|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ И УСТРОЙСТВА
Любые сложные САУ могут быть представлены как совокупность более простых элементов. Для исследования процессов в реальных САУ пользуются идеализированными схемами, которые описываются математически и приближённо характеризуют реальные звенья систем в заданном диапазоне частот сигналов. В связи с чем в теории автоматики вводятся типовые звенья, характеризующиеся, вне зависимости от их конструкции, назначения, принципа действия, только своими передаточными функциями. Классифицируют их по видам дифуравнений, описывающих их работу. Следовательно, в линейных САУ различают: 1. Описывающиеся линейным алгебраическим уравнением относительно входного сигнала (пропорциональное или безынерционное, запаздывающее, дифференцирующее); 2. Описывающ-ся дифуравн-ями первого порядка с постоянными коэффициентами (инерционно-дифференцирующее или реально- дифференцирующее, инерционное или апериодическое, интегрирующее или астатическое, интегро-дифференцирующее или упругое); 3. Описывающееся дифуравне-ниями второго порядка с постоянными коэффициентами (колебательное и апериодическое). Измерительное устройство регулятора, как и всякое звено контура регулирования, характеризуется зависимостью между выходной и входной величинами в установившемся и переходном режимах. В установившемся режиме эта зависимость характеризует статическую характеристику устройства. Желательно, чтобы статическая характеристика измерительного устройства в рабочем диапазоне изменения регулируемой величины была линейной. Измерительное устройство по сравнению с объектом управления (ОУ) должно иметь минимальные запаздывание и постоянную времени. Мощность, развиваемая измерительным устройством, должна быть больше мощности, необходимой для перемещения регулирующего органа (РО) регулятором прямого действия, или достаточной для нормальной работы регулятора непрямого действия. Тип измерительного устройства автоматического регулятора определяется: 1. Видом регулируемого параметра (давление, температура, скорость и т. п.); 2. Физической природой преобразуемого сигнала (температура среды в электрический импульс, в механическое воздействие и т.д.); 3. Требуемой точностью поддержания регулируемого параметра; 4. Зависимостью показаний от условий измерения (запыленность среды, вибрация и т. п.). Принцип действия, особенность конструкции и характеристики устройств, применяемых в практике автоматизации ТП СХП: 1. Измерения давления и разрежения, 2. Температуры, 3.Уровня, 4. Расхода, 5.Перемещения, 6. Частоты вращения ( таблица ). Измерение давления и разрежения. Его проводят в основном с помощью механических устройств (пружины, мембраны, сильфоны), деформируемых или перемещаемых на величину, пропорциональную величине измеряемого параметра. Статическая характеристика устройств этого типа: S=Fp/K, где F-эквивалентная площадь упругого элемента, м2; р-контролируемое давление, Н/м2; К-жесткость упругого элемента, м/Н.
Динамические характеристики механических измерителей давления описываются передаточной функцией (ПФ) инерционного или, если масса подвижных частей значительна, колебательного звена, при этом постоянная времени инерционного звена Т=η /К, где η -коэффициент трения среды, давление которой измеряют в Н·с/м2. Для измерения разности давлений используют дифференциальные манометры, выходная величина S которых пропорциональна разности контролируемых давлений р1—р2. Механические измерители применяют для контроля давления от 10-2 до 100 МН. Для очень малых давлений удобны колокольные манометры. В динамическом отношении они также эквивалентны механическим и имеют коэффициент преобразования измерителя: К = 0, 1(FC/FKρ ), где FC и FK— площади сосуда и стенок колокола, м2; ρ — плотность жидкости, кг/м3. Измерение температуры. Его проводят на основе зависимости некоторых физических параметров измерителя от температуры ( табл ). Работа этой группы преобразователей основана на тепловом расширении твердых тел, жидкостей или газов (биметаллические, дилатометрические, манометрические измерители), на изменении сопротивления проводников и полупроводников (терморезисторы) или изменении термоЭДС, возникающей в двух проводниках разной физической природы при наличии разности температур в точках их соединения (термопара). Диапазон измерения металлических: платиновых терморезисторов от -220 до 500 °С, медных от -50 до 180°С. Статическая характеристика их в рабочем диапазоне измеряемых температур практически линейна. Коэффициент преобразования для медных гр.50М-0, 214, 100M-0, 428, платиновых гр.50П-0, 196, 100П-0, 391 Ом/°С. Полупроводниковые терморезисторы используют для измерения температуры от -90до180°С. В отличие от металлических их статическая характеристика нелинейная, коэффициент преобразования (крутизна) с увеличением t0-ры падает. Существенный их недостаток - отсутствие взаимозаменяемости, т.