|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Авторулевой. Назначение и принцип работы
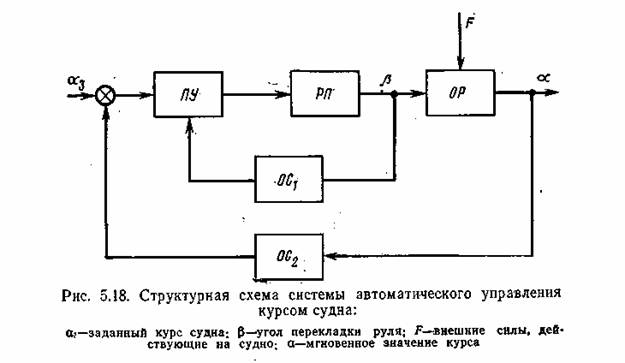
Все суда морского транспортного флота в настоящее время оборудуются системами автоматического управления (САУ) курсом судна. Основным элементом САУ является прибор управления (авторулевой). При правильной настройке авторулевой обеспечивает снижение потерь ходового времени до 3 % за счёт более точного удержания судна на заданном курсе и уменьшения тормозящего действия корпуса и руля. Углы перекладки руля при автоматическом управлении на 20 - 30 % меньше, чем при ручном. Адаптивные авторулевые используются главным образом на крупнотоннажных судах для улучшения их управляемости, особенно при движении с малой скоростью, на мелководье и в стеснённых условиях плавания. В настоящее время большинство транспортных судов оборудовано обычными бесконтактными авторулевыми отечественного производства типа АБР, АР, АТР и “Аист“, а также иностранного АЕГ (ФРГ), РФТ (ГДР), “Аркас” (Дания), “Декка” (Великобритания) и др. В соответствии с международными требованиями системы автоматического управления курсом должна обеспечивать: · переход с ручного управления на автоматическое и наоборот, с помощью не более чем двух органов управления за время не более 3с при любом положении пера руля. · переход с автоматического на ручное управление при любых неисправностях в системе автоматического управления; · фильтрацию сигналов управления для уменьшения числа кладок руля от рысканья при волнении; При переходе с ручного управления на автоматическое авторулевой должен автоматически вывести судно на заданный курс. В соответствии с требованиями Конвенции “Солас - 74” необходимо не более чем за 12 ч до отхода судна в рейс производить проверку работы как основных, так и аварийных каналов управления рулём. При этом должны быть проверены основной и вспомогательный рулевые приводы, система дистанционного управления рулевым приводом, посты управления рулём на ходовом мостике, аварийное энергопитание, указатели положения руля, аварийная сигнализация, работа автоматических ограничителей угла перекладки руля, а также работа средств связи мостика с румпельным отделением. Необходимо по меньшей мере раза 3 в мес. проводить учения по аварийному управлению рулём, включая непосредственное управление из румпельного отделения по командам с ходового мостика. В особо опасных в навигационном отношении районах каналы управления рулём левого и правого бортов должны работать одновременно. Устройство авторулевых САУ курсом судна состоит из прибора управления (ПУ), который обычно называется авторулевым, рулевого привода (РП) с управляющим органом — рулем, судна как объекта регулирования (ОР), а также внутренней (OC1) и внешней (ОС3) обратных связей (рис. 5.18).
