
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ПЛОСКАЯ СИСТЕМА СХОДЯЩИХСЯ СИЛ
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА Теоретическая механика – это наука, изучающая математические методы расчёта механизмов и сооружений. Расчет ведется не самих реальных объектов, а их моделей. Применяют графический и аналитический методы расчета. Графический метод – основан на геометрических построениях. Аналитический метод – основан на алгебраических расчетах. Статика – это раздел теоретической механики, который изучает равновесие абсолютно твердых тел под действием сил. Абсолютно твердое тело – это недеформируемое тело, в котором расстояние между любыми двумя точками всегда остается неизменным и никакие внешние воздействия не вызывают изменения его размеров и формы. Лекция №1 ОСНОВНЫЕ ПОНЯТИЯ И АКСИОМЫ СТАТИКИ Сила и система сил
Сила – это мера механического воздействия одного тела на другое. Сила измеряется в ньютонах(Н) и является векторной величиной, то есть характеризуется 1) численным значением ( модулем ); 2) точкой приложения; 3) направлением. В графическом методе расчета силу изображают в виде вектора, в каком либо масштабе. Пример1.1. Начертить вектор силы F = 30 кН в масштабе 1: 5.

Пример 1.2. Определить значение силы, если в масштабе 1: 2 вектор имеет длину 3 см.
Силы бывают внешними и внутренними. Внешние силы представляют собой действие одного тела на другое и делятся на активные и реактивные. Активные силы – стремятся вызвать перемещение тела (сила G, рис. 1.1). Реактивные силы (реакции) – стремятся противодействовать перемещению тела под действием активных сил (сила R, рис. 1.1).
Система сил - совокупность нескольких сил, приложенных к телу. Плоская система сил - линии действия сил лежат в одной плоскости. Пространственная система сил - линии действия сил лежат в разных плоскостях.
Эквивалентные системы сил – разные системы сил, которые оказывают одинаковое механическое действие на тело. Равнодействующая сила - одна сила, эквивалентная данной системе сил. Уравновешивающая сила - сила, равная по модулю данной силе и направленная по той же линии действия, но в противоположную сторону. Уравновешенная система сил - система сил, приложенная к материальной точке под воздействием которой точка находится в состоянии покоя.
Få 2= F12 + F22 + 2 F1 × F2cosj Связи и их реакции Связи - это тела, которые ограничивают движение рассматриваемого тела. Реакции связей - силы, действующие на тело со стороны связей, которые противодействуют возможным движениям тела. Реакция связи всегда противоположна направлению, по которому возможно движение тела. Принцип освобождения от связей - не изменяя равновесия тела, каждую связь можно отбросить, заменив ее реакцией. Наиболее распространенные виды связей:
1) Связь в виде гладкой плоскости(рис. 1.3, а). Реакция связи (R) направлена перпендикулярно к опорной поверхности. 2) Гибкая связь, осуществляемая веревкой, тросом, цепью и т. п. (рис. 1.3, б). Реакции гибких связей RA и RB направлены вдоль связей. 3 ) Связь в виде жесткого прямого стержня с шарнирным закреплением концов(рис 1.3, в). Здесь реакции R1 , R2 и R3 направлены вдоль осей стержней. 4) Связь, осуществляемая точечной опорой (рис. 1.3 г). Реакция связей R1, R2 R3, направлены перпендикулярно поверхности опирающегося тела.
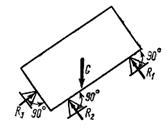 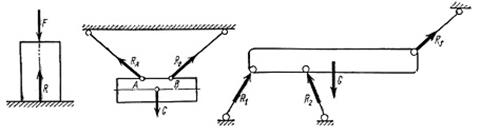
Рис. 1.3 Виды связей Лекция № 2 ПЛОСКАЯ СИСТЕМА СХОДЯЩИХСЯ СИЛ Геометрический метод сложения сил, приложенных в одной точке
Линии действия сходящихся сил пересекаются в одной точке (рис. 2.1, а). Сходящиеся силы можно перенести в точку пересечения их линий действия (точка К, рис. 2.1, б).
