|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
АВТОМАТИЗАЦИЯ ТП В ПОЛЕВОДСТВЕ
2.2.1. ОБЩИЕ СВЕДЕНИЯ
Основную долю ТП в полеводстве (предпосевная подготовка семян, клубней, обработка почвы, посев, уход за растениями, уборка урожая) выполняют мобильные сельскохозяйственные агрегаты (МСА). К ним относятся самоходные комбайны и совмещенные с трактором различные прицепные машины (орудия): почвообрабаты-вающие, посевные, для внесения удобрений, прореживания всходов СХ культур, дождевальные, уборочные и др. Повышенные требования, предъявляемые к качеству и эффективности ТП в полеводстве, а также высокая конкурентоспособность МСА диктуют необходимость решения проблемы повышения их технико-экономического и экологического уровней. МСА работают в сложных и различных почвенно-климатических условиях при многообразии случайных возмущений, различных неопределенностей, которые приводят к нарушениям энергетического и технологического режимов работы машин. Так, перегрузки и недогрузки в работе дизельного двигателя МСА приводят к перерасходу топлива, снижениям ресурса двигателя, производительности и качества работы, а также к резкому увеличению отрицательного воздействия мобильных агрегатов на оператора (водителя), почву и растения, атмосферу. Колебания скорости движения МСА снижают качество выполнения ТП, увеличивают потери технологического продукта, а буксование колес отрицательно воздействует на структуру верхнего слоя почвы, снижает расход топлива и общий тяговый КПД мобильного агрегата. Оператор одновременно с управлением МСА непрерывно контролирует ход ТП, техническое состояние агрегата, а также обеспечивает безопасность его движения. В реальных условиях работы водитель практически не в состоянии своевременно принять правильное решение (создать управляющие воздействия) при восприятии и обработке огромного потока взаимозависимой информации, превышающей его физиологические возможности. Особенно это сказывается при работе современных МСА на повышенных скоростях. Ручное управление такими агрегатами недостаточно эффективно, а потенциальные возможности их не используются в полном объеме в связи с ограничениями, вносимыми «человеческим фактором». Неизбежным и кардинальным направлением повышения технико-экономического и экологического уровней мобильных агрегатов является автоматизация контроля и управления технологическими, энергетическими и эксплуатационными режимами их работы МСА при минимальном участии человека. В то же время создание эффективных средств автоматизации, большого разнообразия МСА представляет собой непростую задачу, связанную и со специфическими особенностями их функционирования. Это работа их на открытом пространстве в условиях изменяющихся в широких пределах температуры и влажности, запыленности и загазованности, наличия значительных вибраций, шумов, а также отсутствие на МСА стабильного источника электрической энергии, низкая квалификация обслуживающего персонала. Перечисленные факторы предъявляют повышенные требования к надежности средств автоматизации мобильной техники, простоте их эксплуатации и обслуживания. Рассмотрим известные и перспективные системы автоматического контроля и управления работой МСА.
2.1.2. СИСТЕМЫ АВТОМАТИЧЕСКОГО КОНТРОЛЯ (САК) РАБОТЫ МСА 2.1.2.1. САК работы посевных агрегатов обеспечивают контроль частоты высева семян и количества технологического материала (семян, удобрений) в бункерах машин. Функциональная схема таких систем (рисунок 1) включает набор датчиков Д1...Дп контролируемых параметров установленных на посевном агрегате (объекте САК), блок усиления и преобразования сигналов датчиков (БУП) датчиков, монитор для оператора (установленный в кабине трактора или самоходного комбайна).
Рисунок 1 - Общая функциональная схема САК работы посевного агрегата
Датчики основных контролируемых параметров (уровней семян, удобрений в бункерах сеялки и частоты высева семян) имеют фотоэлектрический принцип действия и состоят из оптически связанных между собой фотоприемника (например, фоторезистора, фотодиода) и светового излучателя (например, светодиода или лампы накаливания). Системы АК имеют режим «Проверка», при котором генерируется импульсная последовательность, имитирующая сигналы датчиков при нормальном протекании технологического процесса высева семян. Электрическая схема устройства САК зерновой сеялки показана на рисунке 2. Устройство имеет 12 идентичных каналов обработки сигналов датчиков частоты высева семян. Каждый из каналов преобразования сигналов датчиков (световых излучателей 1 и фотодиодов 2) содержит усилитель 3, емкость 4 с электронным ключом 5, световой индикатор (светодиод) 7. Электронное реле 6 и блок звуковой сигнализации 8. При работе зерновой сеялки семена (поступающие из ее высевающих дисков) периодически прерывают световой поток между световым излучателем 1 и фотодиодом 2, на выходе которого вырабатываются электрические импульсы, поступающие на вход усилителя 3 соответствующего канала контроля (семяпровода) и далее на электронный ключ 5 с емкостью 4. Если период следования импульсов меньше времени заряда емкости (конденсатора), то электронный ключ 5 соответствующего канала закрыт и его световой индикатор 7 не будет светиться.