к. градуировка у них индивидуальна. Термоэлектрические измерительные преобразователи (термопары), как и металлические терморезисторы, имеют линейную статическую характеристику. Коэффициент преобразования самых распространенных из них: хромель-алюмель — 41·10-3 мВ/°С; хромель-копель — 69, 5·10-3 мВ/°С; медь-константан — 47, 5·10-3 мВ/°С. Диапазон измерения хромель-алюмелевых термопар от -50÷ 100°С, а хромель-копелевых от -50÷ 600°С. В динамическом отношении передаточные функции измерителей температуры распространенных типов могут быть аппроксимированы последовательно включенными инерционным и запаздывающим звеньями и описываются передаточной функцией W(p) = (k/Tp+1)e-pτ , где параметры k, Т и τ в основном зависят от конструкции преобразователя (например, для термопар - от толщины и длины металлической гильзы (чехла), защищающей измерительный преобразователь от механических воздействий или от контактов с измеряемой средой). Так, постоянная времени Т находится обычно в диапазоне от 2 до 10 мин. Работа дилатометрических и биметаллических измерительных преобразователей основана на различии коэффициентов теплового расширения твердых тел, из которых выполнены чувствительные элементы. В первых по значению перемещения свободного конца стержня S судят о температуре t измеряемой среды. Во вторых БП свободный конец его изгибается в сторону металла обычно с меньшим коэффициентом линейного расширения, статическая характеристика которого нелинейная, а его динамические характеристики соответствуют характеристикам инерционного звена. В манометрическом преобразователе изменение температуры окружающей среды t вызывает изменение давления в замкнутой системе, заполненной жидкостью, парожидкостной смесью или газом. По значению перемещения конца манометрической пружины S судят о температуре среды, в которую помещён термобаллон, статическая характеристика его также нелинейная, а динамически он подобен инерционному звену. Класс точности манометрических термометров составляет 1, 0...2, 5. Диапазон измеряемых температур -160...600°С. Длина капилляра, связывающего термобаллон с манометрической пружиной, до 60 м. Измерение уровня. Чаще всего его осуществляют с помощью поплавка, плотность которого меньше плотности жидкости, или погружного поплавка, плотность которого больше, чем плотность жидкости ( табл ). В первом случае поплавок следит за уровнем жидкости, во втором устройство действует по принципу измерения выталкивающей силы, действующей на поплавок. Применяются также измерители, использующие массу сосуда с жидкостью, гидростатическое давление или зависимость электрического сопротивления от уровня контролируемой жидкости. В динамическом отношении измерители уровня эквивалентны колебательным звеньям или безынерционным звеньям W(p)=S(p)/h(p)=Kh с коэффициентом преобразования К, определяемым конструкцией устройства. Измерение расхода. Это одно из самых сложных и ответственных видов измерений ( табл ). Расход измеряют в массовых (m, кг/с) или объемных (V, м3/с) единицах. Связь между ними определяется соотношением m = Vρ, где ρ - плотность измеряемой среды, кг/м3. Расход жидкости или газа при ρ = const можно измерить с помощью специально устанавливаемого в трубопроводе сужающего устройства, перепад давления ∆ p на котором пропорционален расходу среды. Этот перепад измеряется дифференциальным манометром. Расходомер этого типа называют дроссельным. В динамическом отношении он эквивалентен безынерционному звену с коэффициентом преобразования K=C Для измерения количества вещества G, кг, используют скоростные или объемные счетчики, рабочий орган которых — крыльчатка, вращаемая потоком жидкости. Количество среды, прошедшей через трубопровод, пропорционально частоте вращения крыльчатки, измеряемой интегрирующим прибором. Принцип действия у счетчиков количества газа аналогичен, но их рабочий орган имеет иную конструкцию, например в виде двух вращающихся овальных шестерен. Объемный расход жидкости или газа можно также определить по скорости их движения с помощью пневмометрической трубки. Последнюю располагают по оси трубопровода навстречу потоку. Она воспринимает динамический напор ∆ p, равный разности между полным и статическим напором. Динамический напор измеряют дифференциальным манометром. Он служит для вычисления скорости в измеряемой точке сечения. Устройства этого типа используют для измерения расхода жидкостей или газов в трубопроводах больших диаметров и некруглого сечения. Измерение перемещения. Осуществляют с помощью датчиков потенциометрического типа, разных электромашинных устройств или индуктивных преобразователей ( табл ). Такого типа преобразователи включают в мостовую схему, питаемую постоянным или переменным током. Электромашинный преобразователь — сельсин представляет собой миниатюрную электрическую машину, состоящую из статора и ротора. На