
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Метод наискорейшего подъёма. ⇐ ПредыдущаяСтр 9 из 9
Модификацией метода градиентного подъёма является метод наискорейшего подъёма. В этом методе после вычисления градиента в точке
Решение задач математического программирования, то есть задач с ограничением обычно более трудоёмко. Рассмотрим простейшие задачи линейного программирования. В этом случае целевая функция и условия ограничения – линейны. Линейные ограничения на проектные параметры образуют в пространстве проектных параметров многогранник. Оптимальным решением будет соответствовать одна из вершин этого многогранника. Могут быть случаи, когда оптимальному решению соответствуют все точки на ребре или на целой грани многоугольника
Типичными задачами линейного программирования являются транспортная задача и задача об использовании ресурсов. Тема №10
Задания для самостоятельной проработки. Транспортная задача. Автобаза обслуживает три магазина, доставляя в них товары из двух торговых баз. Известно, что ежедневно вывозится с первой базы 12т. товара, а со второй базы 15т. При этом в магазины ежедневно завозится в первый – 8т., во второй 9т., в третий 10т. Стоимость перевозки одной тонны определяется таблицей.
Требуется спланировать перевозки так, чтобы их стоимость была минимальной. Введём переменные величины,
К данной системе необходимо добавить систему неравенств
А целевая функция
Система этих неравенств определяет область допустимых значений переменных
Теперь мы должны найти в этой области точки, обеспечивающие минимум целевой функции. Возьмём Минимальное значение целевой функции достигается в вершине области допустимых значений В общем случае при решении произвольной задачи линейного программирования, область допустимых значений образуется при пересечении конечного числа плоскостей. Эта область может быть как ограниченной, так и неограниченной и даже пустой, если система ограничений противоречива, в последнем случае задача решения не имеет. Обычно область решений представляет собой выпуклый многоугольник. Целевой функции соответствует гиперплоскость. Изменение значения целевой функции соответствует параллельной пересечения гиперплоскости (на единицу меньше). Минимальному значению целевой функции будет соответствовать точка касания гиперплоскости с одной точкой области Задача о ресурсах. В распоряжении бригады имеются следующие ресурсы: 300 кг металла, 100 м2 стекла, 160 чел.-ч. (человеко-часов) рабочего времени. Бригаде поручено изготовлять два наименования изделий: А и Б. Цена одного изделия А 1 тыс. р., для его изготовления необходимо 4 кг металла, 2 м2 стекла и 2 чел.-ч. рабочего времени. Цена одного изделия Б 1.2 тыс. р., для его изготовления необходимо 5 кг металла, 1 м2 стекла и 3 чел.-ч. рабочего времени. Требуется так спланировать объем выпуска продукции, чтобы ее стоимость была максимальной. Сначала сформулируем задачу математически. Обозначим через
Полная стоимость запланированной к производству продукции выражается формулой
Таким образом, мы имеем задачу линейного программирования, которая состоит в определении оптимальных значений проектных параметров Введём дополнительные переменные
При этом очевидно, что Выразим
В качестве опорного решения возьмем такое, которое соответствует нулевым значениям свободных параметров:
Этому решению соответствует нулевое значение целевой функции
Положим Таким образом, полагая
Значение целевой функции при этом будет равно
Новое решение лучше, поскольку значение целевой функции уменьшилось по сравнению с предыдущим. Следующий шаг начнем с выбора нового базиса. Примем ненулевые переменные
Выражение для целевой функций запишем через свободные параметры. Получим
Отсюда следует, что значение целевой функции по сравнению с предыдущей можно уменьшить за счет увеличения х2 поскольку коэффициент при этой переменной в отрицательный. При этом увеличение Быстрее всех нулевого значения достигнет переменная
При этом значение целевой функции равно
Поскольку коэффициенты при Таким образом, ответ на поставленную задачу об использовании ресурсов следующий: для получения максимальной суммарной стоимости продукции при заданных ресурсах необходимо запланировать изготовление изделий А в количестве 35 штук и изделий Б в количестве 30 штук. Суммарная стоимость продукции равна 71 тыс. р. При этом все ресурсы стекла и рабочего времени будут использованы, а металла останется 10 кг.
Волновое уравнение. Одним из наиболее распространенных в инженерной практике уравнений с частными производными второго порядка является волновое уравнение, описывающее различные виды колебаний. Поскольку колебания — процесс нестационарный, то одной из независимых переменных является время t. Кроме того, независимыми переменными в уравнении являются также пространственные координаты х, у, z. В зависимости от их количества различают одномерное, двумерное и трехмерное волновые уравнения. Одномерное волновое уравнение описывает продольные колебания стержня, сечения которого совершают плоскопараллельные колебательные движения, а также поперечные колебания тонкого стержня и другие задачи. Двумерное волновое уравнениеиспользуется для исследования колебаний тонкой пластины. Трехмерное волновое уравнениеописывает распространение волн в пространстве. Рассмотрим одномерное волновое уравнение, которое можно записать в виде
Для поперечных колебаний струны искомая функция U(x, t) описывает положение струны в момент t. В этом случае
Решим задачу Коши для этого уравнения. Вот условия задачи:
Эти условия описывают начальную форму струны На практике чаще приходится решать не задачу Коши для бесконечной струны, а смешанную задачу для ограниченной струны некоторой длины