Рисунок 2 - Электрическая схема устройства САК зерновой сеялки
Если же произойдет сбой или нарушение (технологии высева семян) работы высевающего аппарата, то подача импульсов с фотодиодов 2 прекращается или их частота резко снижается. При этом емкость 4 заряжается до необходимого уровня напряжения, электронный ключ 5 срабатывает и включает соответствующий конкретному семяпроводу световой индикатор 7. Оператору с блока звуковой сигнализации 8 подается при этом прерывистый сигнал. Датчики уровня технологического материала в бункере сеялки устанавливают в его нижней части. Если, например, уровень заполнения бункера семенами (удобрением) превышает место (высоту) установки датчика, то световой поток его излучателя не попадает на соответствующий фотодиод 2 и выходной ток последнего будет минимален. Если же этот уровень ниже места установки датчика, то на фотодиод попадает световой поток, что вызывает существенное возрастание силы тока (в цепи фотодиода) и его увеличение усилителем 3 до порога включения электронного реле 6 и светового указателя 7 минимального уровня семян «С» (удобрений «У»). Устройство (на рисунке 2) в виде электронного блока выполнено в герметичном корпусе, закрепленном на сеялке и имеющем электрические разъемы для подключения датчиков и источника электрической энергии (аккумулятора МСА). Т.о., оператор, находясь в кабине трактора (комбайна), получает достоверную информацию о наличии семян или удобрений в бункерах, а также о нарушениях работы конкретных семяпроводов высевающих аппаратов. Такие САК существенно сокращают сроки сева и повышают его качество. 2.1.2. 2. САК положения рабочих органов (русел) кукурузоуборочных агрегатов (комбайнов) предназначены для обеспечения контроля положения русел (относительно рядков стеблей кукурузы) прицепных кукурузоуборочных комбайнов как в светлое, так и в темное время суток. Функционально-технологическая схема САК приведена на рисунке 3 (а-б). При движении кукурузоуборочного агрегата по рядкам кукурузы рамка копира 8 датчика, установленного на делителе среднего мыса жатки, находится в междурядье. Если приемные русла жатки комбайна отклоняются от рядков стеблей или же сами рядки имеют искривления, то копир датчика, касаясь стеблей кукурузы, отклоняется, что вызывает поворот связанного с ним посредством тросика и шкива якоря индуктивного преобразователя (выполненного по схеме дифференциального трансформатора). Якорь поворачивается на угол, пропорциональный отклонению копира. Возникающий при этом электрический сигнал поступает на усилительно-преобразующий блок (УПБ) через последовательно соединенные чувствительный элемент (ЧЭ), измерительные преобразователи (ИП) и далее на устройство отображения информации (УОИ), на лицевой панели которого расположены световые индикаторы. Число их включения пропорционально значению отклонения копира, а направление световой полосы (зеленого цвета) относительно постоянно светящейся полосы (красного цвета) соответствует значению и направлению отклонения русел комбайна от требуемой траектории движения, определяемой расположением рядков кукурузы.
Рисунок 3 - Функционально-технологическая схема САК положения русел кукурузоуборочного комбайна 1 – устройство отображения информации; 2 – усилительно-преобразующий блок; 3 – копир; 4 – демпфирующее устройство; 5 – шкив; 6 – ограничитель поворота; 7 – передающий преобразователь; 8 – рамка копира; 9 – контрольная метка; 10 – тросовый привод; 11 – ось поворота; 12 – натяжной винт; 13 – пластина; 14 – основание.
