
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Сложение и вычитание векторов.Стр 1 из 9Следующая ⇒
Сложение и вычитание векторов. Скалярное произведение – скаляр равный произведению модулей этих векторов на косинус. Кинети́ ческая эне́ ргия — энергия механической системы, зависящая от скоростей движения её точек. Часто выделяют кинетическую энергию поступательного и вращательного движения. Более строго, кинетическая энергия есть разность между полной энергией системы и её энергией покоя; таким образом, кинетическая энергия — часть полной энергии, обусловленная движением. Физический смысл Рассмотрим систему, состоящую из одной частицы, и запишем второй закон Ньютона:
Если система замкнута, то есть
остаётся постоянной. Эта величина называется кинетической энергией частицы. Если система изолирована, то кинетическая энергия является интегралом движения. Для абсолютно твёрдого тела полную кинетическую энергию можно записать в виде суммы кинетической энергии поступательного и вращательного движения:
При скоростях, близких к скорости света, кинетическая энергия любого объекта равна
где:
2. Механи́ ческим движе́ нием тела называется изменение его положения в пространстве относительно других тел с течением времени. При этом тела взаимодействуют по законам механики. Раздел механики, описывающий геометрические свойства движения без учёта причин, его вызывающих, называется кинематикой. В более общем значении движением называется изменение состояния физической системы с течением времени. Например, можно говорить о движении волны в среде. Наиболее простое движение тела — такое, при котором все точки тела движутся одинаково, описывая одинаковые траектории. Такое движение называется поступательным. Мы получим этот тип движения, двигая лучинку так, чтобы она все время оставалась параллельной самой себе. При поступательном движении траектории могут быть как прямыми (рис. 7, а), так и кривыми (рис. 7, б) линиями. Другой простой тип движения — это вращательное движение тела, или вращение. При вращательном движении все точки тела движутся по окружностям, центры которых лежат на прямой. Эту прямую называют осью вращения (прямая 00' на рис.9). Окружности лежат в парал-лельных плоскостях, перпендикулярных к оси вращения. Точки тела, лежащие на оси вращения, остаются неподвижными. Вращение не является поступательным движением. Физической моделью процесса или явления называется его математическая модель, составленная из идеальных физических объектов. Изучением физических моделей самих по себе занимается теоретическая физика. Простейшей физической моделью в классической механике является материальная точка. Несколько более сложные модели: идеальный газ, идеальная жидкость. Материа́ льная то́ чка (частица) — простейшая физическая модель в механике — тело, размеры которого допустимо считать бесконечно малыми в пределах допущений исследуемой задачи. Система отсчёта — это совокупность тела отсчета, связанной с ним системы координат и системы отсчёта времени, по отношению к которым рассматривается движение (или равновесие) каких-либо материальных точек или тел. Абсолю́ тно твёрдое те́ ло – Сплошна́ я среда́ — механическая система, обладающая бесконечным числом внутренних степеней свободы. Её движение в пространстве, в отличие от других механических систем, описывается не координатами и скоростями отдельных частиц, а скалярным полем плотности и векторным полем скоростей. В зависимости от задач, к этим полям могут добавляться поля других физических величин (концентрация, температура, поляризованность и др.) 3. Движения центра масс. 4. Траекто́ рия материа́ льной то́ чки — линия в трёхмерном пространстве, представляющая собой множество точек, в которых находилась, находится или будет находиться материальная точка при своём перемещении в пространстве.[1]. Существенно, что понятие о траектории имеет физический смысл даже при отсутствии какого-либо по ней движения. Кроме того, и при наличии движущегося по ней объекта, траектория сама по себе не может ничего определённого сказать в отношении причин его движения, то есть о действующих на него силах.[2] Не менее существенно, что форма траектории неотрывно связана и зависит от конкретной системой отсчёта, в которой описывается движение. Перемеще́ ние (в кинематике) — изменение местоположения физического тела в пространстве относительно выбранной системы отсчёта. Также перемещением называют вектор, характеризующий это изменение. Обладает свойством аддитивности. Длина отрезка — это модуль перемещения, измеряется в метрах (СИ). Можно определить перемещение, как изменение радиус-вектора точки: Модуль перемещения совпадает с пройденным путём в том и только в том случае, если при движении направление перемещения не изменяется. При этом траекторией будет отрезок прямой. В любом другом случае, например, при криволинейном движении, из неравенства треугольника следует, что путь строго больше. Путь - длина участка траектории материальной точки. Ско́ рость — векторная физическая величина, характеризующая быстроту перемещения и направления движения материальной точки в пространстве относительно выбранной системы отсчёта (например, угловая скорость). Этим же словом может называться скалярная величина, точнее модуль производной радиус-вектора.
