
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Кривошипно-ползунный механизм, его структура, схема, анализ
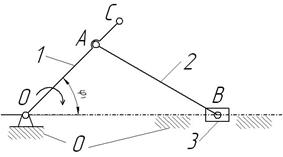
Структурный анализ механизма Представлен кривошипно-ползунный механизм. Число степеней исследуемого механизма определим по формуле Чебышева: где n – число подвижных звеньев в составе исследуемой кинематической цепи; p4 и p5 – соответственно число пар четвертого и пятого класса. Для определения величины коэффициента n проанализируем структурную схему механизма (рисунок 1):
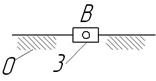
Рисунок 1 – Структурная схема механизма Структурная схема механизма состоит из четырех звеньев: 1 – кривошип 2 – шатун АВ 3 – ползун В 0 – стойка при этом звенья 1 – 3 являются подвижными звеньями а стойка 0 – неподвижным звеном. Она представлена в составе структурной схемы двумя шарнирно-неподвижными опорами и направляющей ползуна 3. Следовательно n=3. Для определения значений коэффициентов p4 и p5 найдем все кинематические пары входящие в состав рассматриваемой кинематической цепи. Результаты исследования заносим в таблицу 1. Таблица 1 – Кинематические пары
Из анализа данных таблицы 1 следует что исследуемый механизм ДВС с увеличенным ходом поршня состоит из семи пар пятого класса и образует замкнутую кинематическую цепь. Следовательно p5 =4 а p4 =0. Подставив найденные значения коэффициентов n p5 и p4 в выражение (1) получим:
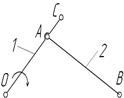
Для выявления структурного состава механизма разбиваем рассматриваемую схему на структурные группы Ассура. Первая группа звеньев 0-3-2 (рисунок 2).
Рисунок 2 – Структурная группа Ассура Данная группа состоит из двух подвижных звеньев: шатун 2 и ползун 3; двух поводков: кривошип 1 и направляющая (стойка) 0; и трех кинематических пар: 1-2 – вращательная пара пятого класса; 2-3 – вращательная пара пятого класса; 3-0 – поступательная пара пятого класса; тогда n=2; p5 =3 a p4 =0. Подставив выявленные значения коэффициентов в выражение (1) получим:
Следовательно группа звеньев 4-5 является структурной группой Ассура 2 класса 2 порядка 2 вида. Вторая группа звеньев 0-1 (рисунок 3).
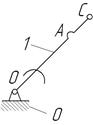
Рисунок 3 – Первичный механизм Данная группа звеньев состоит из подвижного звена – кривошипа 1 стойки 0 и одной кинематической пары: 0 – 1 – вращательная пара пятого класса; тогда n=1; p5 =1 a p4 =0. Подставив найденные значения в выражение (1) получим:
Следовательно группа звеньев 1 – 2 действительно является первичным механизмом с подвижностью 1. Структурная формула механизма МЕХАНИЗМ=ПМ(W=1) + СГА(2 класс 2 порядок 2 вид) Синтез кинематической схемы Для синтеза кинематической схемы сперва необходимо установить масштабный коэффициент длин μ ℓ . Для нахождения μ ℓ необходимо взять натуральный размер кривошипа OС и разделить его на размер отрезка произвольной длины │ OС│:
После этого с помощью масштабного коэффициента длин переводим все натуральные размеры звеньев в отрезки с помощью которых мы будем строить кинематическую схему:
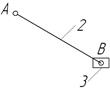
После вычисления размеров приступаем к построению одного положения механизма (рисунок 4) с помощью метода засечек. Для этого сперва вычерчиваем стойку 0 на которой закреплен кривошип. Затем проводим через центр окружности которая была начерчена для построения стойки горизонтальную прямую ХХ. Она необходима для последующего нахождения центра ползуна 3. Далее из центра этой же окружности проводим две другие радиусом Точка пересечения этой окружности с прямой ХХ будет являться точкой В. Вычерчиваем направляющую для ползуна которая будет совпадать с прямой ХХ. Строим ползун и все остальные необходимы детали чертежа. Обозначаем все точки. Синтез кинематической схемы завершен. Популярное:
|
Последнее изменение этой страницы: 2017-03-03; Просмотров: 696; Нарушение авторского права страницы
 (1)
(1) 
 (1)
(1) 





 и
и  . Затем от туда же строим чертим отрезок длиной
. Затем от туда же строим чертим отрезок длиной  к горизонтальной прямой ХХ. Точки пересечения этого отрезка с построенными окружностями будут точками А и С соответственно. Затем из точки А строим окружность радиусом
к горизонтальной прямой ХХ. Точки пересечения этого отрезка с построенными окружностями будут точками А и С соответственно. Затем из точки А строим окружность радиусом  .
.