Используя такую информацию, оператор может оперативно устранять возникающие отклонения, воздействуя на рулевой механизм трактора и изменяя положение комбайна относительно рядков растений. Чувствительный элемент датчика положения русел комбайна относительно рядков растений представляет собой рамку копира (рисунок 3, в), которая может под воздействием растений кукурузы поворачиваться относительно основания 14. Рамка с ограничителем поворота 6 связана тросовым приводом 10 со шкивом 5 передающего преобразователя 7 датчика и посредством пластины 13 соединена с демпфирующим устройством 4. Ось поворота 11 рамки копира является базой ориентации машины. Изменение ее положения относительно центра междурядья приводит к повороту рамки. Исходное (нейтральное) положение поворотной рамки копира и связанного с ней шкива передающего преобразователя устанавливается натяжными винтами 12 крепления тросика на пластине 13 рамки копира. Это положение определяется по совпадению контрольной метки 9 на корпусе с указателем, расположенным на его валу.
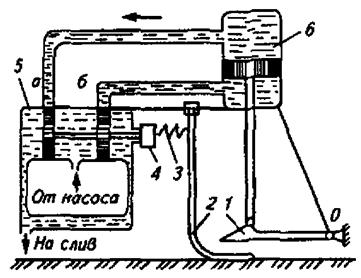
2.1.3. САУ ПОЛОЖЕНИЕМ РАБОЧИХ ОРГАНОВ МСА позволяют повысить качество и эффективность выполнения ТП, а также улучшить условия работы оператора. В частности: 1. Автоматическое управление глубиной вспашки предназначено для стабилизации глубины вспашки (хода плугов, лемехов и других рабочих органов). Практическое применение нашли силовой, высотный и комбинированный способы стабилизации глубины вспашки. Силовой способ основан на том, что тяговое сопротивление плуга зависит от глубины вспашки. При увеличении (уменьшении) тягового сопротивления специальная пружина, установленная между трактором и плугом, сжимается (разжимается) и перемещает шток и поршень управляющего гидрозолотника. При этом последний перераспределяет (под давлением от насоса) поток масла (гидравлической жидкости) в соответствующие полости силового гидроцилиндра, который осуществляет выглубление (заглубление) лемехов плуга до заданного тягового усилия. Такой способ позволяет также стабилизировать нагрузку трактора и обеспечивать экономичную работу его двигателя. Силовой способ эффективен в работе преимущественно на однородных по составу почвах при постоянной скорости движения трактора, т.е. когда тяговое усилие трактора пропорционально глубине хода лемехов плуга. Высотный способ применяют для неоднородных почв (рисунок 4).
Рисунок 4 – Схема устройства для управления глубиной вспашки 1 – плуг; 2 – опорное колесо; 3 – пружина; 4 – гидрозолотник В устройстве перед плугом 1 устанавливают опорное колесо (датчик глубины) 2, механически соединенное со штоком гидрозолотника 4. При изменении глубины вспашки шток перемещается и окна а и б гидрозолотника открываются. Через них масло под давлением поступает в гидроцилиндр, который регулирует высоту плуга, восстанавливая необходимую глубину его хода. Комбинированный способ объединяет принципы и устройства силового и высотного способов управления глубиной хода рабочих органов МСА. 2. Автоматическое управление высотой среза кормовых трав, кукурузы и другой зеленой массы применяют на сенокосилках и силосоуборочных комбайнах. Высоту среза растений устанавливают минимально допустимой, что повышает сбор зеленой массы. Для этого используют полозковый щуп 2, копирующий рельеф поля (рисунок 5).
Рисунок 5 - Схема устройства для управления высотой среза: 1 – режущий аппарат; 2 – полозковый шуп; 3 – пружина; 4 – предохранительное устройство; 5 – гидрозолотник; 6 – силовой гидроцилиндр
К поверхности поля щуп 2 прижимается пружиной 3. Если высота среза зеленой массы соответствует заданной, то окна а и б гидрозолотника 5 закрыты, а поршень силового гидроцилиндра 6 и режущий аппарат 1, жестко связанный с поршнем, находятся на постоянной высоте от поверхности поля. При изменении рельефа поля полозковый щуп 2 открывает окна а и б гидрозолотника 5 и при помощи силового гидроцилиндра 6 восстанавливается заданная высота режущего аппарата 1, после чего окна гидрозолотника закрываются, поскольку щуп возвращается в исходное положение. Предохранительное устройство 4 предотвращает поломки золотника при наезде полозкового щупа на препятствия. 3. САУ рабочими органами прореживателей сахарной свеклы предназначены для обработки (срезания) пропашных культур свеклоуборочными и другими комбайнами. Схема СУ секцией прореживателя типа ПСА на рисунке 6. Для обнаружения растений применяют электроконтактные и оптические (цветоконтрастные) датчики. При движении МСА вдоль рядков растений электроконтактный датчик 7, касаясь растения, замыкает через него электрическую цепь «источник питания — почва». Наличие силы тока определенного значения в цепи контактного электрода служит для электронных блоков системы ПСА сигналом обнаружения растения. Расстояние от датчика 7 обнаружения растения до поверхности почвы может варьировать от 20 до 90 мм. Оптический цветоконтрастный датчик формирует электрический сигнал при попадании растений свеклы в зону его обзора. Такой датчик обнаруживает растения свеклы как на фоне земли, так и на фоне распространенных сорняков. Датчик положения ножа состоит из индукционной катушки, закрепленной на корпусе исполнительного механизма (ножа), и ферромагнитного шунта 6, установленного на держателе ножа 3, который может совершать маятниковые движения.
