия- характеризует разброс или рассеивание относительно мат. ожидания(среднего). Площадь. 3. Среднеквадратическое отклонение – рассеивание случайной величины относительно мат. ожидания. Отклонение. 4. Спектр колебательного процесса. Если какой либо колебательный процесс представляется в виде суммы гармонических колебаний различных частот (так называемых “гармоник”), то функция, описывающая распределение амплитуд по различным частотам называется спектром колебательного процесса. 5. (в методе есть этот пункт, а в лекциях нет) Корреляционная функция характеризует степень зависимости между сечениями случайной функции, относящимися к различным моментам времени. Корреляционной функцией случайной функции называется неслучайная функция двух аргументов, которая при каждой паре значений равна корреляционному моменту соот-ветствующих сечений случайной функции. Это степень " похожести" функций. Например, есть парабола, а есть, скажем, график тангенса. " Памыдор знаешь, да? Са-авсэм не похож". То есть между ними практически нет никакой корреляции, каждая функция сама по себе изменяется. А вот если взять, скажем, периодический меандр (прямоугольные импульсы) и синус - то между ними (при одинаковом или кратном периоде) уже очень сильная корреляция. Вот корреляционная функция от двух заданных функций (меандр и синус, например) и показывает, насколько поведение одной функции близко поведению дру- гой. Чем ближе к 1 - тем более похоже функции одна на другую. 19. Случайные колебания. Функция спектральной плотности (ФСП) эквивалентной геометрической неровности. Методика расчета показателей динамических качеств (ПДК) ПС (правило 3-х сигм). Возмущения, вызывающие колебания ПС, являются случайными (неровности на поверхности рельсов и бандажей, жесткость рельсового пути). 19.1) Физический смысл ФСП неровности состоит в том, что она характеризует распределение энергии случайного процесса по частотам спектра и может рассматриваться как плотность дисперсии. Данная энергия подается в динамическую систему и играет роль возмущения для динамической модели. (как я понял она показывает где примерно будет неровность) Спектральная плотность выходных координат линейной динамической системы (реакция динамической системы на входное возмущение) определяется как квадрат АЧХ системы умноженной на ФСП неровности. Непостоянство свойств пути по длине практически эквивалентно некоторой случайной геометрической неровности. Все это позволяет в качестве возмущающей функции принять некоторую эквивалентную геометрическую неровность, которая приближенно учитывает все причины, вызывающие появления колебаний ПС. Статистические характеристики эквивалентной геометрической неровности получают экспериментально 19.2) Методика расчета показателей динамических качеств (ПДК) ПС (ПДК- случайные процессы) Для оценки динамических качеств вагонов обычно рассчитывают: максимальные перемещения и ускорения кузова, коэффициенты динамики первой и второй ступеней рессорного подвешивания, коэффициенты плавности хода. Максимальные значения случайных процессов ПДК можно определять как утроенное значение среднеквадратического отклонения (правило трех сигм) Правило трех сигм гласит, что максимальные значения ПДК с вероятностью P = 0, 997 будут находиться не далее, чем 3 сигмы в ту или иную сторону от среднего значения (или 997 значений из 1000). Формула для определения ПДК по правилу трех сигм в общем виде 2 0 0 ПДК сигма дисперсия реакция АЧХ ФСП:
Схема расчета ПДК: Показатели, характеризующие поведение ПС как механической системы при движении по рельсовому пути называют показателями динамических качеств (ПДК ), так как определяющую роль при этом играют колебательные процессы Поперечная устойчивость ПС Для пассажирского ПС обеспечение указанного требования достигается применением пружин возможно большей гибкости (большой статический прогиб) и соответствующих гасителей. Однако возможность увеличения статического прогиба ограничена конструктивными особенностями и особенно необходимостью обеспечить поперечную устойчивость кузова на упругих элементах. Источниками боковых колебаний кузова являются: различные по вели- чине и характеру вертикальные неровности двух рельсовых нитей. Расчеты показывают, что для обеспечения устойчивости ПС должно выполняться условие: mк - масса кузова вагона; h - расстояние ЦТ кузова от оси КП; b - расстояние между рессорами в поперечном сечении.
Для обеспечения устойчивости кузова при боковых колебаниях необходимо выбирать приведенную жесткость рессорного подвешивания, которая должна быть тем больше, чем выше расположен центр тяжести кузова, больше его масса и меньше расстояние между рессорами в поперечном сечении. Если приведенную жесткость РП принять мало отличающейся от Устойчивость пути по ширине Этот показатель характеризует качество крепления рельса к шпале. Невыполнение этого условия вызывает отрыв рельса от шпалы и, как следствие, уширение (расшивку) рельсовой колеи. Условие устойчивости записывается в виде Yш ≤ [Yш ], где [Yш ] - допустимое боковое давление рельса на шпалы, равное 40-45 кН.