5. Механическая работа — это физическая величина, являющаяся скалярной количественной мерой действия силы или сил на тело или систему, зависящая от численной величины, направления силы (сил) и от перемещения точки (точек) тела или системы. Мо́ щность — физическая величина, равная отношению работы, выполняемой за некоторый промежуток времени, к этому промежутку времени. Различают среднюю мощность за промежуток времени Работа внутренних сил при деформации упругого тела, равная работе, произведенной внешними силами, называется Р. Д. упругого тела.
6. Ускоре́ ние — производная скорости по времени, векторная величина, показывающая, насколько изменяется вектор скорости точки (тела) при её движении за единицу времени (т.е. ускорение учитывает не только изменение величины скорости, но и её направления). Тангенциа́ льное ускоре́ ние — компонента ускорения, направленная по касательной к траектории движения. Характеризует изменение модуля скорости. (Нормальная компонента характеризует изменение направления скорости.) Равно произведению единичного вектора, направленного по скорости движения, на производную модуля скорости по времени. Таким образом, направлено в ту же сторону, что и вектор скорости при ускоренном движении (положительная производная) и в противоположную при замедленном (отрицательная производная). Центростремительное ускорение — компонента ускорения точки, характеризующая изменение направления вектора скорости для траектории с кривизной. (Вторая компонента, тангенциальное ускорение, характеризует изменением модуля скорости.) Направлено к центру кривизны траектории, чем и обусловлен термин. По величине равно квадрату скорости, поделенному на радиус кривизны. Термин «центростремительное ускорение» в целом эквивалентен термину « нормальное ускорение »; различия лишь стилистические (иногда исторические). Наиболее простым примером центростремительного ускорения является вектор ускорения при равномерном движении по окружности (направленный к центру окружности). Радиус кривизны –
7. Зако́ н сохране́ ния эне́ ргии — фундаментальный закон природы, установленный эмпирически и заключающийся в том, что для изолированной физической системы может быть введена скалярная физическая величина, являющаяся функцией параметров системы и называемая энергией, которая сохраняется с течением времени. Поскольку закон сохранения энергии относится не к конкретным величинам и явлениям, а отражает общую, применимую везде и всегда, закономерность, то его можно именовать не законом, а принципом сохранения энергии.
8. Кинематика вращательного движения –
Углова́ я ско́ рость — векторная физическая величина, характеризующая скорость вращения тела. Вектор угловой скорости по величине равен углу поворота тела в единицу времени:
Углово́ е ускоре́ ние — псевдовекторная физическая величина, характеризующая быстроту изменения угловой скорости твёрдого тела.
Период — время (в секундах) между двумя последовательными прохождениями тела через одно и то же положение в одном и том же направлении, величина, обратная частоте. Первый закон Ньютона Первый закон Ньютона постулирует наличие такого явления, как инерция тел. Поэтому он также известен как Закон инерции. Инерция — это явление сохранения телом скорости движения (и по величине, и по направлению), когда на тело не действуют никакие силы. Чтобы изменить скорость движения, на тело необходимо подействовать с некоторой силой. Естественно, результат действия одинаковых по величине сил на различные тела будет различным. Таким образом, говорят, что тела обладают инертностью. Инертность — это свойство тел сопротивляться изменению их текущего состояния. Величина инертности характеризуется массой тела. Современная формулировка В современной физике первый закон Ньютона принято формулировать в следующем виде[1]:
Закон верен также в ситуации, когда внешние воздействия присутствуют, но взаимно компенсируются (это следует из 2-го закона Ньютона, так как скомпенсированные силы сообщают телу нулевое суммарное ускорение). 12. Момент инерции — скалярная физическая величина, мера инертности во вращательном движении вокруг оси, подобно тому, как масса тела является мерой его инертности в поступательном движении. Характеризуется распределением масс в теле: момент инерции равен сумме произведений элементарных масс на квадрат их расстояний до базового множества (точки, прямой или плоскости). Для того чтобы сохранить положение оси вращения твердого тела с течением времени неизменным, используют подшипники, в которых она удерживается. Однако существуют такие оси вращения тел, которые не изменяют своей ориентации в пространстве без действия на нее внешних сил. Эти оси называются свободными осями (или осями свободного вращения). Можно доказать, что в любом теле существуют три взаимно перпендикулярные оси, проходящие через центр масс тела, которые могут служить свободными осями (они называются главными осями инерции тела). Оси, относительно которых центробежный момент инерции обращается в нуль, называются главными осями инерции. Если начало такой системы помещено в центре тяжести фигуры, то это будут главные центральные оси. Моменты инерции относительно главных осей называются главными моментами инерции. получим следующую формулу для определения главных моментов инерции:
13. масса – мера инертности. Величин аддитивная, постоянная. И́ мпульс ( Количество движения ) — векторная физическая величина, характеризующая меру механического движения тела. В классической механике импульс тела равен произведению массы m этого тела на его скорость v, направление импульса совпадает с направлением вектора скорости:
Второй закон Ньютона — дифференциальный закон движения, описывающий взаимосвязь между приложенной к материальной точке силой и получающимся от этого ускорением этой точки. Фактически, второй закон Ньютона вводит массу как меру проявления инертности материальной точки в выбранной инерциальной системе отсчёта (ИСО). Современная формулировка
В случае, когда масса материальной точки меняется со временем, второй закон Ньютона формулируется с использованием понятия импульс:
Когда на тело действуют несколько сил, с учётом принципа суперпозиции второй закон Ньютона записывается:
14. Механическая работа — это физическая величина, являющаяся скалярной количественной мерой действия силы или сил на тело или систему, зависящая от численной величины, направления силы (сил) и от перемещения точки (точек) тела или системы. Если сила не постоянна, то в этом случае она вычисляется как интеграл[5]:
Если существует зависимость силы от координат[6], интеграл определяется[7] следующим образом:
В физике консервати́ вные си́ лы (потенциальные силы) — силы, работа которых не зависит от формы траектории (зависит только от начальной и конечной точки приложения сил). Отсюда следует определение: консервативные силы — такие силы, работа которых по любой замкнутой траектории равна 0. Если в системе действуют только консервативные силы, то механическая энергия системы сохраняется. Для консервативных сил выполняются следующие тождества:
СИЛА ТЯЖЕСТИ, сила P, действующая на любое тело, находящееся вблизи земной поверхности, и определяемая как геометрическая сумма силы притяжения Земли F и центробежной силы инерции Q, учитывающей эффект суточного вращения Земли. Направление силы тяжести - вертикаль в данной точке земной поверхности. Аналогично определяется сила тяжести на любом небесном теле. Fт=mg Сила F, действующая на точку P, называется центральной с центром в точке O, если во всё время движения она действует вдоль линии, соединяющей точки O и P Примеры центральных сил
15. Третий закон Ньютона Этот закон объясняет, что происходит с двумя взаимодействующими телами. Возьмём для примера замкнутую систему, состоящую из двух тел. Первое тело может действовать на второе с некоторой силой Современная формулировка
Закон отражает принцип парного взаимодействия. То есть все силы в природе рождаются парами. 16. абсолютно твердое тело - в нем расстояние между любыми двумя точками не меняется в процессе движения. Описание движения твердого тела кроме самостоятельного значения имеет большое значение и в применении к описаниям других видов движения. Система отсчета, служащая для пространственно-временного описания различных движений может быть связана только с твердым телом. Поэтому изучение движения твердых тел равносильно изучению движений систем отсчета. Результаты этого раздела будут неоднократно использоваться в дальнейшем. Имеется пять видов движения твердого тела: 1)поступательное, если прямая, соединяющая любые две точки тела, перемещается, оставаясь параллельной своему начальному положению, например движение трамвая на прямом участке пути; 2) вращательное, если все точки лежащие на некоторой прямой, называемой осью вращения, остаются неподвижными, например движение двери при открывании и закрывании; 3) плоское, если все точки тела движутся в плоскостях, параллельных некоторой плоскости, неподвижной в рассматриваемой системе отсчета, например качение колеса на прямом участке пути; 4)сферическое, если одна из точек тела остается все время неподвижной в рассматриваемой системе отсчета, например движение гироскопа с тремя степенями свободы в карданном подвесе; 5)свободное, если нет перечисленных выше четырех ограничений, например движение свободного произвольного брошенного тела вблизи поверхности Земли. Первые два движения являются основными движениями твердого тела. Остальные виды движения твердого тела можно свести к одному из основных движений или к их совокупности (это будет показано на примере плоского движения). МГНОВЕННАЯ ОСЬ ВРАЩЕНИЯ прямая, неподвижная в данный момент в нек-рой инерциальной системе отсчёта, относительно к-рой сложное движение твёрдого тела в этот момент можно представить как вращат. вокруг этой прямой. М. о. в. может лежать как внутри тела, так и вне его. С течением времени положение М. о. в. изменяется относительно как неподвижной системы отсчёта, так и системы отсчёта, движущейся вместе с телом. 