Рисунок 6 - Функционально-технологическая схема СУ секцией прореживателя типа ПСА: 1 – опорное колесо; 2 – поворотный гидродвигатель; 3 – прореживающий нож; 4 – листьеотгибатель; 5 – инукционная катушка; 6 – ферромагнитный шунт; 7 – электроконтактный датчик обнаружения растений; 8 – рама прореживающей секции; 9 – изолятор; 10 – золотниковый гидрораспределитель; 11 – электромагнитный привод золотника; 12 – датчик ориентации
При выходе ножа из одного крайнего положения шунт проскакивает мимо индукционной катушки, в цепи которой формируется импульсный сигнал, свидетельствующий об изменении положения прореживающего ножа. Команды на привод последнего формируются в блоке управления (БУ) на основании совместной обработки сигналов от датчиков обнаружения растений и положения ножа. При поступлении команды из БУ электромагнитный привод золотника перемещает шток золотникового гидрораспределителя 10, вследствие чего поворотный гидродвигатель 2 воздействует на прореживающий нож 3. При этом вырезаются растения в рядке по ширине захвата ножа, который, перемещаясь, пропалывает пространство за обнаруженным растением. При обнаружении следующего растения процесс повторяется. При смещении прореживающих секций от оси рядка датчик 12 ориентации секций формирует сигнал на монитор, при этом загорается соответствующий светодиод. Если оператор своевременно не откорректирует положение МСА относительно рядков, то включается звуковой сигнал. Схема устройства САУ прореживателями сахарной свеклы – на рисунке 7. Электрические цепи датчиков обнаружения растений и положения ножей подключены к блоку входному (БВ) через электрические разъемы X6 и Х7, а электромагниты золотниковых гидрораспределителей (12 шт.) – к блоку управления исполнительными механизмами (БУ ИМ) через разъемы Х4 и Х5. Сигналы электроконтактных датчиков подаются в БВ на входы операционных усилителей, каждый из которых обеспечивает преобразование значения сопротивления электрической цели «щуп – земля» соответствующего датчика в напряжение. Оно сравнивается компараторами (элементами сравнения) с эталонными значениями напряжения, соответствующими верхнему и нижнему значениям сопротивления цепи «щуп – земля», при которых с высокой достоверностью идентифицируется касание щупом ростка свеклы. Микропроцессорный блок (МПБ) осуществляет обработку сигналов датчиков и выдачу результатов на монитор и БУ ИМ. Блок питания (БП) обеспечивает напряжениями соответствующих уровней все узлы устройства.
Рисунок 7- Схема устройства САУ прореживателями сахарной свеклы
4. Автоматическое управление положением фрезы используют при обработке приствольных полос в садах, для отвода фрезы от стволов деревьев (кустов).