статоре обычно располагают три обмотки, сдвинутые в пространстве на 120° по отношению одна к другой; а на роторе - одну. При использовании сельсинов в трансформаторном режиме одноименные зажимы обмоток статоров сельсинов датчика и приемника соединяют между собой. На обмотку ротора сельсина-датчика подают напряжение переменного тока UП, а с ротора сельсина-приемника снимают напряжение U, значение которого пропорционально синусу угла рассогласования роторов. При этом согласованным является положение, при котором оси обмоток роторов сельсинов сдвинуты на 90°. Дифференциально-трансформаторные преобразователи имеют три обмотки, одна из них, первичная, питается переменным током UП, а две другие, вторичные, включены навстречу одна другой. При среднем положении плунжера напряжение U, индуцируемое во вторичных обмотках, равно нулю. При отклонении плунжера от среднего положения на выходе датчика появляется напряжение переменного тока, значение и фаза которого зависят от значения и направления отклонения. У таких преобразователей статическая характеристика в пределах рабочего диапазона линейна. Представляют собой универсальные преобразователи перемещения в электрический сигнал для большой группы измерителей расхода, давления, уровня и других параметров. В динамическом отношении все преобразователи перемещения представляют собой безынерционные звенья. Коэффициент их преобразования K= UП(RH/(RH+0, 5R)), где UП — напряжение питания схемы, В; RH — сопротивление нагрузки, Ом; R — полное сопротивление преобразователя, Ом. Коэффициент преобразования, В/рад, сельсинной пары в трансформаторном режиме K = Umax/57, 3, где Umax – максимальное выходное напряжение, В. Коэффициент преобразования, В/мм, дифференциально-трансформаторного преобразователя K= (2w2/w1)(U/SВХ), где w1 и w2 — число витков первичной и вторичной обмоток преобразователя; SВХ — значение входной величины. Измерение частоты вращения. Его проводят с помощью механических, гидравлических, индукционных, частотных и электрических устройств ( табл ). К механическим измерителям частоты вращения относят центробежные тахометры, при вращении вала которых на грузы действует центробежная сила, под действием которой они расходятся, деформируя пружину и перемещая муфту. В динамическом отношении центробежные тахометры — колебательные звенья. Параметры их передаточных функций зависят от конструкции измерительного устройства. К механическим измерителям относят также гироскопы. Гидродинамические измерители преобразуют угловую скорость вращения в давление жидкости, создаваемое насосом. В индукционных измерителях входной вал соединен с постоянным магнитом. При вращении магнита в металлическом диске индуктируется ЭДС, которая порождает вихревые токи. От их взаимодействия с полем постоянного магнита возникает момент вращения, значение которого пропорционально частоте вращения входного вала. Действие электромашинных измерителей частоты вращения (электрических тахометров) основано на зависимости развиваемой генератором постоянного тока ЭДС U от частоты вращения ротора п. В динамическом отношении электрический тахометр подобен безынерционному звену с коэффициентом преобразования К=kKФ, где kK — коэффициент, зависящий от конструкции: числа пар полюсов, числа проводников обмотки якоря и числа параллельных ветвей; Ф — магнитный поток, Вб. Обычно значение коэффициента передачи тахогенератора находится в пределах 0, 06…1, 15 В·с/рад. При измерении частоты вращения рабочих органов мобильных сельскохозяйственных агрегатов часто применяют импульсные измерители скорости, преобразующие угловую скорость в частоту следования импульсов некоторого значения (тока, светового потока, излучения и т.д.). В динамическом отношении эти измерительные устройства также подобны безынерционному звену с коэффициентом передачи К= п/2π, где п — число зубцов или отверстий вращающегося диска. АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ Устройство, которое воспринимает разность между текущим и заданным значениями регулируемой величины и преобразует ее в воздействие на РО в соответствии с заложенным в регулятор законом регулирования, называют автоматическим регулятором. Элементами типового регулятора являются измерительный преобразователь, задатчик, усилитель и собственно регулирующее устройство, которое вырабатывает сигнал рассогласования текущего и заданного значения регулируемой величины, усиливает его и корректирует в соответствии с законом регулирования, вырабатывая сигнал регулирующего воздействия. Большинство САР включает ещё ИМ, преобразующий командный сигнал от регулятора в соответствующее воздействие на РО. Основные типы регуляторов – позиционные и непрерывного действия. Последние, в свою очередь, делят на пропорциональные (П), пропорционально-интегральные (ПИ) и пропорционально-интегрально-дифференциальные (ПИД) регуляторы (таблица ХАР).