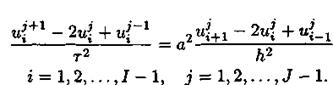
Для решения такой задачи используем явную трехслойную схему типа крест. Заменим в начальном уравнении вторые производные искомой функции U по t и х их конечно-разностными соотношениями с помощью значений сеточной функции
Отсюда можно найти явное выражение для значения сеточной функции на (j + 1)-м слое:
Здесь, как обычно в трехслойных схемах, для определения неизвестных значений на (j + 1)-м слое нужно знать решения на j-м и (j — 1)-м слоях. Поэтому начать счет можно лишь для второго слоя, а решения на нулевом и первом слоях должны быть известны. Они находятся с помощью начальных условий. На нулевом слое имеем
Для получения решения на первом слое воспользуемся вторым начальным условием. Производную
Из этого соотношения можно найти значения сеточной функции на первом временном слое:
Отметим, что аппроксимация начального условия в таком виде ухудшает аппроксимацию исходной дифференциальной задачи: погрешность аппроксимации становится порядка
Так как,
то:
Теперь разностная схема обладает погрешностью аппроксимации порядка Рассмотренная разностная схема решения задачи условно устойчива. Необходимое и достаточное условие устойчивости имеет вид
Следовательно, при выполнении этого условия и с учетом аппроксимации схема сходится к исходной задаче со скоростью Уравнение Лапласа. Многие стационарные физические задачи (исследования потенциальных течений жидкости, определение формы нагруженной мембраны, задачи теплопроводности и диффузии в стационарных случаях и др.) сводятся к решению уравнения Пуассонавида
При F(x, у, z) = 0, уравнение Пуассона называют уравнением Лапласа.Для простоты будем рассматривать двумерное уравнение Лапласа
Решение этого уравнения будем искать для некоторой ограниченной области G изменения независимых переменных х, у. Границей области G является замкнутая линия L. Для полной формулировки краевой задачи кроме уравнения Лапласа нужно задать граничное условие на границе L.Примем его в виде
Задача, состоящая в решении уравнения Лапласа (или Пуассона) при заданных значениях искомой функции на границе расчетной области, называется задачей Дирихле. Одним из способов решения стационарных эллиптических задач, в том числе и краевой задачи, является их сведение к решению некоторой фиктивной нестационарной задачи (гиперболической или параболической), найденное решение которой при достаточно больших значениях времени t близко к решению исходной задачи. Такой способ решения называется методом установления. Поскольку решение U(x, y) уравнения Лапласа не зависит от времени, то можно в это уравнение добавить равный нулю (при точном решении) член
Это — известное нам уравнение теплопроводности, для которого мы уже строили разностные схемы. Остается только задать начальное условие. Его можно принять практически в произвольном виде, согласованном с граничными условиями. Положим
Граничное условие при этом остается стационарным, т. е. не зависящим от времени.
Метод установления фактически представляет итерационный процесс, причем на каждой итерации значения искомой функции получаются путем численного решения некоторой вспомогательной задачи. В теории разностных схем показано, что этот итерационный процесс сходится к решению исходной задачи, если такое стационарное решение существует. Другой способ решения задачи Дирихле состоит в построении разностной схемы путем аппроксимации уравнения Лапласа. Введем в прямоугольной области G сетку с помощью координатных прямых х = const и у = const. Примем, для простоты значения шагов по переменным, х и у равными h (предполагается, что стороны области G соизмеримы). Значения функции U в узлах
С помощью данного уравнения можно записать систему линейных алгебраических уравнений относительно значений сеточной функции в узлах в виде
Значения сеточной функции в узлах, расположенных на границе расчетной области, могут быть найдены из граничного условия:
Перейдем теперь к решению полученной системы. Каждое уравнение системы (за исключением тех, которые соответствуют узлам, расположенным вблизи границ) содержит пять неизвестных. Одним из наиболее распространенных методов решения этой системы линейных уравнений является итерационный метод. Каждое из уравнений записываем в виде, разрешенном относительно значения
В ряде случаев уравнение с частными производными удобно привести к системе обыкновенных дифференциальных уравнений, в которых оставлены производные искомой функции лишь по одной переменной. Такой способ можно использовать и для решения уравнения Лапласа. Пусть требуется решить для него задачу Дирихле в прямоугольнике ABCD. Разобьем прямоугольник на полосы с помощью прямых, параллельных Построим разностную схему, для определения значений функций
Таким образом, решение задачи Дирихле сводятся к решению краевой задачи для системы обыкновенных дифференциальных уравнений относительно значений искомой функции вдоль прямых
Метод прямых широко, используется для решения нестационарных задач. Например, если имеются две независимые переменные х, t, а искомый параметр является гладкой функцией переменной х, то дискретизация вводится по этой переменной. Тогда исходная задача заменяется задачей Коши для системы обыкновенных дифференциальных уравнений вида
|
Последнее изменение этой страницы: 2017-03-11; Просмотров: 1007; Нарушение авторского права страницы
 движутся в направлении градиента, пока целевая функция продолжает возрастать до точки
движутся в направлении градиента, пока целевая функция продолжает возрастать до точки  . В точке
. В точке 

