Рисунок 8 - Схема устройства для управления положением фрез: 1, 7 – фрезы; 2 – гидроцилиндр; 3 – гидрозолотник; 4 и 5 – контакты; 6 – пружина; 8 – шуп; 9, 10 – выключатели
Отвод фрезы 1 (рисунок 8) осуществляет гидроцилиндр 2 при соприкосновении щупа 8 с деревом или кустом. Щуп поворачивается по ходу часовой стрелки и замыкает контакты 5. В результате этого срабатывает электромагнит УА1, открывая окна а и б гидрозолотника, через которые масло под давлением поступает в верхнюю полость гидроцилиндра 2. Шток поршня поворачивает фрезу 7 до тех пор, пока не разомкнётся конечный выключатель 10 и замкнется выключатель 9. При этом электромагнит УА1 отключается, окна а и б гидрозолотника 3 закрываются поршнями под действием пружин, фиксируя фрезу в отведенном состоянии. После обхода фрезой препятствия щуп 8 под действием пружины 6 возвращается в исходное состояние и замыкает контакты 4, что приводит к срабатыванию электромагнита УА2 и открыванию окон а и б золотника. При этом масло поступает через окно б в нижнюю полость силового гидроцилиндра 2, а фреза занимает рабочее положение, при котором размыкается конечный выключатель 9 и окна гидрозолотника перекрываются его поршнями.
5. Автоматическое управление положением остова зерноуборочного комбайна при работе на склонах позволяет сохранять параллельность хедера комбайна относительно поверхности почвы, а также горизонтальность положения его молотильного барабана и очистительных устройств. При работе комбайна без автоматики на поперечных склонах (с уклоном более 8°) технологическая масса скапливается на наклонной стороне комбайна, вследствие чего нарушается ТП обмолота зерна (увеличиваются до 30 % недомолот и повреждаемость зерна), а также нередки случаи забивания молотильных барабанов хлебной массой. Для выравнивания остова комбайна на склонах его корпус устанавливают на параллелограммной ходовой части 4 (рисунок 9), которую оборудуют гидросистемой управления.
Рисунок 9 - Схема устройства для выравнивания остова комбайна: 1 – корпус комбайна; 2 – демпфирующее устройство; 3 – маятник; 4 – ходовая часть; 5 – золотник
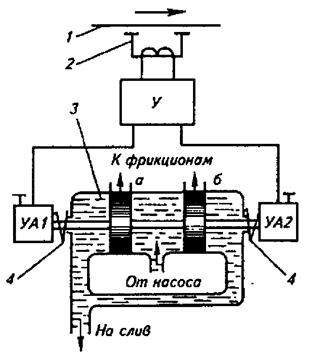
При наклоне корпуса 1 комбайна, например влево, его массивный маятник 3 также отклоняется влево и открывает окна а и б золотника 5. Масло от насоса под давлением поступает через окно а в верхнюю полость силового гидроцилиндра. При этом его поршень и шток, жестко связанный с параллелограммной ходовой частью 4 комбайна, поворачивает его остов до горизонтального положения, при котором поршни гидрозолотника под действием вертикального маятника перекрывают окна гидрозолотника и фиксируют положение силового гидроцилиндpa. Демпфирующие устройства 2 исключают ложные срабатывания САУ при кратковременных толчках и отклонениях остова комбайна от горизонтального положения. 2.1.4. САУ РЕЖИМАМИ РАБОТЫ МСА позволяют оптимизировать технологические, энергетические и эксплуатационные параметры функционирования МСА. В частности: 1. Автоматическое управление загрузкой рабочих органов уборочных комбайнов способствует повышению качества и эффективности ТП, уменьшению потерь технологического продукта и расхода топлива, а также улучшению условий труда операторов. Такое управление (рис. 10) осуществляют автоматическим регулированием скорости (в зависимости от загрузки рабочих органов машин) поступательного движения комбайнов (зерно-, свекло-, картофелеуборочных), посредством изменения передаточного отношения трансмиссии (гидрообъемной, вариаторной) 2, передающей вращающий момент от вала двигателя (гидравлического, дизельного) 1 комбайна на привод ведущих колес 3.