Прибор управления системы представляет собой вычислительное устройство, построенное на электромеханических и электронных элементах и вырабатывающее сигналы управления, пропорциональные по величине углу и угловой скорости отклонения судна от заданного курса. В отечественных авторулевых, кроме того, имеется интегрирующее устройство, вырабатывающее сигнал, устраняющий снос судна при несимметричном рыскании. На пульте управления авторулевого размещаются все необходимые органы настройки, контроля и управления системы. На большинстве современных судов в качестве рулевого привода используются электрогидравлические рулевые машины, обеспечивающие перекладку руля со скоростью примерно 2, 5—3 град/сек. При одновременном включении насосов левого и правого бортов скорость перекладки руля увеличивается до 5 град/сек, что- положительно влияет на управляемость судна, особенно на малом ходу. Внутренняя обратная связь в системе осуществляется с помощью устройства, механически связанного с баллером руля и вырабатывающего электрический сигнал, пропорциональный углу поворота руля. Внешняя обратная связь обеспечивается гирокомпасом, который преобразует изменение курса судна в угол поворота сельсина-датчика курса, связанного с сельсином-приемником в авторулевом. Все существующие системы автоматического управления курсом судна, независимо от конструкции отдельных звеньев, работают по принципу отклонения, т. е. в авторулевом непрерывно сравниваются фактическое и заданное значения курса и вырабатывается сигнал управления. Под действием этого сигнала рулевой привод перекладывает руль и возвращает судно к заданному курсу. Сигнал внутренней отрицательной обратной связи останавливает перекладку руля, а затем возвращает руль в среднее положение. Сигнал, пропорциональный скорости поворота судна, повышает чувствительность авторулевого при отклонении судна от заданного курса и обеспечивает сдерживание при возвращении на заданный курс. Системы автоматического управления курсом удерживают судно на прямом заданном курсе в любую погоду при скорости хода более 5 узлов, а также позволяют изменять заданный курс при введении градусной поправки. При правильной настройке авторулевой позволяет экономить до 3% ходового времени за счет более точного удержания судна на заданном курсе и уменьшения тормозящего действия корпуса и руля; углы перекладки руля при автоматическом управлении на 20—30% меньше, чем при ручном. Современные авторулевые обеспечивают: Автоматическое ведение судна по заданному курсу в течение морских переходов любой продолжительности при любой погоде (авторулевой не рассчитан на работу при движении судна на заднем ходу); управление рулевым приводом в зависимости от угла и скорости ухода судна с курса; автоматическое устранение сноса судна, вызванного несимметричным рысканием под действием ветра, волнения и других причин (кроме АРМ-2); изменение курса судна при автоматическом управлении на любую величину; управление рулевым приводом вручную, пользуясь штурвалом следящего управления (кроме АРМ-2); изменение курса судна при помощи выносных постов управления в случае внезапного появления опасности (в некоторых комплектациях АБР и АР). Измерение запаса плавучести Запас плавучести обычно выражается в процентах от водоизмещения судна с полным грузом, т.е. является относительным запасом плавучести. W = Vн/ Vo 100 где Vн— объём подпалубных помещений над ватерлинией, Vo— весь объём подпалубных помещений. Так как объем подводной части корпуса можно выразить через главные размерения и коэффициент общей полноты, т. е. V=δ LBT, то водоизмещение (массу) судна можно представить в виде D=ρ δ LBT. Водоизмещение D (нагрузка масс) и координаты центра тяжести (центра масс) определяются расчетом, учитывающим массу и местоположение отдельных составляющих. Объемное водоизмещение, а также координаты центра величины С определяют по теоретическому чертежу методом трапеций в табличной форме. Вычисления начинают с определения площади шпангоутов. С этой целью площадь каждого шпангоута разбивают следами ватерлиний на n-е число участков, и криволинейные кромки заменяют прямыми Расчеты будут тем точнее, чем большее число ватерлинии проведено. Площадь шпангоута определяется как удвоенная сумма площадей трапеций, вписанных в этот шпангоут. Далее на прямой в определенном масштабе отмечают теоретические шпангоуты, восстанавливают перпендикуляры и на них также в масштабе отмечают соответствующие площади шпангоутов. Полученные точки соединяют плавной линией, которая характеризует изменение площади поперечного сечения судна по длине и называется строевой по шпангоутам. Если найти площадь фигуры, ограниченной строевой по шпангоутам, то она с учетом масштаба будет равна объемному водоизмещению судна. Площадь строевой по шпангоутам определяется так же, как и площадь шпангоутов. Мерой запаса плавучести служит объем надводной непроницаемой части судна от действующей ватерлинии до верхней палубы, имеющей водонепроницаемые закрытия. В этот объем могут входить и надстройки, если они также имеют водонепроницаемые закрытия. В случае попадания воды внутрь корпуса осадка судна увеличивается, но оно остается на плаву. Запас плавучести зависит от величины надводного борта: чем он больше, тем больше запас плавучести. Исходя из этого Регистр назначает каждому судну в зависимости от его размеров, назначения и района плавания минимальный надводный борт, который фиксируют в «Свидетельстве о грузовой марке», выдаваемом каждому судну. Обычно запас плавучести составляет 30—50 % водоизмещения, на танкерах 15 - 25%, на пассажирских судах до 100%.
Популярное:
|
Последнее изменение этой страницы: 2017-03-08; Просмотров: 2675; Нарушение авторского права страницы