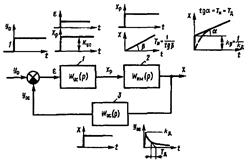
Пропорциональный (П) регулятор. Он перемещает РО на значение х, пропорциональное отклонению регулируемой величины у от заданного значения. Дифференциальное уравнение регулятора (р – запись в операторной форме): х(р)= kpy(p). Таким образом в динамическом отношении П-регулятор подобен безынерционному (пропорциональному) звену. Параметр настройки П-регулятора – коэффициент пропорциональности kp, равный перемещению РО х при отклонении регулируемой величины у на единицу ее изменения. При выборе структурной схемы любого реального регулятора, в том числе и пропорционального, решающее значение имеет передаточная функция (ПФ) исполнительного механизма, которая может соответствовать ПФ интегрирующего или пропорционального звена. К первой группе относятся электродвигательные ИМ, обеспечивающие постоянную скорость перемещения РО, ко второй – пневматические мембранные ИМ, у которых перемещение РО пропорционально регулирующему воздействию. Структурная схема П-регулятора с ИМ первого типа приведена на рисунке 1, а. Закон регулирования формируется с помощью отрицательной обратной связи (ОС) по положению РО, т.е. на вход устройства ОС WOC(p) поступает сигнал х с преобразователя перемещения ИМ. В соответствии с правилами преобразования структурных схем ПФ регулятора имеет вид: WP(p) = x(p)/y(p) = [Wус(p) WИМ(p)] / [1 + Wус(p) WИМ(p) Wос(p)]. При большом коэффициенте усиления WУС(p) ПФ упрощается WP(p) ≈ [1 / Wос(p)]. Для того чтобы последняя была тождественна ПФ идеального П-регулятора WP(p)= kp, необходимо выполнить условие W(р) = 1/ kp.
Таким образом, ОС должна быть выполнена в виде безынерционного звена с коэффициентом усиления kОС = 1/kp. Такую ОС называют жесткой. Соответственно, параметр настройки П-регулятора – коэффициент пропорциональности kp задается параметрами звена ОС.