Рисунок 10 - Схема устройства для управления загрузкой комбайна: 1 – вал двигателя; 2 – трансмиссия; 3 – ведущие колеса; 4 – входной рабочий орган; 5 – контакты; 6 – гидрозолотник; 7 – силовой гидроцилиндр; УА1, УЛ2 – электромагниты
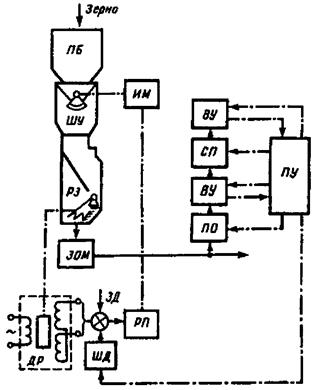
Например, при увеличении (относительно заданного) количества технологической массы (хлебной, корнеклубнеплодной), поступающей на входные рабочие органы 4 комбайна, полозковый датчик толщины слоя такой массы замыкает свои контакты 5 и включает электромагнит УА1, сердечник которого, перемещая вверх шток с поршнем гидрозолотника 6, открывает его окна для подачи в силовой гидроцилиндр и слива из него масла. При этом масло от насоса под давлением через верхнее окно поступает в верхнюю полость силового гидроцилиндра 7, поршень которого вместе со штоком передвигается вниз. В результате чего увеличивается передаточное отношение трансмиссии и комбайн снижает скорость движения, что вызывает уменьшение (до оптимальной) подачи технологической массы в уборочный комбайн. Соответствующее изменение положения щупа вызовет размыкание контактов 5 датчика толщины слоя, после чего поршни гидрозолотника 6 под действием пружин перекроют его окна. При уменьшении (относительно заданного) количества технологической массы, поступающей на входные рабочие органы комбайна, принцип работы СУ идентичен. При этом выключается электромагнит УА2, масло от насоса через нижнее окно гидрозолотника поступает в нижнюю полость гидроцилиндра 7, уменьшается передаточное отношение трансмиссии и комбайн увеличивает скорость движения, что вызывает увеличение (до оптимальной) подачи технологической массы в комбайн. 2. Автоматическое управление загрузкой и чистотой зерновой массы в потоке осуществляется путем предварительного и окончательного сепарирования на воздушно-решетной зерноочистительной машине (ЗОМ) (рисунок 11).
Рисунок 11 - Функциональная (а) и параметрическая (б) схемы ВР ЗОМ: ПБ – приемный бункер; ШУ – шиберное устройство; GBX и GВЫХ – масса зерна на входе и на выходе; ψ вх и ψ вых – чистота зерна на входе и на выходе; П – потери зерна
Зерновая масса из бункера с помощью питателя подается в воздушный канал первой аспирации (отсасывания воздуха), где легкие примеси воздушным потоком отделяются и выводятся из зоны машины. Затем зерновая масса поступает на решетный сепаратор, состоящий из четырех колеблющихся решет, которые расположены наклонно и попарно одно над другим. Верхние (сортировальные) решета просеивают зерна основной культуры, а крупные примеси скатываются и удаляются из ЗОМ. Нижние (подсевные) решета выделяют из потока мелкие примеси, также потом удаляемые из ЗОМ, а зерна основной культуры, скатываясь, проходят через воздушный канал второй аспирации, освобождаются от оставшихся мелких примесей и очищенные покидают машину. Выходные параметры ЗОМ характеризуются производительностью GВЫХ, чистотой ψ вых и содержанием потерь П полноценного зерна в отходах. При этом основными управляющими воздействиями, поступающими на ЗОМ как объект управления, будут изменение подачи GВХ зерна и скорости vВХ движения воздуха в аспирационных каналах. К числу возмущений, действующих на ЗОМ, следует отнести влажность wвх и чистоту входа ψ вх поступающей зерновой массы. Целевая функция системы оптимального управления воздушно-решетной ЗОМ соответствует максимуму GВЫХ (в зависимости от текущих значений GВЫХ, ψ вых, ψ вх, wвх, П и времени t при ограничении на допустимые уровни чистоты ψ вх и потерь П зерна. Контролировать потери зерна можно с помощью индикатора, выполненного в виде пьезоэлемента, наклеенного на изолированную специальную мембрану. При попадании зерен на мембрану пьезоэлемент вырабатывает электрические сигналы, амплитуда и длительность которых зависят от силы удара отдельных зерен. Индикатор имеет выходы на визуальный прибор, а также на световую и звуковую сигнализации. Загрузка воздушно-решетной ЗОМ вторичной очистки может быть стабилизирована работой САУ, исполнительный механизм (ИМ) которой воздействует на шиберное устройство (ШУ) промежуточного бункера (ПБ) зерна. Загрузку ЗОМ измеряют расходомером РЗ зерновой массы (рисунок 12), лоток которого перемещает плунжер дифференциального трансформаторного датчика расхода (ДР).
