
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Принципы сигнализации в цифровых АТССтр 1 из 7Следующая ⇒
ВВЕДЕНИЕ Идея использовать световые сигналы для передачи информации стара как мир. Преимущества этого способа были очевидны даже нашим предкам. Например, отражающие солнечный свет сигнальные зеркала в Древней Греции, сигнальные костры на сторожевых вышках древней Руси в период татаро-монгольского нашествия использовались для предупреждения. Актуальность данного проекта заключается в первую очередь в удовлетворении повышенного спроса на услуги связи, расширение и укрепление позиций оператора на рынке, предоставление расширенного спектра услуг. В результате реализации данного проекта организация получит дополнительные доходы от аренды каналов, а также доходы от предоставления услуг ММТР, передачи данных и т.д. В 1966 году англичане Као и Хокэм предсказали возможность волоконно-оптической связи. Уже в 1972 году в окрестностях Бирмингема была проложена волоконно-оптическая линия связи (ВОЛС) длиной несколько десятков километров; в 1976 году на восточном побережье США начала функционировать ВОЛС длиной 1000 км; в 1984 году была построена ВОЛС под Ламаншем; в 1988 году была введена первая трансатлантическая подводная ВОЛС. Теперь мы уже не в состоянии обойтись без оптической связи. C начала 90-х годов Взаимоувязанная сеть связи нашей Республики вступила в фазу существенных качественных изменений, обусловленных широким внедрением цифровой техники передачи и коммутации. Новые возможности цифровых коммутаторов и технических средств транспортной среды предъявляют новые требования к направляющим системам электросвязи. Стремительными темпами идет замена кабелей c металлическими жилами на волоконно-оптические кабели на всех участках сетей, происходит переход от многомодовых к одномодовым оптическим волокнам, увеличивается длина участков регенерации и скорость передачи, используется спектральное уплотнение. Одной из сложных задач в переходный период является обеспечение совместной работы аналогового и цифрового оборудования, а также постепенный переход на бoлее совершенные направляющие системы. В настоящем дипломном проекте рассматривается реконструкция МСС на участке Жалагаш (райцентр)- на базе современной направляющей системы –ВОЛС. Уникальность ВОЛС заключается в том, что они широкополосны, имеет малые затухания, невосприимчивость к внешним электромагнитным полям, решает проблему электромагнитной совместимости, скрытность связи, имеют малые габаритные. В заключение перечисления положительных качеств ВОЛС необходимо подчеркнуть, что волоконные световоды изготавливаются из диэлектрических материалов – кварца, многокомпонентных стекол, полимеров. На их изготовление не расходуются дефицитные цветные металлы. В современных условиях, когда уже сказывается ограниченность мировых запасов меди и свинца, переход на недефицитное сырье кабельной связи является весьма актуальной. В заключение можно сделать вывод, что ключевым элементом в конкурентной борьбе на рынке доступа в Казахстане станет использование новых технологий, позволяющих оперативно разворачивать сети доступа, транспортной сети снижать их стоимость и улучшать качество предоставляемых услуг, Реконструкция межстанционных линий СТС Жалагашского района Кызылординской области на базе современной технологии с применением оптического кабеля принесет плоды уже в скором будущем. С внедрением данного проекта в реальную жизнь улучшиться качество связи, уширяется ассортимент предоставляемых услуг и т. д. Цель дипломного проекта: - выполнить анализ существующей СТС Кызылординской области Жалагашский района и перспективы развития сети; - описать оборудование DRX-4; - привести характеристику оборудования передачи. Задача дипломного проекта: - вычислить нагрузку и количество ИКМ; - выполнить расчет оборудования DRX—4; - расчет приведенных затрат; - определить капитальные затраты; - расчет эксплуатационных расходов; - выяснить доходы.