а) б) Рисунок 1 – Структурные схемы П-регулятора (а) и И-регулятора (б) 1 – усилитель, 2 – исполнительный механизм, 3 – цепь обратной связи
Переходная характеристика реального П-регулятора несколько отличается от характеристики идеального в начальной своей части из-за ограниченной скорости ИМ. Пропорциональные регуляторы позволяют устойчиво работать практически в любых технологических системах. Однако их недостаток—зависимость регулируемой величины от нагрузки объектов. Интегральный (И) регулятор. Он перемещает РО пропорционально интегралу от сигнала рассогласования. Уравнение регулятора (в операторной форме) х(р)= [kp1/р] у(р). Т.о., в динамическом отношении И-регулятор подобен интегрирующему звену. Параметр настройки И-регулятора kp1 – коэффициент пропорциональности характеризует зависимость скорости перемещения регулирующего органа от значения отклонения регулируемого параметра. Структурная схема серийного П-регулятора показана на рисунке 1, б. ПФ элементов схемы определяются следующими выражениями: Wyc(p)=k> 1; W(p)= [1/(TИ р+1)]; WOC1(p) = WOC2(p) = 1. Передаточная функция всей схемы: W(p)=[Wyc(p)W(p) / (1+Wyc(p)WOC1(p)–Wyc(p) W(p)WОС2(p)]. После подстановки в последнюю формулу значений ПФ из предпоследних формул, деления числителя и знаменателя на k и отбрасывания за малостью 1/k получаем ПФ И-регулятора (ТИ – постоянная времени ИМ, величина, обратная kp1): W(p) = 1/TИ p. И-регуляторы поддерживают параметр без его отклонений, однако могут устойчиво работать только на объектах, имеющих значительное самовыравнивание. Пропорционально-дифференциальный (ПД) регулятор. Он перемещает РО на значение х, пропорциональное сумме отклонения и скорости (дифференциала) отклонения регулируемой величины у(р). Уравнение регулятора (в операторной форме): x(p) = kp(1 + TД р) y(p). Т.о., в динамическом отношении ПД-регулятор подобен системе из двух параллельно включенных звеньев: безынерционного с коэффициентом пропорциональности kp и дифференциального с коэффициентом kpTД. Пропорционально-интегральный (ПИ) регулятор перемещает РО на величину х, пропорциональную сумме отклонения и интеграла от отклонения регулируемой величины у. Уравнение его (в операторной форме): х(р) = kp[1+ (1/ TИ p)] у(р). Т.о., в динамическом отношении ПИ-регулятор подобен системе из двух параллельно включенных регуляторов: пропорционального с коэффициентом пропорциональности kp и интегрального с коэффициентом пропорциональности kp/TИ. Отсюда следует, что у ПИ-регулятора два параметра настройки: коэффициент пропорциональности kp и время удвоения TИ. Структурная схема ПИ-регулятора показана на рисунке 2 в двух вариантах: с охватом (а) и без охвата (б) ИМ отрицательной ОС.
а) б) Рисунок 2 – Структурные схемы ПИ-регулятора с охватом (а) и без охвата (б) ИМ цепью отрицательной обратной связи: 1 – усилитель, 2 – исполнительный механизм, 3 – цепь обратной связи
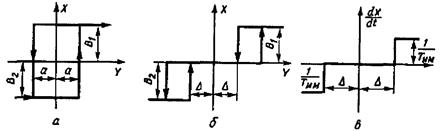
В первом варианте (рис. 2, а) устройство ОС должно иметь характеристику реального дифференцирующего звена: WOC(p) = kд (Tд p / Tд p + 1), где kд и Tд – коэффициент усиления и постоянная времени дифференцирующего звена. Тогда, как было отмечено ранее, при достаточно большом коэффициенте усиления Wyc(p) ПФ регулятора: WР(p) = [(1/ kд) · (Tд p + 1 / Tд p)], или WР(p) = kР [(Tи p + 1) / Tи p], если принять Tд = Tи и kР = l/ kд. Т.о., в первом варианте исполнения регулятора ПФ исполнительного механизма не влияет на формирование закона регулирования, который полностью определяется характеристикой устройства ОС. В серийных ПИ-регуляторах этого типа в качестве ОС используют различные электрические, пневматические или гидравлические устройства – аналоги реально дифференцирующего звена. Такую ОС называют упругой или гибкой. Во втором варианте исполнения ПИ-регулятора (рис. 2, б) возможны два случая, когда исполнительный механизм имеет характеристику интегрирующего или пропорционального звена. В обоих случаях при достаточно большом коэффициенте усиления Wyc(p) имеем WР(p) = [1 / WOC(p)] WИМ(p). Если WИМ(p) = 1/Тос р, а ОС выполнена в виде апериодического звена 1-го порядка Wос(p) = kос / (Тос р + 1), то получаем ПФ ПИ-регулятора: WР(p) =[(1/ kос)·(Tос p+1 / Tос p)] = kР [(Tи p + 1) / Tи p], где оба параметра настройки kР = 1/ kос и Tи= Tос также определяются параметрами узла ОС. Если у