Рисунок 12 - Функциональная схема регулирования загрузки и чистоты продукта
Принцип действия САУ чистотой зерновой массы следующий. Обрабатываемое зерно поступает в ЗОМ из ПБ через ШУ и РЗ. САУ стабилизирует загрузку машины зерновой массой на уровне, установленном задатчиком (ЗД). Периодически, через определенные промежутки времени, программное устройство (ПУ) включает анализатор чистоты зерна, содержащий пробоотборник (ПО), весоизмерительное устройство (ВУ) и сепаратор (СП). ПО отбирает из зернового потока (на выходе из машины) пробу, после чего она поступает на ВУ. При достижении фактической массы пробы, равной заданной, включается в работу СП. При этом чистое зерно взвешивается ВУ и результат сравнивается с заданным значением, соответствующим кондиционному зерну. Если масса пробы ниже (выше) заданной, то загрузка машины соответственно увеличивается (уменьшается) путем коррекции ЗД требуемого уровня задания САУ ЗОМ. Описанный алгоритм коррекции оптимальной загрузки периодически повторяется по командам ПУ.
3. Автоматическое управление направлением движения МСА позволяет повысить эффективность и качество выполнения ТП, улучшить условия работы оператора. Устройства для автоматического направления движения (вождения) тракторов разрабатывают с момента их создания. В России в 1911 г. впервые О. Конджером и В. Корбеттой был предложен «автоматически действующий руль для пахотных тракторов». Работа МСА включает три основных этапа: выезд в поле и возвращение в хозяйство, движение по рабочей длине гона (поля), повороты в конце гона. Наибольшие затраты времени и объем выполняемых работ определяются нахождением МСА на поле (гоне), поэтому рассмотрим основные методы управления направлением МСА по рабочей длине гона. К таким методам можно отнести: копирование, программное вождение, дистанционное управление, естественное и искусственное ориентирование. Метод копирования может быть использован в большинстве видов полевых работ: вспашке, посеве, культивации, уборке. Действие системы автовождения по копиру показано на рисунке 13.
Рисунок 13 - Схема устройства для вождения МСА по копиру: 1 – гидрозолотник; 2 – поршень; 3 – контакты; 4 – копир; 5 – пружина; 6 – рычаг
Копир 4 при движении МСА скользит по дну борозды. Если копир отклоняется, например влево, то замыкается левый контакт 3 и срабатывает электромагнит УА1, питание на который подается от аккумуляторной батареи МСА. При этом рычаг 6 передвигает поршни 2 гидрозолотника 7 тоже влево и открываются его окна а и б. Масло под давлением, создаваемым гидравлическим насосом, поступает через окно а к левому силовому гидроцилиндру, шток которого воздействует на левую рулевую тягу. Вследствие этого трактор (комбайн) начинает поворачиваться влево до размыкания контактов 3, при этом электромагнит УА1 отключается и пружиной 5 поршни 2 гидрозолотника 1 возвращаются в исходное положение. При отклонении же копира вправо срабатывает электромагнит УА2, который открывает окна а и б гидрозолотника, и масло через окно б под давлением поступает на правый силовой гидроцилиндр, шток которого воздействует на правую рулевую тягу, и МСА поворачивается вправо до размыкания контактов 3, при этом электромагнит УА2 отключается и пружиной 5 поршни 2 гидрозолотника 1 возвращаются в исходное положение. При программном автовождении траектория движения задается специальным программным устройством, при этом необходимо иметь высокую точность соблюдения траектории движения, что предопределяет сложность создания соответствующих технических средств. На практике целесообразно использование программного вождения совместно принципом копирования (по длине гона управляют от копирующего устройства, а на поворотах — от программного). При дистанционном управлении оператор управляет одним или несколькими МСА по проводным или беспроводным (радиоканалу) линиям связи. Методы, использующие естественные и искусственные ориентиры, наиболее эффективны при строго заданных маршрутах движения. В качестве естественных ориентиров используют рядки растений, края хлебостоя, валки скощенной массы, борозды картофеля, шпалерную проволоку на виноградниках, магнитное поле Земли. Для искусственных ориентиров специально на полях прокладывают электрические провода, кабели, организуют лазерные лучи, делают метки из удобрений и т. п. На практике нашел применение метод вождения по электромагнитному полю, создаваемому проводами (искусственно проложенными под верхним слоем почвы), по которым пропускают высокочастотные токи (рисунок 14). Последние вокруг провода создают электромагнитное поле, воспринимаемое специальными датчиками, установленными на МСА. Провода закладывают на глубину до 0, 7 м вдоль гона, на концах которого прокладывают поперек отдельный провод, излучающий электромагнитное поле другой (относительно первой) частоты, который служит ориентиром для разворота МСА.