ОСНОВНАЯ ЧАСТЬ 1.1 Анализ существующей сети СТС Жалагашского района
Сельские телефонные сети (СТС) предназначены для обеспечения телефонной связью населения райцентра и населенных пунктов принадлежащих данному району. На сельских телефонных сетях применяются, как правило, автоматические телефонные станции малой емкости (до 200 номеров) и значительно реже станции средней емкости (до 2000 номеров). Выбор станции той или иной емкости зависит от типа населенных пунктов, преобладающих в данной сельской местности, а также от структуры, преимущественно станции емкостью 100/2000 в основном используются для телефонной связи в районном центре. Сельские телефонные сети различают по двум способам построения: - радиальный — одноступенчатая схема построения сети; - радиально-узловой — двухступенчатая схема построения сети. По назначению и месту расположения телефонные станции (СТС) делятся на следующие виды: центральная станция (ЦС), узловая станция (УС) и оконечная станция (ОС). Центральная станция располагается в райцентре и одновременно является телефонной станцией самого районного центра, в ЦС включаются оконечные станции непосредственно — при одноступенчатой схеме построения сети, либо через узловую станцию — при двухступенчатой схеме построения сети. Также в сельских районах с большими площадями и вытянутой конфигурации редко, но все же применяется трехступенчатое построение сети: ОС включается в ЦС через две транзитные станции — узловую станцию (УС) и промежуточную станцию (ПС). Однако трехступенчатые направления связи на СТС не предусматриваются, так как на таких направлениях увеличивается суммарное станционное затухание, удлиняется время установления соединения и при применении аппаратуры уплотнения увеличивается затухание и это приводит к неэкономическому использованию комплектов аппаратуры. В основном на сети СТС используется двухступенчатое построение (ЦС—УС—ОС). В настоящее Жалагашском районе с центром в селе Жалагаш проживает по данным райстатуправления 41150 человек, непосредственно в самом райцентре численность составляет 7350 человек, и для обеспечения связи между абонентами и выхода их на АМТС используется станция типа АТСК-100/2000 которая была установлена в 1980 году. Также на сети района в качестве оконечных станций используются станции типа АТСК-50/200 (50/200М) непосредственно установленные в селах принадлежащих данному району. В районе на 2002 год имеются действующие станции с приведенной емкостью, технические характеристики которых описаны в таблице 1.1. На сети имеется 9 ОС и 1 ЦС (рисунок 1.1). Из всего вышесказанного следует, что, район является экономически перспективным, и следовательно, для более полного удовлетворения потребности населения в услугах связи, потребуется замена физически и морально устаревших АТС на более совершенное цифровое коммутационное оборудование.

Структурная схема райиона
Рисунок 1.1 Таблица 1.1
Характеристики АТС
Структурная схема
Структура программного обеспечения DRX-4 многофункциональная и многозадачная, обеспечивающая параллельное выполнение многих заданий. Режим реального времени обеспечивает активизацию и постановку в очередь процессов в соответствии с механизмом приоритетов. Процессы используют объектно-ориентированные структуры, поэтому любое сообщение между процессами обеспечивается точно определенным методом передачи данных. Задачи реального времени и данные обрабатываются 16-битовыми процессорами высокой степени интеграции.
Структурная схема DRX-4