Få = F1+F2+F3 +F4. Рис. 2.1 Рис. 2.2
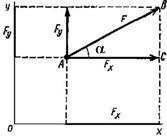
Для сложения векторов надо построить силовой многоугольник: в конец первого вектора помещаем начало второго, в конец второго – начало третьего и т. д. Для построения равнодействующей силы соединяем начало первого вектора с концом последнего. Геометрическое условие равновесия сходящихся сил – система сходящихся сил находится в равновесии, если Få = 0, т.е. при построении силового многоугольника конец последней слагаемой силы совместится с началом первой (рис. 2.2). Проекция сил на ось Fx - проекция вектора F на ось x - это отрезок, отсекаемый перпендикулярами, опущенными на ось х из начала и конца вектора F (рис. 2.3). Fу - проекция вектора F на ось у - это отрезок, отсекаемый перпендикулярами, опущенными на ось у из начала и конца вектора F (рис. 2.4).
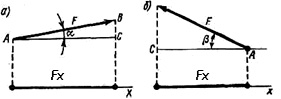
Fx = F cos a Fx = -F cos b Рис. 2.3 Рис. 2.4
Значение проекции силы определяется из прямоугольного треугольника по правилу:
Рис. 2.5
Σ Fiy = 0
Этапы решения 1) Чертим расчетную схему (рис. 2.6, б). Для этого находим точку, где пересекаются линии действия всех сил. Это узел В. Прикладываем к нему на расчетной схеме внешние силы G1 и G2 (рис. 2.7, б). 2) Освобождаем выделенную точку от связей, а их действие заменяем реакциями. Связи в точке В осуществляются стержнями АВ и ВС. Прикладываем вместо них на расчетной схеме реакции стержней R1 и R2. 3) Выбираем координатные оси х и у (рис.2.6, б). Направление координатных осей х и у следует выбирать так, чтобы хотя бы одна из осей была перпендикулярна неизвестным силам (реакциям).
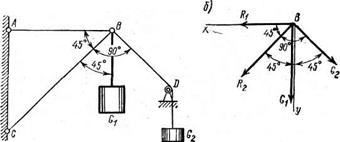
а) Схема нагружения б) Расчетная схема
Рис. 2.6 4) Составляем уравнения равновесия: SFix = 0; R1 – G2 Cos45o + R2 Cos45o=0 SFiу = 0; G1 + R2 Cos45o + G2 Cos45o=0 5) Решаем уравнения: R2 = - G2 - R1 = G2 Cos45o - R2 Cos45o= 400 × 0, 707 – (-1249)× 0, 707 = 1166 Н.
Знак минус перед значением реакции R2 показывает, что она направлена в противоположную сторону от выбранного направления. Лекция № 3 ПАРА СИЛ И МОМЕНТЫ СИЛ Пара сил
Пара сил – это две равные и параллельные силы, направленные в противоположные стороны и не лежащие на одной прямой. Пара сил, действующая на тело, стремится вращать это тело (рис. 3.1).
Рис. 3.1 Рис. 3.2 Плечо пары ( а) - кратчайшее расстояние между линиями действия сил (плечо всегда перпендикулярно силам). Момент пары сил (М) - равен произведению одной из сил на ее плечо: М = Fa = F'a, Н× м (3.1)
Момент пары сил положительный , если пара стремится повернуть тело по часовой стрелке (рис. 3.1, а), и отрицательным, если пара стремится вращать тело против часовой стрелки (рис. 3.1, б). Рис. 3.3 Рис. 3.4
Центр момента - точка О, относительно которой возникает момент.
Момент положительный, если сила стремится вращать тело по часовой стрелке (рис. 3.4, а), и отрицательный — против часовой стрелки (рис. 3.4, б).
Когда линия действия силы проходит через данную точку, момент силы относительно этой точки равен нулю, так как плечо а = 0 (рис. 3.4, в).