Рисунок 14 - Схема устройства для автоматического вождения трактора по проволоке: 1 – проволока; 2 – датчик; 3 – гидравлический золотник; 4 – пружины. Устройство поддерживает определенное расстояние датчика 2 от проволоки 1. При изменении этого расстояния сигнал отдатчика в зависимости от знака отклонения поступает через усилитель У на электромагниты УЛ1 или УЛ2 гидравлического золотника 3. Золотник управляет силовыми гидроцилиндрами рулевых тяг (фиксаторов) трактора (комбайна). 4. САУ направлением движения кормоуборочной машины обеспечивает ориентацию кормоуборочной машины в процессе ее движения на рабочем гоне таким образом, что выкапывающие рабочие органы располагаются вдоль рядков убираемых корней. Это является необходимым условием надежного извлечения корней из почвы. Без управления направлением движения машина будет по разным причинам отклоняться от линии рядков и нормальный уборочный процесс невозможен. Технологическая и конструктивная схемы СУ приведены на рисунке 15.
Рисунок 15 – Схемы СА вождения самоходной корнеуборочной машины: а — принципиальная; б — исполнительною механизма
Органом управления направлением движения машины являются передние управляемые колеса 6, положение которых, соответствующее прямолинейному движению машины, считается средним. По отношению к этому положению определяется реальный угол поворота управляемых колес δ, изменение положения которых осуществляется с помощью гидравлического исполнительного механизма 5. Отклонение машины от линии рядков корней определяется датчиком системы управления. Датчик системы автоматического вождения состоит из копирующего механизма, выполненного в виде двух (располагающихся в междурядьях) связанных между собой балансирной тягой 14 перьев-копиров 9. Размах каждого пера равен ширине междурядья. Шарниры 17 являются базой ориентации. Изменение их положения относительно центра междурядья приводит к повороту стрел-копиров 12 и соответствующему поперечному перемещению балансирной тяги 14, которое с помощью рычажного механизма 13, 15 преобразуется в пропорциональное смещение машины от линии рядков перемещением hд штанги 16. При искривлении линии рядков, например вправо (по ходу движения), перья копирующего механизма поворачиваются относительно базы ориентации против часовой стрелки (на рисунке 15 показано штриховыми линиями). Это вызывает поворот рычага 15 по часовой стрелке. При отсутствии воздействия на рулевое колесо 8 с усилителем 10 со стороны оператора штанга 11 неподвижна. Поэтому поворот рычага 15 ведет к повороту дифференциального рычага 13 относительно шарнира 01 и перемещению влево штанги 16. Рычажные механизмы 15, 13 выполняют функции передающего преобразователя датчика. Гидравлический исполнительный механизм системы управления состоит из золотникового гидрораспределителя 1 с блоком 7 гидрозамковых клапанов и гидроцилиндра 5 (рисунок 15, б). Выходным воздействием исполнительного механизма является перемещение гидроцилиндра hц или пропорциональный ему угол δ поворота управляемых колес. Гидрораспределитель 1 имеет подвижные относительно друг друга корпус 22 и золотник 21. Золотник соединен со штангой 16 датчика, и перемещение золотника вдоль корпуса распределителя при неподвижном гидроцилиндре равно перемещению штанги датчика. При смещении золотника 21 относительно среднего положения рабочих окон (например, под воздействием датчика) влево рабочие окна открываются справа и происходит соединение левого выходного канала гидрораспределителя с напорной магистралью, а правого канала – со сливной. Плунжер 19 гидрозамков под односторонним действием давления слева перемещается вправо, открывая первый шариковый клапан 20 и подключая тем самым штоковую полость Б гидроцилиндра 5 к соединенному со сливом правому выходному каналу гидрораспределителя. Одновременно под действием напора открывается левый шариковый клапан гидрозамка, соединяя бесштоковую полость А гидроцилиндра с левым его выходным каналом. При этом масло поступает из напорной магистрали в бесштоковую полость а гидроцилиндра, а из штоковой полости Б – на слив (в бак гидросистемы). Под действием перепада давлений гидроцилиндр со штоком 18 перемещается в сторону полости А, поворачивая рычаг рулевых трапеций 4 и соответственно управляемые колеса 6 по часовой стрелке. Популярное:
|
Последнее изменение этой страницы: 2016-05-30; Просмотров: 2371; Нарушение авторского права страницы