Рисунок 1.5 Данные тарификации, системной памяти, нагрузки, регистрируемых сообщений и статистики выводятся через отдельный блок системы, который обеспечивает связь «человек-машина» в соответствии с рекомендациями МСЭ-Т Z.300 с помощью терминала MAP типа VT220. К системе могут подключаться телефонные аппараты с частотным и импульсным типами набора, а также компьютеры посредством модемов [3]. Основные технические характеристики системы представлены в таблице 1.1. Таблица 1.1
ТЕХНИЧЕСКАЯ ЧАСТЬ Характеристика СТС
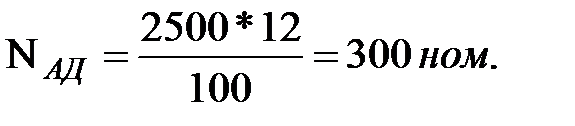
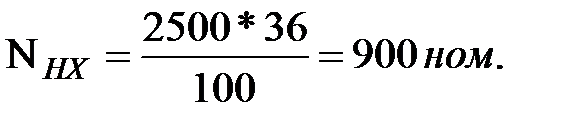
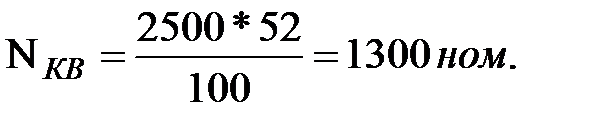
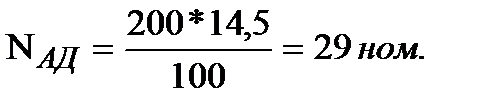
Определение структурного состава абонентов ЦС ОС. Для определения структурного состава абонентов ЦС воспользуемся таблицей 4 [5], а для абонентов ОС — таблицей 5 [5]. Для ЦС:
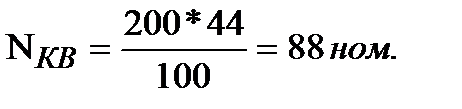
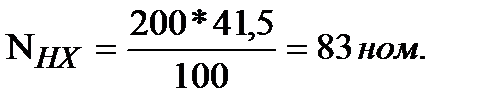
Для ОС-6, 9: 200 номеров
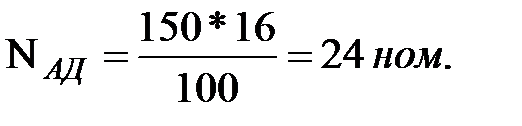
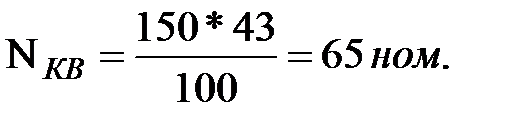
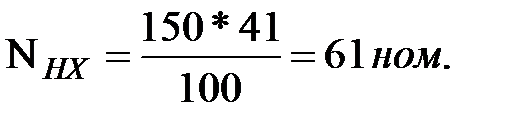
Для ОС-1, 5, 8: 150 номеров
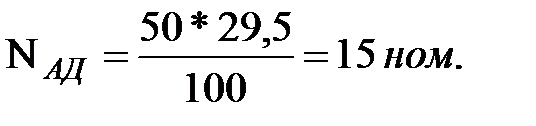
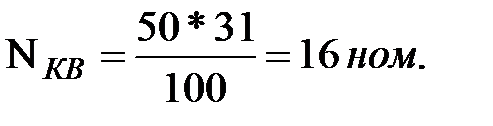
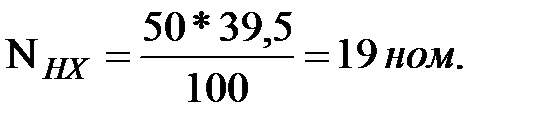
Для ОС-2, 3, 7: 50 номеров
Для ОС-4: 100 номеров
Определение нагрузки от АТC. Определим нагрузку исходящую от каждой ОС сети.
Для ОС-6, 9:
Для ОС-1, 5, 8:
Для ОС-2, 3, 7:
Для ОС-4:
Определим нагрузки на пучок ЗСЛ к АМТС от абонентов каждой ОС
Для ОС-6, 9:
Для ОС-1, 5, 8:
Для ОС-2, 3, 7:
Для ОС-4:
Определим нагрузки, входящие к абонентам ОС и УС:
Для ОС-6, 9:
Для ОС-1, 5, 8:
Для ОС-2, 3, 7:
Для ОС-4:
Определяется нагрузка к абонентам ОС и УС, поступающие по пучку СЛМ от АМТС
Для ОС-6, 9:
Для ОС-1, 5, 8:
Для ОС-2, 3, 7:
Для ОС-4:
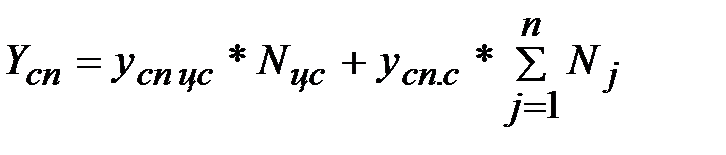
Определяется внутристанционную нагрузку ЦС
Определяется нагрузка, исходящую от абонентов ЦС на все остальные АТС сети
Определяется нагрузка, входящую на ЦС от всех остальных АТС сети:
Определяется нагрузка к спецслужбам:
Определяется суммарная нагрузка на пучок ЗСЛ к АМТС от абонентов всех станций, имеющих выход на АМТС
Определяется общая входящая междугороднюю нагрузку ко всем АТС сети:
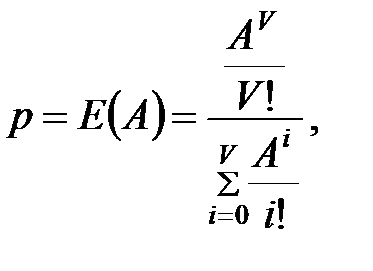
Расчет объема оборудования Расчет линейного оборудования. Для расчета объема линейного оборудования проектируемой сети необходимо знать величины потоков нагрузки, структуру пучков линий, качество обслуживания вызовов (потери) во всех направлениях и группообразование блоков и ступеней искания станций сети. Общая норма потерь от абонента до абонента задается технологическими нормами и для сельских телефонных сетей не должна превышать 3%. При этом на участке между двумя АТС величина потерь составляет 0, 5%, входящие от и исходящие линии к АМТС и УСС должны обеспечивать потери не более 0, 1% [6]. Для расчета числа соединительных линий, исходящих со станций электронных систем используется первая формула Эрланга так как исходящие пучки линий этих станций являются полнодоступными [7]:
где, А — поступающая нагрузка Эрл; V — число линий, обслуживающих нагрузку А. Однако из первой формулы Эрланга невозможно получить зависимость числа линий от обслуженной нагрузки и вероятности потерь, поэтому для вычисления числа линий используются приближенные методы, например метод половинного деления, который будет рассмотрен позднее. Число каналов от координатных АТС может быть рассчитано по методу эффективной доступности, так как коммутационные блоки координатных АТС являются неполнодоступными. Для расчета необходимо знать параметры блоков ступени ГИ, в поле которых включаются исходящие линии, и среднюю нагрузку на один вход [6]. На оконечных координатных АТС ступень ГИ комплектуется трехпроводными блоками 80´ 120´ 400, а на узловых — шестипроводными блоками 60´ 80´ 400. Параметры этих блоков имеют значения (в скобках даны значения шестипроводных блоков): nA — число входов в один коммутатор звена А = Для расчета необходимого числа каналов для обслуживания исходящей нагрузки от АТС координатных систем к другим АТС следует решить следующую систему уравнений:
где, q — эмпирический коэффициент, примем его равным 0, 75. Dэ и норму потерь P, число каналов в направлении определяется по формуле О’Делла:
где, коэффициенты a и b определяются по таблицам для величин Dэ и P [1]. Исходя из формулы
Находятся количество ИКМ линий. Количество исходящих линий от ОС сети на ЦС для ОС - 6, 9. В результате получилось, что от ОС-6 к ЦС необходимо 1 икм линия для передачи исходящей от ОС6 нагрузки, результаты расчетов от остальных ОС на ЦС сведены в таблицу 2.2.
Таблица 2.2
Результаты расчетов
Остальные расчеты физических линий необходимо произвести по первой формуле Эрланга с помощью таблиц [6], результаты расчетов и вероятности потерь приведены в таблице 2.3.
Таблица 2.3
Расчеты физических линий
Характеристика DМХ
Блок преобразователя напряжения генератора звонка и импульсов оплаты. Необходимое для функционирования блока преобразователя напряжения генератора звонка и импульсов оплаты напряжение минус 48 V постоянного тока вырабатывается устройством SOP-II. В данном блоке расположены три основные цепи, функции и особенности которых приведены ниже: Цепь преобразователя напряжения. Вырабатывает постоянные напряжения ±12 V и ±5 V, которые необходимые для платы контроля и периферийных плат. Максимальная выходная мощность цепи преобразователя питания 130 W, а общая отдача больше чем 85 %. В пределах - 43 V и -59 V работает без перерывов. Генератор звонка. Генератор звонка вырабатывает необходимый в системе вызывной звонок. Генератор звонка работает при наличии следующих входных параметров: Генератор импульсов оплаты вырабатывает импульсы оплаты необходимые для оплачивания таксофонных вызовов. Выходные характеристики генератора импульсов оплаты одинаковые с характеристикам генератора звонка. Генератор импульсов оплаты работает при наличии следующих входных параметров: Блок преобразователя напряжения генератора звонка и импульсов оплаты ставиться всегда на 25 позиций каждой полки. Блок защищен от высоких входных и выходных напряжениях. Блок преобразователя напряжения генератора звонка и импульсов платы первой и второй полки связаны параллельно между собой. Тоже параллельно связаны и блоки третьей и четвертой полки. Если один из взаимосвязанных блоков неисправный, то исправный блок преобразователя напряжения генератора звонка и импульсов оплаты обслуживает обе полки без перерыва работы системы. Так в системе обеспечивается дублированный (резервный) блок преобразователя напряжения генератора звонка и импульсов оплаты. При подаче напряжения блок зажигает самый первый зеленый светодиод - 48 V. Под этим светодиодом есть еще три красных светодиодов. При неисправности предохранителя минус 48 В горит светодиод " минус 48 В FAIL", при неисправности цепи генератора питания загорается светодиод" OUTPUT FAIL", а при аварии генератора звонка и пульсов оплаты светодиод" RING FAIL ". Общие аварийные выходы преобразователя питания и генератора звонка и пульсов