ИМ характеристика пропорционального звена, то для реализации ПИ-регулятором закона регулирования звено ОС должно иметь характеристику реального дифференцирующего звена. При увеличении постоянной времени ТИ такой ПИ-регулятор превращается в П-регулятор, а устройство ОС — в безынерционное звено. В большинстве серийно выпускаемых электрических регуляторов, использующих ИМ с постоянной скоростью перемещения и имеющих структурную схему (рис. 2, б), в качестве второй ступени усиления используют трехпозиционный релейный элемент. Такой принцип реализован в большом числе регуляторов, используемых в сельскохозяйственном производстве (Р-25, РС-29, РП-4 и др.). ПИ-регуляторы, отличаясь простотой конструкции, обеспечивают высокое качество стабилизации параметра независимо от нагрузки объекта. Пропорционально-интегрально-дифференциальный (ПИД) регулятор перемещает РО пропорционально отклонению, интегралу и скорости отклонения регулируемой величины. Уравнение регулятора (в операторной форме): x(p) = kР [1 + 1/Tи p + Tд p] у(p). Т.о., в динамическом отношении ПИД-регулятор подобен системе из трех параллельно включенных звеньев: пропорционального, с к-том пропорциональности kР, интегрального, с kР/Tи и дифференцирующего – с kРTд. Соответственно, у ПИД-регулятора параметров настройки три: коэффициент пропорциональности kР, время интегрирования Ти и время дифференцирования Tд. На практике аналоговый ПИД-регулятор выполняют по той же структурной схеме, что и ПИ-регулятор (рис. 2, а), но устройство ОС WОС(р) в этом случае должно иметь ПФ вида апериодического звена второго порядка. Обычно ПИД-закон регулирования реализуют путем включения последовательного корректирующего устройства в виде интегрально-дифференцирующего звена. Позиционный (релейный) регулятор вырабатывает сигнал, который перемещает РО в одно из фиксированных положений (позиций). Этих положений может быть два, три и более, соответственно различают двух-, трех- и многопозицонные регуляторы. Уравнение САР с таким регулятором определяется статической характеристикой регулятора (на рисунке 3, а…в). Наиболее распространенной из рассматриваемой группы регуляторов является – двухпозиционный (рисунок 3, а).
Величина 2а определяет зону неоднозначности регулятора. При изменении входной величины у (она же – выходная величина объекта) относительно заданного значения на а выходная величина х (регулирующее воздействие) скачком достигнет своего максимального значения В1. При уменьшении х на то же значение а выходная величина также скачком достигнет значения В2, причем в общем случае В1 ≠ В2. Т.о., двухпозиционные регуляторы имеют два параметра настройки: зона неоднозначности 2а и регулирующее воздействие В. Характерная особенность системы регулирования с двухпозиционным регулятором — автоколебательный характер изменения регулируемой величины у. Параметры автоколебаний — амплитуда АК и период Т зависят от свойств объекта регулирования (Тоб, Коб, τ ) и параметров настройки регулятора. Трехпозиционные регуляторы (рис 3, б) в отличие от двухпозиционных кроме двух устойчивых положений — «больше» В1 и «меньше» В2 — обеспечивают еще и третье — «норма». Органы настройки трехпозиционного регулятора позволяют устанавливать зону нечувствительности 2∆ и значение регулирующего воздействия В. Преимущества трехпозиционного регулирования перед двухпозиционным заключаются в отсутствии автоколебаний при изменении –∆ < у < +∆ и малом значении амплитуды колебаний регулируемой величины. Позиционные регуляторы могут работать также и с ИМ, обеспечивающими постоянную скорость перемещения РО. Статическая характеристика такого регулятора приведена на рисунке 3, в. В соответствии с этой характеристикой скорость перемещения РО dx/dt изменяется скачкообразно, достигая значения 1/Тим, где Тим — время полного хода ИМ. Релейные регуляторы кроме зоны нечувствительности имеют также и зону неоднозначности. Системы автоматического регулирования (САР) с позиционными регуляторами применяют при автоматизации ТП сельскохозяйственного производства. Это стало возможным благодаря таким их преимуществам, как простота технических способов управления энергетическими потоками, удобство сочетания релейного элемента с ИМ постоянной скорости, перемещающим РО, а также благодаря дешевизне, надежности и простоте настройки самих регулирующих устройств.