 соответствующие количеству товара доставляемого в первый, второй и третий магазины соответственно;
соответствующие количеству товара доставляемого в первый, второй и третий магазины соответственно;  - количество товара поставляемого со второй базы. Стоимость перевозок запишем в виде:
- количество товара поставляемого со второй базы. Стоимость перевозок запишем в виде:  - это и есть целевая функция.
- это и есть целевая функция. - проектные параметры. На проектные параметры накладываются ограничения. Во-первых, это ограничение равенства, оно следует из условия задачи и описывает количество товаров, которые вывозят с баз и доставляют в магазины.
- проектные параметры. На проектные параметры накладываются ограничения. Во-первых, это ограничение равенства, оно следует из условия задачи и описывает количество товаров, которые вывозят с баз и доставляют в магазины.





 . В этой системе равенств независимыми являются только четыре уравнения, поэтому из шести независимых
. В этой системе равенств независимыми являются только четыре уравнения, поэтому из шести независимых  фактически независимыми являются только две переменные
фактически независимыми являются только две переменные  . Тогда ограничения, налаживаемые на переменные можно записать как
. Тогда ограничения, налаживаемые на переменные можно записать как

 принимает вид
принимает вид  . Теперь условия неравенства принимают вид.
. Теперь условия неравенства принимают вид.