оплаты связаны с платой МХС. Блок сохранения данных FSM/DDS. FSM/DDS для сохранения тарификационных и log данных. Кроме того используется для сохранении в запасе системных и абонентских данных платы МХС и DTC и для обратной перезагрузки этих данных при необходимости. Для записи данных используются два диска с 40 Мбайт емкости. Кроме того на блоке есть 3, 5 " floppy" драйвер с емкостью 1, 44 Мбайт, которой используется для обмена информации. В блок FSM можно включить максимум четыре платы GNS и связь с внешним миром будет осуществляться через восьмые порты RS-232. Необходимое для работы питание блок получает с платы РОС первой полки штатива. Плата распределения данных DDC. В каждом стативе есть одна плата DDC. Плата DDC служит для цифровой связи между модулями своего статива или между этими модулями и модулями остальных стативов. Плата DDC монтируется всегда на заданной панели первой полки статива и не содержит никакие электронные цепи. Терминал контроля и управления ОМАР. Программирование и контроль системы осуществляется с помощи терминала контроля и управления ОМАР (Operational Maintenance and Administration Position). Этот терминал используется для доступа к системе, для ввода новых данных, для чтения и введения изменений в данные находящиеся в системы или вывод на печатающее устройство и для наблюдения состояния системы и аварии. Коммутация. Используемые в системе CODEC по технологии CМOS соответствуют эксплутационным стандартам G-711, G-712 (ADI и A-law) MЭT [4]: - Сопротивления. Номинальное сопротивление выходных и входных линий составляют 600 Ом. - Шумы свободного канала. Канал, по которому в данный момент не проходит информация, обладает собственным шумом. - Шумы нагрузки. Канал, имеющий нормальное выходное сопротивление, обладает между выходным и входным концами уровнем шумов, не превышающим -65 дБмОр - Шум единичной частоты. Шум единичной частоты не превышает, дБмОр – 50. - Влияние шумов аппаратуры. Шум принимаемый аппаратурой не превышает –75 дБмОр, при условии что его вход питается с ИКМ сигналом с соответствующей выходной величиной номером один для A-low декодера. Искажение гармоник. Второй или третий гармоник выходящего сигнала бывает мин 40 дБ меньше основной частоты (при входном сигнале -10 дБмО и 300-3400 Гц). Интермодуляция. При наличии на входах сигналов 720 Гц и 1255 Гц с уровнем от 0 до 21 дБ на выходе возможна интермодуляция с уровнем сигнала мин. 35 дБ до уровня входящих сигналов. Изменение подъёма уровня сигнала в зависимости от уровня входа. Блок аварийной сигнализации FSP Блок FSP находящийся в верхней части статива указывает о наличии минорных и мажорных аварийных сигналов. Кроме этого он распределяет напряжения минус 48V поступающие с блока питания [4]. Индикация и функции блока FSP: - оба треугольника находящиеся в левой части блока указывают о состояния W-автоматов. Эти автоматы представляют входящие предохранители напряжения -48V1 и -48V2. - зеленые светодиоды (-48V1 ON и -48V2 ON) светят пока предохранители включены или есть входное напряжение минус 48V. FSP модуль содержит две платы, плата аварийной сигнализации. Эта плата управляет светодиодами минорной/мажорной аварийной сигнализации и светодиодами -48V1ОN и -48V2ОN. Одновременно с этим аварийное состояние подается к выносному блоку звуковой сигнализации, аварийное состояние минус 48V подается к модулю МХС. Плата питания. Плата питания вырабатывает напряжение плюс 48V необходимое для определения номера беспокоящего абонента по СЛ LOOP TIE TRUNK.