17. При́ нцип относи́ тельности — фундаментальный физический принцип, согласно которому все физические процессы в инерциальных системах отсчёта протекают одинаково, независимо от того, неподвижна ли система или она находится в состоянии равномерного и прямолинейного движения. «Если законы механики справедливы в одной системе координат, то они справедливы и в любой другой системе, движущейся прямолинейно и равномерно относительно первой.» Такие системы называются инерциальными, поскольку движение в них подчиняется закону инерции, гласящему: «Всякое тело сохраняет состояние покоя или равномерного прямолинейного движения, если только оно не вынуждено изменить его под влиянием движущихся сил." 18. Примерами консервативных сил являются: сила тяжести, сила упругости. Примерами неконсервативных сил являются сила трения и сила сопротивления среды. В физике, имеющей дело с силовыми полями, математическое условие потенциальности силового поля можно представить как требование равенства нулю работы при перемещении частицы, на которую действует поле, по замкнутому контуру. В качестве потенциала поля в этом случае можно выбрать работу по перемещению пробной частицы из некоторой произвольно выбранной исходной точки в заданную точку (по определению эта работа не зависит от пути перемещения). Например, потенциальными являются статическое электрическое поле, а также гравитационное поле в ньютоновой теории гравитации. Связь силы и потенциальной энергии. Каждой точке потенциального поля соответствует, с одной стороны, некоторое значение вектора силы
Для установления этой связи вычислим элементарную работу
где Поскольку в данном случае работа совершается за счет запаса потенциальной энергии
Из двух последних выражений получаем
Откуда
Последнее выражение дает среднее значение получить значение
Так как
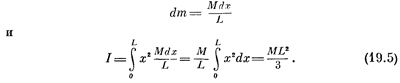
Эквипотенциальная поверхность — понятие, применимое к любому потенциальному векторному полю, например, к статическому электрическому полю или к ньютоновскому гравитационному полю. Эквипотенциальная поверхность — это поверхность, на которой скалярный потенциал данного потенциального поля принимает постоянное значение (поверхность уровня потенциала). Другое, эквивалентное, определение — поверхность, в любой своей точке ортогональная силовым линиям поля. 19. Релятивистская кинематика длины отрезков и промежутки времени между двумя событиями могут изменяться при переходе от одной системы отсчёта к другой. Относительной становится также одновременность. В релятивистской механике вместо отдельных понятий пространство и время вводится понятие пространства-времени, в котором инвариантным относительно преобразований Лоренца является величина, называемая интервалом. Опыт майкельсона морли. 20. Момент инерции стержня В качестве простого примера рассмотрим стержень, вращающийся относительно оси, проходящей через его конец и перпендикулярной к нему (фиг. 19.3). Нам нужно просуммировать теперь все массы, умноженные на квадраты расстояния х (в этом случае все у — нулевые). Под суммой, разумеется, я имею в виду интеграл от х2, умноженный на «элементики» массы. Если мы разделим стержень на кусочки длиной dx, то соответствующий элемент массы будет пропорционален dx, а если бы dx составляло длину всего стержня, то его масса была бы равна М. Поэтому
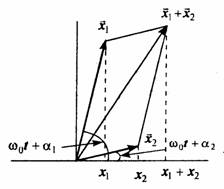
Сложение колебаний Колебания могут складываться и при этом усиливать или гасить друг друга, или изменять траекторию движения тела. Рассмотрим сложение колебаний, совершаемых в одном направлении. Пусть осциллятор совершает два одновременных колебания в одном направлении и одинаковой частоты ω 0: x1=A1cos(ω 0t+a1) и x2=A2cos(ω 0t+a2). Бие́ ния — явление, возникающее при наложении двух гармонических колебаний, выражающееся в периодическом уменьшении и увеличении амплитуды суммарного сигнала. Биения модулируются по амплитуде. Распространение такого вида колебаний менее эффективно. Частота изменения амплитуды суммарного сигнала равна разности частот двух исходных сигналов. Биения возникают от того, что один из двух сигналов постоянно отстаёт от другого по фазе и в те моменты, когда колебания происходят синфазно, суммарный сигнал оказывается усилен, а в те моменты, когда два сигнала оказываются в противофазе, они взаимно гасят друг друга. Эти моменты периодически сменяют друг друга по мере того как нарастает отставание. 34. При́ нцип относи́ тельности — фундаментальный физический принцип, согласно которому все физические процессы в инерциальных системах отсчёта протекают одинаково, независимо от того, неподвижна ли система или она находится в состоянии равномерного и прямолинейного движения. «Если законы механики справедливы в одной системе координат, то они справедливы и в любой другой системе, движущейся прямолинейно и равномерно относительно первой.» Такие системы называются инерциальными, поскольку движение в них подчиняется закону инерции, гласящему: «Всякое тело сохраняет состояние покоя или равномерного прямолинейного движения, если только оно не вынуждено изменить его под влиянием движущихся сил." 35. Найдем результат сложения двух гармонических колебаний одинаковой частоты ω, которые происходят во взаимно перпендикулярных направлениях вдоль осей х и у. Начало отсчета для простоты выберем так, чтобы начальная фаза первого колебания была равна нулю, и запишем это в виде