Лекция № 4 ОПРЕДЕЛЕНИЕ ОПОРНЫХ РЕАКЦИЙ Рис. 4.1 Двухопорные балки имеют две опоры – одна опора шарнирно-неподвижная, вторая – шарнирно-подвижная. Шарнирно-подвижная опора необходима для компенсации перемещений балки при температурных расширениях балки из-за колебаний температуры, а также при возможной подвижке опоры, например, при осадке почвы. Виды балок Консоль – выступающая за опору не закрепленная часть балки (рис. 4.2, б, в). 1) Бесконсольные балки 2) Одноконсольные балки 3) Двухконсольные балки
а) б) в) Рис. 4.2 Виды нагрузок
1) Сосредоточенная сила (рис.4.3, а) – F - сила, приложенная в одной точке.
а) б) в) Рис. 4.3 2) Равномерно распределенная нагрузка (рис.4.3, б) – нагрузка, равномерно распределенная на некоторой длине l . Характеризуется интенсивностью q, единица измерения - Н/м или кН/м. При решении задач равномерно распределенная нагрузка интенсивностью q заменяется одной силой Fq = q× l , которая является равнодействующей силой и прикладывается посередине длины l .
3) Пара сил или момент (рис. 4.3, в) – М, Н× м.
Решение. 1) Чертим расчетную схему (рис. 4.5). На расчетной схеме заменяем распределенную нагрузку q ее равнодействующей Fq = q× b, которая прикладывается посредине нагруженного участка b. Освобождаем балку от опор, а их действие заменяем реакциями - RAу, RAx и Rb. Проставляем расстояния между всеми силами и моментами – a, c, d, а также общую длину балки – l.

Рис. 4.4 Расчетная схема
4) Проверяем найденные значения реакций :
SFiv = 0; RAy - qb +RB - F = 4, 63 – 1, 5× 6 + 8, 37 - 4 = 0. Реакции найдены верно.
Лекция № 5 ЦЕНТР ТЯЖЕСТИ Рис. 5.1 Рис. 5.2 Рис. 5.3 Координаты центра тяжести плоских геометрических фигур определяют по формуле (5.1): хс = где хс, ус – координаты центра тяжести всей фигуры; хi, уi - координаты центра тяжести отдельных составных частей, из которых состоит фигура; Аi – площадь отдельных составных частей фигуры; А – площадь всей фигуры. Пример 5.1 . Определить координаты центра тяжести плоской фигуры с круглым отверстием, изображенной на рис. 5.3. Решение. Разбиваем фигуру на три части: два прямоугольника I и II и круглое отверстие III. Вычисляем координаты центров тяжести и площади этих частей: х1 = 350 мм; у1 = 300 мм; А1 = 600× 700 = 4200× 102 мм2; х2 = 500 мм; у2 = 850 мм; А2 = 400× 500 = 2000× 102 мм2; х3 = 350 мм; у3= 380 мм; А3 = -
Вычисляем координаты центра тяжести всей фигуры: xc = ус = ТЕОРЕТИЧЕСКАЯ МЕХАНИКА Теоретическая механика – это наука, изучающая математические методы расчёта механизмов и сооружений. Расчет ведется не самих реальных объектов, а их моделей. Применяют графический и аналитический методы расчета. Графический метод – основан на геометрических построениях. Аналитический метод – основан на алгебраических расчетах. Статика – это раздел теоретической механики, который изучает равновесие абсолютно твердых тел под действием сил. Абсолютно твердое тело – это недеформируемое тело, в котором расстояние между любыми двумя точками всегда остается неизменным и никакие внешние воздействия не вызывают изменения его размеров и формы. Лекция №1 ОСНОВНЫЕ ПОНЯТИЯ И АКСИОМЫ СТАТИКИ Сила и система сил
Сила – это мера механического воздействия одного тела на другое. Сила измеряется в ньютонах(Н) и является векторной величиной, то есть характеризуется 1) численным значением ( модулем ); 2) точкой приложения; 3) направлением. В графическом методе расчета силу изображают в виде вектора, в каком либо масштабе. Пример1.1. Начертить вектор силы F = 30 кН в масштабе 1: 5.
Пример 1.2. Определить значение силы, если в масштабе 1: 2 вектор имеет длину 3 см.