Виды коммутации Коммутация каналов. На рисунке 3.1 приведена структура системы коммутации каналов. На вход системы поступает простейший поток вызовов с параметром m. Для вызова, поступившего на вход системы, может потребоваться соединение с одним и только одним каналом, причем безразлично, с каким именно, и по какому пути. Длительность обслуживания для всех непотерянных вызовов предполагается независимой и распределена по одинаковому для всех вызовов экспоненциальному закону со средней длительностью, равной m-1. Параметры коммутационного поля считаются заданными. Любой вызов обслуживается управляющим устройством, которое получает информацию о получении вызова, его требованиях и состоянии самого коммутационного поля. На основании такой информации управляющее устройство принимает и осуществляет решение об обслуживании данного вызова, если в момент поступления вызова имеется хотя бы один свободный обслуживающий прибор и соединительный путь к нему через коммутационное поле, или отказе в обслуживании в противном случае. Предполагается, что дисциплина обслуживания зависит только от трех факторов: номера входа, которому принадлежит данный вызов, номера выхода (обслуживающего прибора или канала связи), с которым требуется соединение, и состояния коммутационного поля в момент поступления вызова, т. е. Предположим также, что занимаемые пути, а решение об обслуживании и установлении соединения принимается управляющим устройством с интенсивностью МС.
Структура системы коммутации
ИН – источник нагрузки; ОП – обслуживающий прибор.
Рисунок 2.8
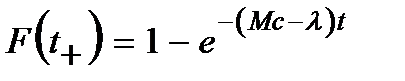
Влияние управляющего устройства сказывается только на этапе установления соединения, которое абонент ощущает в виде задержек зуммерных сигналов «Ответ станции» и «контроль посылки вызова». В уже установленное соединение управляющее устройство никаких задержек не вносит. Задержки зуммерных сигналов нормируются.
где, F(t+) – значение функции распределения времени ожидания (ФРВО) конца обслуживания вызова системой в момент tДОП. Для расчета производительности управляющего устройства исходными являются параметры F(t+), tДОП, m. Подставляя их в (2.1), итеративным приближением находим минимальную производительность управляющего устройства МС . Для полнодоступного пучка jХ=0, х=0, V-1, jV=1,
Исходными для расчета пропускной способности коммутационного поля являются параметры p и А. Подставляя их в (5.2), итеративным приближением находим минимальную емкость пучка, обеспечивающую требуемую пропускную способность [9]. Рассмотрим пример определения числа СЛ в системе с коммутацией каналов. Пример расчета выполнен на языке программирования Визуал-Бейсик. Задан простейший поток вызовов с нагрузкой А=90 Эрл, средняя продолжительность разговора μ =20 ч-1, норма потерь π =0, 001. Определить минимальную производительность управляющего устройства Мс и минимальную емкость пучка V. Коммутация пакетов. Под вызовом в системе с коммутацией пакетов понимается группа информационных символов фиксированной длины, открывающаяся заголовком и заканчивающаяся концевиком. Если параметр потока вызовов можно признать простейшим, то длительность обслуживания вызова—почти постоянная величина и для расчета функции распределения времени ожидания (ФРВО) очереди в пучке подходит модель Кроммелина, которая позволяет получить результат только в численном виде. Но тогда и конечный результат—ФРВО конца обслуживания вызова системой коммутации пакетов также будет описываться только численными методами и не может быть получен в виде аналитического выражения. Последнее явно предпочтительнее в части анализа функционирования системы и простоты вычислений даже в случае некоторого снижения точности. Поэтому считаем длительность обслуживания вызова случайной величиной, распределенной по экспоненциальному закону, со средним значением, равным длине пакета. Любой вызов (он же пакет) обслуживается по командам управляющего устройства, которое получает информацию о поступлении вызова, его требованиях, состоянии самой системы и т. д. Информация о требованиях вызова содержится в лидирующих битах пакета. Если имеется хотя бы один свободный обслуживающий прибор, то управляющее устройство немедленно занимает его поступившим вызовом. В противном случае управляющее устройство выдает команду источнику нагрузки на запись всего пакета в буферную память. При освобождении одного из обслуживающих приборов по нему сначала передается информация, записанная в памяти, а затем—вновь поступающая информация. Емкость буферной памяти считается неограниченной. Обслуживание вызовов из памяти происходит в порядке их поступления, длина пакета равна L бит. Время обслуживания вызова tДОП состоит из двух частей: постоянного времени t1=L/С1, необходимого для формирования пакета источником нагрузки опорной АТС, где С1—скорость формирования L бит пакета формирователем пакета, или времениth=L/С1 необходимого для приема пакета источником нагрузки (устройством обработки пакета) транзитнойАТС, где С2—скорость передачи пакета по каналу связи, и переменного времени t, возникающего за счет прохождения очередей. Значения tДОП, thи t связаны соотношением
tДОП = th + t.