где α — разность фаз обоих колебаний, А и В равны амплитудам складываемых колебаний. Уравнение траектории результирующего колебания определим исключением из формул (1) времени t. Записывая складываемые колебания как
и заменяя во втором уравнении
Фигу́ ры Лиссажу́ — замкнутые траектории, прочерчиваемые точкой, совершающей одновременно два гармонических колебания в двух взаимно перпендикулярных направлениях. Впервые изучены французским учёным Жюлем Антуаном Лиссажу. Вид фигур зависит от соотношения между периодами (частотами), фазами и амплитудами обоих колебаний. В простейшем случае равенства обоих периодов фигуры представляют собой эллипсы, которые при разности фаз 0 или
36. Свободные гармонические колебания совершаются под действием внутренних сил системы после того, как система была выведена из положения равновесия. Чтобы свободные колебания были гармоническими, необходимо, чтобы колебательная система была линейной (описывалась линейными уравнениями движения), и в ней отсутствовала диссипация энергии (последняя вызвала бы затухание). 37. Потенциальные силы, силы, работа которых зависит только от начального и конечного положения точек их приложения и не зависит ни от вида траекторий, ни от закона движения этих точек. При замкнутой траектории работа потенциальной силы всегда равна нулю. К потенциальным силам относятся силы тяготения, силы упругости, электростатические силы и некоторые другие. Потенциальная энергия, часть общей механической энергии системы, зависящая от взаимного расположения частиц, составляющих эту систему, и от их положений во внешнем силовом поле (например, гравитационном; см. Поля физические). Численно П. э. системы в данном её положении равна работе, которую произведут действующие на систему силы при перемещении системы из этого положения в то, где П. э. условно принимается равной нулю (П = 0). Из определения следует, что понятие П. э. имеет место только для консервативных систем, т. е. систем, у которых работа действующих сил зависит только от начального и конечного положения системы. Так, для груза весом Р, поднятого на высоту h, П. э. будет равна П = Ph (П = 0 при h = 0); для груза, прикрепленного к пружине, П = 0, 5сl2, где l — удлинение (сжатие) пружины, с — её коэффициент жёсткости (П = 0 при l = 0); для двух частиц с массами m1 и m2, притягивающихся по закону всемирного тяготения, П = —fm1m2/r, где f — гравитационная постоянная, r — расстояние между частицами (П = 0 при r = ¥ ); Эквипотенциальная поверхность — понятие, применимое к любому потенциальному векторному полю, например, к статическому электрическому полю или к ньютоновскому гравитационному полю. Эквипотенциальная поверхность — это поверхность, на которой скалярный потенциал данного потенциального поля принимает постоянное значение (поверхность уровня потенциала). Другое, эквивалентное, определение — поверхность, в любой своей точке ортогональная силовым линиям поля. Связь силы и потенциальной энергии. Каждой точке потенциального поля соответствует, с одной стороны, некоторое значение вектора силы
Для установления этой связи вычислим элементарную работу
где Поскольку в данном случае работа совершается за счет запаса потенциальной энергии
Из двух последних выражений получаем
Откуда
Последнее выражение дает среднее значение получить значение
Так как
Это соотношение справедливо для любого направления в пространстве, в частности и для направлений декартовых координатных осей х, у, z:
Эта формула определяет проекции вектора силы на координатные оси. Если известны эти проекции, оказывается определенным и сам вектор силы:
в математике вектор где а - скалярная функция х, у, z, называется градиентом этого скаляра обозначается символом |
Последнее изменение этой страницы: 2017-03-14; Просмотров: 678; Нарушение авторского права страницы

 — есть результирующая всех сил, действующих на тело. Скалярно умножим уравнение на перемещение частицы
— есть результирующая всех сил, действующих на тело. Скалярно умножим уравнение на перемещение частицы  . Учитывая, что
. Учитывая, что  , Получим:
, Получим: 
 , то
, то  , а величина
, а величина
 — масса тела
— масса тела  — скорость центра масс тела
— скорость центра масс тела  — момент инерции тела
— момент инерции тела  — угловая скорость тела.