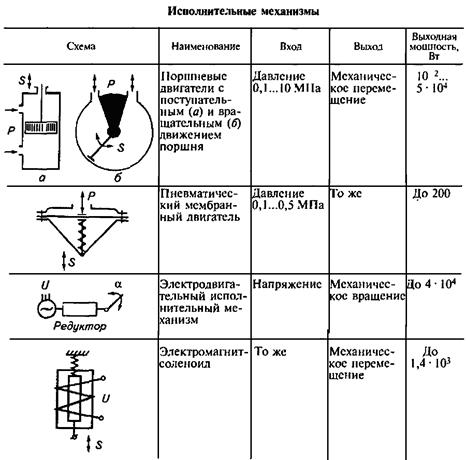
ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ
Устройство, преобразующее управляющий сигнал регулятора в перемещение РО, называют исполнительным механизмом. Такое устройство обычно состоит из исполнительного двигателя, передаточного или преобразующего узла (например, редуктора), а также систем защиты, контроля и сигнализации положения выходного элемента, блокировки и отключения. Передаточная функция ИМ входит в ПФ регулятора, и потому ИМ должен обладать достаточным быстродействием и точностью, с тем чтобы осуществлять перемещение РО с возможно меньшим искажением закона регулирования. Наиболее характерна классификация ИМ по виду потребляемой энергии (таблица) на гидравлические, пневматические и электродвигательные или электромагнитные. Гидравлические ИМ состоят из управляющего и исполнительного элементов. Обычный вариант первого элемента — золотник, второго — гидроцилиндр. Последний, в свою очередь, реализует поступательное (а-табл.) или вращательное (б-табл.) движение выходного вала. В гидравлических ИМ входная величина — перемещение управляющего устройства или давление жидкости на поршень р, а выходная — перемещение (поворот) выходного вала S. Постоянная времени реального гидравлического ИМ при больших скоростях перемещения поршня сильно возрастает, что объясняется резким увеличением сил поршня вязкого трения, но все-таки с достаточной точностью его характеристики совпадают с характеристиками интегрирующего звена, постоянная времени которого прямо пропорциональна площади поршня и обратно пропорциональна Гидравлические ИМ обладают очень большим быстродействием и выходной мощностью, и потому их применяют в системах автоматизации мобильных сельскохозяйственных машин и агрегатов.
Пневматические ИМ. По устройству аналогичны гидравлическим. Они получили широкое распространение благодаря высокой надежности, простоте конструкции и возможности получения достаточно больших усилий. Крутизна статической характеристики пневматического ИМ находится в прямой зависимости от площади мембраны и в обратной — от коэффициента жесткости пружины (несколько возрастает по мере ее сжатия). Соответственно, при малых изменениях выходного параметра S динамику механизма можно представить характеристиками безынерционного звена, причем коэффициент передачи которого несколько убывает с увеличением S. Общие недостатки пневматических и гидравлических ИМ — сложность операций по их наладке и, главное, необходимость специальных компрессорных (насосных) установок для их питания. Электродвигательные ИМ. В них используют электродвигатели постоянного и переменного тока, в том числе асинхронные двухфазные с полым ротором, с конденсаторами в цепи обмотки управления, а также асинхронные трехфазные двигатели. Исполнительные двигатели постоянного тока имеют независимое возбуждение или возбуждение от постоянных магнитов. Управляют этими двигателями, изменяя напряжение на якоре или на обмотке возбуждения (якорное или полюсное управление). В большинстве конструкций электрических ИМ применяют двухфазные и трехфазные асинхронные двигатели. Асинхронный двухфазный двигатель приближенно можно рассматривать как инерционное звено, если выходная величина — угловая скорость ротора, или как два последовательно соединенных звена — интегрирующее и инерционное, если выходная величина — угол α поворота ротора (таблица). Значение коэффициента передачи зависит от способа управления двигателем, а постоянная времени — от сигнала управления, возрастая с уменьшением пускового момента двигателя от 0, 1 до 0, 2 с (для полого ротора с обмоткой типа «беличьей клетки»). Передаточная функция асинхронного трехфазного двигателя совпадает с ПФ инерционного звена. Коэффициент преобразования и постоянную времени определяют по механической характеристике двигателя и рабочей машины. Большинство электродвигательных ИМ работает в режиме, когда скорость перемещения не зависит от значения отклонения регулируемого параметра от заданного. Такой ИМ (рисунок 1) состоит из асинхронного электродвигателя, редуктора, концевых и путевых выключателей, датчиков (преобразователей), тормозного устройства и ручного привода.