Силы бывают внешними и внутренними. Внешние силы представляют собой действие одного тела на другое и делятся на активные и реактивные. Активные силы – стремятся вызвать перемещение тела (сила G, рис. 1.1). Реактивные силы (реакции) – стремятся противодействовать перемещению тела под действием активных сил (сила R, рис. 1.1).
Система сил - совокупность нескольких сил, приложенных к телу. Плоская система сил - линии действия сил лежат в одной плоскости. Пространственная система сил - линии действия сил лежат в разных плоскостях.
Эквивалентные системы сил – разные системы сил, которые оказывают одинаковое механическое действие на тело. Равнодействующая сила - одна сила, эквивалентная данной системе сил. Уравновешивающая сила - сила, равная по модулю данной силе и направленная по той же линии действия, но в противоположную сторону. Уравновешенная система сил - система сил, приложенная к материальной точке под воздействием которой точка находится в состоянии покоя.
Få 2= F12 + F22 + 2 F1 × F2cosj Связи и их реакции Связи - это тела, которые ограничивают движение рассматриваемого тела. Реакции связей - силы, действующие на тело со стороны связей, которые противодействуют возможным движениям тела. Реакция связи всегда противоположна направлению, по которому возможно движение тела. Принцип освобождения от связей - не изменяя равновесия тела, каждую связь можно отбросить, заменив ее реакцией. Наиболее распространенные виды связей:
1) Связь в виде гладкой плоскости(рис. 1.3, а). Реакция связи (R) направлена перпендикулярно к опорной поверхности. 2) Гибкая связь, осуществляемая веревкой, тросом, цепью и т. п. (рис. 1.3, б). Реакции гибких связей RA и RB направлены вдоль связей. 3 ) Связь в виде жесткого прямого стержня с шарнирным закреплением концов(рис 1.3, в). Здесь реакции R1 , R2 и R3 направлены вдоль осей стержней. 4) Связь, осуществляемая точечной опорой (рис. 1.3 г). Реакция связей R1, R2 R3, направлены перпендикулярно поверхности опирающегося тела.
Рис. 1.3 Виды связей Лекция № 2 ПЛОСКАЯ СИСТЕМА СХОДЯЩИХСЯ СИЛ
Популярное:
|
Последнее изменение этой страницы: 2016-08-31; Просмотров: 1292; Нарушение авторского права страницы
 Решение. Составляем пропорцию:
Решение. Составляем пропорцию:  Решение: составляем пропорцию:
Решение: составляем пропорцию:  Внутренние силы - возникают внутри тела под действием внешних сил.
Внутренние силы - возникают внутри тела под действием внешних сил. Правило параллелограмма - равнодействующая (FΣ ) двух сил (F1 и F2), приложенных к одной точке, является диагональю параллелограмма, построенного на данных силах/Вместо правила параллелограмма можно пользоваться правилом треугольника.
Правило параллелограмма - равнодействующая (FΣ ) двух сил (F1 и F2), приложенных к одной точке, является диагональю параллелограмма, построенного на данных силах/Вместо правила параллелограмма можно пользоваться правилом треугольника.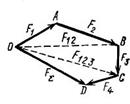






 Алгебраическое условие равновесия плоской системы сходящихся сил - система сходящихся сил находится в равновесии, когда алгебраические суммы проекций сил на каждую из двух координатных осей равны нулю:
Алгебраическое условие равновесия плоской системы сходящихся сил - система сходящихся сил находится в равновесии, когда алгебраические суммы проекций сил на каждую из двух координатных осей равны нулю:  Σ Fix = 0
Σ Fix = 0  = - 400 -
= - 400 -  = - 1249 Н.
= - 1249 Н.







 =
= 8, 37 кН
RАy =
=
= 8, 37 кН
RАy =  =4, 62кН
=4, 62кН
 ; ус =
; ус =  , (5.1)
, (5.1)  -
-  = - 804× 102 мм2 (минус означает, что А3 – отверстие).
= - 804× 102 мм2 (минус означает, что А3 – отверстие). = 407 мм
= 407 мм = 492 мм
= 492 мм