 . запишем систему неравенств в виде
. запишем систему неравенств в виде


 и
и 
 - это точки, которые являются узлами области
- это точки, которые являются узлами области 

 , такие, чтобы при их прибавлении к левым частям соотношений неравенства превращались в равенства. Тогда ограничения примут вид
, такие, чтобы при их прибавлении к левым частям соотношений неравенства превращались в равенства. Тогда ограничения примут вид
 ,
,  ,
,  . Заметим, что введение дополнительных неизвестных не повлияло на вид целевой функции, которая зависит только от параметров
. Заметим, что введение дополнительных неизвестных не повлияло на вид целевой функции, которая зависит только от параметров 


 до тех пор, пока переменные
до тех пор, пока переменные 

 в качестве базисных, а нулевые переменные
в качестве базисных, а нулевые переменные  в качестве свободных.
в качестве свободных. Получим
Получим

 недопустимо, поскольку это привело бы к возрастанию целевой функции; поэтому пусть
недопустимо, поскольку это привело бы к возрастанию целевой функции; поэтому пусть  при х2 = 30. Дальнейшее увеличение х2 поэтому невозможно. Следовательно, получаем новое опорное решение, соответствующее значениям х2 = 30,
при х2 = 30. Дальнейшее увеличение х2 поэтому невозможно. Следовательно, получаем новое опорное решение, соответствующее значениям х2 = 30, 
 Покажем, что полученное решение является оптимальным. Для проведения следующего шага ненулевые переменные
Покажем, что полученное решение является оптимальным. Для проведения следующего шага ненулевые переменные  , нужно принять в качестве базисных, а нулевые переменные х4, х5 — в качестве свободных переменных. В этом случае целевую функцию можно записать в виде
, нужно принять в качестве базисных, а нулевые переменные х4, х5 — в качестве свободных переменных. В этом случае целевую функцию можно записать в виде =71 является оптимальным.
=71 является оптимальным.
 , где Т — натяжение струны,
, где Т — натяжение струны,  — ее линейная плотность. Уравнение записано для случая свободных колебаний. Сопротивление среды колебательному процессу не учитывается.
— ее линейная плотность. Уравнение записано для случая свободных колебаний. Сопротивление среды колебательному процессу не учитывается.

 и скорость ее точек.
и скорость ее точек. . В этом случае задают граничные условия на ее концах. В частности, при закрепленных концах их смещения равны нулю, и граничные условия имеют вид
. В этом случае задают граничные условия на ее концах. В частности, при закрепленных концах их смещения равны нулю, и граничные условия имеют вид
 в узлах сетки
в узлах сетки 


 заменим конечно-разностной аппроксимацией.
заменим конечно-разностной аппроксимацией.

 , т. е. первого порядка по
, т. е. первого порядка по  , хотя сама схема имеет второй порядок аппроксимации по h и
, хотя сама схема имеет второй порядок аппроксимации по h и 

 .
.





 Процесс численного решения такого уравнения
Процесс численного решения такого уравнения  состоит в переходе при
состоит в переходе при  от произвольного значения к искомому стационарному решению. Счет ведется до выхода решения на стационарный режим. Естественно, ограничиваются решением при некотором достаточно большом t, если искомые значения на двух последовательных слоях совпадают с заданной степенью точности.
от произвольного значения к искомому стационарному решению. Счет ведется до выхода решения на стационарный режим. Естественно, ограничиваются решением при некотором достаточно большом t, если искомые значения на двух последовательных слоях совпадают с заданной степенью точности. заменим значениями сеточной функции
заменим значениями сеточной функции  Тогда, аппроксимируя в уравнении Лапласа вторые производные с помощью отношений конечных разностей, получим разностное уравнение.
Тогда, аппроксимируя в уравнении Лапласа вторые производные с помощью отношений конечных разностей, получим разностное уравнение.



 оси х. Для определенности проведем три отрезка
оси х. Для определенности проведем три отрезка  , которые разделят прямоугольник на четыре полосы постоянной ширины h. Решение U задачи Дирихле приближенно заменим набором функций
, которые разделят прямоугольник на четыре полосы постоянной ширины h. Решение U задачи Дирихле приближенно заменим набором функций  , каждая из которых определена на отрезке U и зависит только от одной переменной х, т. е.
, каждая из которых определена на отрезке U и зависит только от одной переменной х, т. е.  для
для  =1, 2, 3. На отрезках
=1, 2, 3. На отрезках  значения
значения 