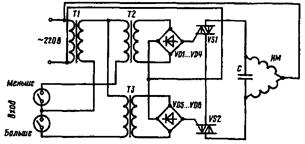
а) б) Рисунок 1 – Схемы управления ИМ а – с трёхфазным асинхронным электрическим двигателем, б – с однофазным конденсаторным электрическим двигателем
Электродвигатель с редуктором служит для преобразования электрической энергии в механическую, достаточную для перемещения РО. Концевые выключатели используют для отключения пускателя при достижении РО крайних положений, а путевые выключатели – для ограничения диапазона перемещения РО в автоматическом режиме. Датчики положения формируют сигнал, пропорциональный углу поворота выходного вала ИМ. Этот сигнал используется индикатором положения на пульте оператора, а также, возможно, в качестве сигнала ОС по положению ИМ (для формирования П-закона регулирования, например). Ручной привод обеспечивает возможность ручной перестановки РО при нарушениях работы электрической части механизма. Включение-отключение электродвигателя по команде регулирующего устройства осуществляется через посредство электромагнитного или полупроводникового релейного устройства-пускателя. Реверс электродвигателя электромагнитного ИМ с трехфазным электродвигателем обеспечивается изменением схемы подключения двух фаз. После размыкания силовых контактов (рисунок 1, а) и отключения напряжения питания электродвигателя выходной вал ИМ останавливается не сразу, а продолжает в течение некоторого времени движение по инерции. Так называемый «выбег» может существенно ухудшать качество регулирования. Уменьшают выбег с помощью тормоза, представляющего собой электролитический конденсатор С, подключаемый через размыкающие блок-контакты КМ1 и КМ2 к одной из статорных обмоток электродвигателя. В результате этого в статорной обмотке появляется ток, наводящий в статоре магнитное поле, которое, взаимодействуя с вращающимся ротором, создает противодействующий вращению тормозной момент, уменьшающий выбег ИМ. Главный недостаток электромагнитного релейного пускового устройства — невысокая надежность. Значительно лучшие характеристики имеет полупроводниковое релейное устройство (рисунок 1, б). Основу устройства составляют два тиристорных ключа на симисторах VS1 и VS2, которыми управляют с помощью сигналов «Больше» — «Меньше», вырабатываемых регулятором или оператором. Каждый из тиристорных ключей включен в цепь питания одной из статорных обмоток электродвигателя. При отсутствии управляющих сигналов тиристорные ключи разомкнуты и электродвигатель неподвижен. Включение симистора происходит в результате подачи на управляющий электрод отрицательного напряжения, вырабатываемого соответствующим выпрямительным мостом, питаемым от разделительного трансформатора Т2 (ТЗ) при наличии командного сигнала от регулятора или оператора. Трансформатор Т1 разделяет управляющие и силовые цепи. Реверсирование электродвигателя осуществляется изменением схемы подключения обмоток, при этом одна обмотка подключается к сети непосредственно, а вторая — через фазосдвигающий конденсатор С. Т.о., движение ИМ может быть описано системой уравнений, соответствующих движению ИМ в сторону открытия, неподвижному состоянию и движению в сторону закрытия,
где Тим – время, равное времени движения ИМ из одного крайнего положения в другое; ∆ – зона нечувствительности релейного устройства. Популярное:
|
Последнее изменение этой страницы: 2016-05-30; Просмотров: 1772; Нарушение авторского права страницы

 , где С-коэффициент, значение которого зависит от геометрической формы и размеров сужающего устройства, диаметра трубопровода и плотности измеряемой среды. Статическая характеристика такого измерительного устройства нелинейна.
, где С-коэффициент, значение которого зависит от геометрической формы и размеров сужающего устройства, диаметра трубопровода и плотности измеряемой среды. Статическая характеристика такого измерительного устройства нелинейна.



 , где р1 и р2 – давление нагнетания и слива рабочей жидкости.
, где р1 и р2 – давление нагнетания и слива рабочей жидкости.