— угловая скорость тела.
 — скорость света в вакууме (
— скорость света в вакууме (  — энергия покоя).
— энергия покоя). .
. .
.

 .
.




 ,
,  — ротор консервативных сил равен 0;
— ротор консервативных сил равен 0;  — работа консервативных сил по произвольному замкнутому контуру равна 0;
— работа консервативных сил по произвольному замкнутому контуру равна 0;  — консервативная сила является градиентом некой скалярной функции
— консервативная сила является градиентом некой скалярной функции  , называемой силовой. Эта функция равна потенциальной энергии взятой с обратным знаком.
, называемой силовой. Эта функция равна потенциальной энергии взятой с обратным знаком. , а второе — на первое с силой
, а второе — на первое с силой  . Как соотносятся силы? Третий закон Ньютона утверждает: сила действия равна по модулю и противоположна по направлению силе противодействия. Подчеркнём, что эти силы приложены к разным телам, а потому вовсе не компенсируются.
. Как соотносятся силы? Третий закон Ньютона утверждает: сила действия равна по модулю и противоположна по направлению силе противодействия. Подчеркнём, что эти силы приложены к разным телам, а потому вовсе не компенсируются.
 , действующей на тело, и, с другой стороны, некоторое значение потенциальной энергии
, действующей на тело, и, с другой стороны, некоторое значение потенциальной энергии  . Следовательно, между силой и потенциальной энергией должна существовать определенная связь.
. Следовательно, между силой и потенциальной энергией должна существовать определенная связь.
 , совершаемую силами поля при малом перемещении
, совершаемую силами поля при малом перемещении  тела, происходящем вдоль произвольно выбранного направления в пространстве, которое обозначим буквой
тела, происходящем вдоль произвольно выбранного направления в пространстве, которое обозначим буквой  . Эта работа равна
. Эта работа равна
 - проекция силы
- проекция силы  на отрезке оси
на отрезке оси 





 на
на  и
и  на
на  , найдем после несложных преобразований уравнение эллипса, у которого оси ориентированы произвольно относительно координатных осей:
, найдем после несложных преобразований уравнение эллипса, у которого оси ориентированы произвольно относительно координатных осей: 
 вырождаются в отрезки прямых, а при разности фаз
вырождаются в отрезки прямых, а при разности фаз  и равенстве амплитуд превращаются в окружность. Если периоды обоих колебаний неточно совпадают, то разность фаз всё время меняется, вследствие чего эллипс всё время деформируется. При существенно различных периодах фигуры Лиссажу не наблюдаются. Однако, если периоды относятся как целые числа, то через промежуток времени, равный наименьшему кратному обоих периодов, движущаяся точка снова возвращается в то же положение — получаются фигуры Лиссажу более сложной формы. Фигуры Лиссажу вписываются в прямоугольник, центр которого совпадает с началом координат, а стороны параллельны осям координат и расположены по обе стороны от них на расстояниях, равных амплитудам колебаний.
и равенстве амплитуд превращаются в окружность. Если периоды обоих колебаний неточно совпадают, то разность фаз всё время меняется, вследствие чего эллипс всё время деформируется. При существенно различных периодах фигуры Лиссажу не наблюдаются. Однако, если периоды относятся как целые числа, то через промежуток времени, равный наименьшему кратному обоих периодов, движущаяся точка снова возвращается в то же положение — получаются фигуры Лиссажу более сложной формы. Фигуры Лиссажу вписываются в прямоугольник, центр которого совпадает с началом координат, а стороны параллельны осям координат и расположены по обе стороны от них на расстояниях, равных амплитудам колебаний.

 ,
,  . Следовательно сила равна градиенту потенциальной энергии, взятого с обратным знаком
. Следовательно сила равна градиенту потенциальной энергии, взятого с обратным знаком