Основные узлы механической части ПС. Принцип разделения масс. Механическая часть состоит: 1. Самый крупный по массе и объёму узел локомотива или моторного вагона – кузов, служит для размещения оборудования, бригады или пассажиров и защиты их от внешних воздействий. 2. Рама тележки – передача всех вертикальных, продольных и поперечных сил между кузовом и колёсными парами, а так же передачу сил тяги и торможения. К раме крепится тяговый привод и тормозные устройства. 3. Колёсная пара – для передачи нагрузок от электровоза на путь и обратно, участвует в процессе создания силы тяги и торможения. 4. Подшипниковый узел – служит для беспрепятственного вращения колёсной пары относительно не вращающихся частей. 5. Тяговый привод – для создания силы тяги, включающий в себя тяговый двигатель с устройствами управления и тяговую передачу, приводящую во вращение движитель – колёсную пару. 6. Для передачи силы тяги на прицепную часть поезда используют упряжные приборы. 7. Локомотив оснащается тормозными устройствами. Кроме этого современные электровозы содержат: рессорное подвешивание (1 или 2 ступени), узлы опирания кузова на тележки и передачи продольных сил между тележкой и кузовом, квазиупругие поперечные связи между ними, поворотные устройства. Принцип разделения масс При движении колес подвижного состава по рельсам между ними возникают динамические нагрузки. Данные нагрузки имеют негативную особенность, которая связана с тем, что при увеличении скорости движения силы взаимодействия возрастают до достаточно большой величины, превышающей силу давления колеса на рельс. Это влияет на безопасность движения колеса по рельсу и не должно допускаться. Однако уменьшить динамические силы можно через уменьшение массы электровоза, но это может привести к уменьшению реализуемой силы тяги по сцеплению колеса с рельсом. Вес Локомотива не изменяется, а его масса делится на несколько отдельных масс, которые соединены между собой упругими элементами. Такое разделение принято называть – «принципом разделения масс». Суть: Для обеспечения нормального сцепления с одновременным уменьшением динамических нагрузок Для перевозки больших масс - вес локомотива распределяют на несколько раздельных масс, которые соединяются между собой упругими элементами. (чтобуменьшить динамическое воздейстивие на путь, при этом не уменьшая тяговые усилия (которые зависят от массы локомотива).) 2. Основные задачи исследования динамики ПС. Динамические характеристики ПС. Основные задачи динамики локомотивов Динамика локомотива – физический процесс возникновения сил, моментов, перемещений составных частей локомотива, вследствие взаимодействия его ходовых частей и верхнего строения пути (ВСП), а также локомотивов и вагонов в движущимся поезде. Основная задача исследования динамических процессов в системе «ПС - путь» заключается в том, чтобы определить оптимальные значения параметров этой системы (габаритные размеры, масса, жесткость и т. п.), при которых снижаются колебания и динамические силы, отрицательно влияющие на конструкции ПС и пути. Этому должны предшествовать решения задач по: - исследованию колебательных процессов ПС и его отдельных частей, - установление критериев для оценки плавности его хода, - устойчивости против схода с рельсов, - опрокидывания и выжимания из состава поезда, - анализ способов подавления извилистого движения ПС, - вибраций их элементов, возникающих вследствие взаимодействия ходовых частей ПС и пути, а также ПС между собой и с локомотивами в составе поезда. К динамике ПС примыкают и такие вопросы, как борьба с шумом в пассажирских вагонах, вопросы вибрации элементов ПС и некоторые другие. Под параметрами понимают – габаритные размеры, массы, жесткости элементов связи. Для определения оптимальных параметров необходимо исследование колебательных процессов локомотива и его отдельных частей, установление критериев для оценки плавности хода, критериев устойчивости против схода с рельсов, критериев вибрации элементов. С точки зрения динамики механическая часть локомотива должна удовлетворять следующим требованиям: · обеспечивать устойчивость движения экипажа; · удовлетворять требованиям к качеству механической части. Совокупность методов решения перечисленных задач и представляет собой содержание науки “Динамика ЭПС”.
Популярное:
|
Последнее изменение этой страницы: 2016-07-13; Просмотров: 4370; Нарушение авторского права страницы













 . (6.8)
. (6.8) , (6.9)
, (6.9) , (6.10)
, (6.10) . (6.11)
. (6.11) . (6.12)
. (6.12) . (6.13)
. (6.13) . (6.14)
. (6.14) с обобщенной координатой (вертикальное перемещение z).
с обобщенной координатой (вертикальное перемещение z). .
.





 наблюдается пик АЧХ (точка 2) и частоту называют резонансной. При резонансе значительно возрастают амплитуды колебаний и для их ограничения используются гасители колебаний.
наблюдается пик АЧХ (точка 2) и частоту называют резонансной. При резонансе значительно возрастают амплитуды колебаний и для их ограничения используются гасители колебаний.