Требуемому значению F(t+) удовлетворяет бесконечная совокупность значений МC и V. В системе с коммутацией пакетов параметр поступающего потока вызовов и интенсивность обслуживания вызова многократно возрастают по сравнению с одноименными параметрами в системе с быстрой коммутацией каналов, но интенсивность нагрузки снижается. В связи с этим дефицитным ресурсом в системе с коммутацией пакетов, по-видимому, будет производительность управляющего устройства Мc которая в конечном счете зависит от длины пакета. Тогда
С одной стороны, с увеличением длины пакета L снижается интенсивность поступления пакетов, что снижает дефицит производительности управляющего устройства Мc. С другой стороны, увеличение длины пакета приводит к снижению времени t обработки пакета системой коммутации из-за увеличения времени th и, наоборот, создает дефицит производительности управляющего устройства МС . Иначе говоря, при фиксированном значении производительности управляющего устройства Мс существует оптимальная длина пакета Lopt, которая находится из уравнения
где, Y=(MC – С)t. Раскрывается значения Y:
Y=(MC – С)t = MC tДОП - MC L/С2 - A tДОП С2 /L + A. (2.24)
Используя (5.5): Y/L = - MC /С2 - A tДОП 2 /L2=0, отсюда
Популярное:
|
Последнее изменение этой страницы: 2017-03-03; Просмотров: 863; Нарушение авторского права страницы


 , Эрл (2.1)
, Эрл (2.1) ,
,  .
. ,
,  .
. ,
,  .
. ,
,  Эрл (2.2)
Эрл (2.2) ,
,  .
. ,
,  .
. ,
,  .
. .
. , Эрл (2.3)
, Эрл (2.3) ,
,  .
. ,
,  .
. ,
,  .
. ,
,  , Эрл (2.4)
, Эрл (2.4) ,
,  .
. ,
,  .
. ,
,  .
. .
. Эрл (2.5)
Эрл (2.5) .
. , Эрл. (2.6)
, Эрл. (2.6) .
. , Эрл. (2.7)
, Эрл. (2.7) .
. , Эрл (2.8)
, Эрл (2.8) .
. Эрл (2.9)
Эрл (2.9)
 , Эрл (2.10)
, Эрл (2.10)
 (2.11)
(2.11) (15), kA — число коммутаторов звена А = 6 (4), mA — число выходов из коммутатора звена А = 20, nB — число входов в коммутатор звена В = 6 (4), mB — число выходов из коммутатора звена В = 20, kB — число коммутаторов звена В = 20, q — доступность в направлении = 2.
(15), kA — число коммутаторов звена А = 6 (4), mA — число выходов из коммутатора звена А = 20, nB — число входов в коммутатор звена В = 6 (4), mB — число выходов из коммутатора звена В = 20, kB — число коммутаторов звена В = 20, q — доступность в направлении = 2.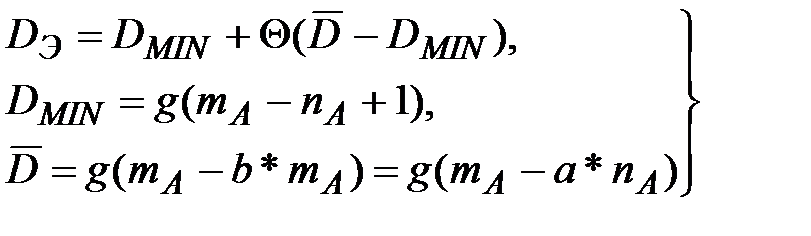 (2.12)
(2.12) (2.13)
(2.13)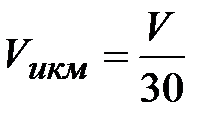 (2.14)
(2.14)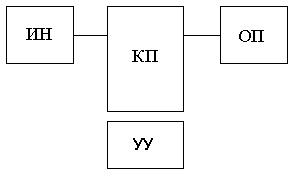
 (2.20)
(2.20)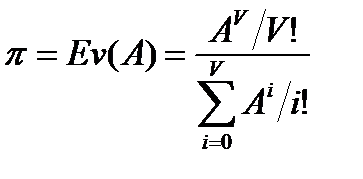 (2.21)
(2.21) (2.22)
(2.22)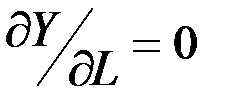 , (2.23)
, (2.23) (2.25)
(2.25)