
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Необходимое программное и аппаратное обеспечение
1. Персональные компьютеры типа IBM Pentium III и выше с тактовой частотой задающего генератора не менее 800 МГц и оперативной памятью не менее 128 Мб. Операционная система – Windows 2000 и выше. 2. Программный комплекс WinMachine 8.3 АРМ Slider. 3. Система трехмерного твердотельного моделирования деталей SolidWorks 2005 и выше. 4. Программа кинематического и динамического анализа механизмов COSMOSMotion 2005 и выше. 4. Порядок выполнения задания 1. С помощью генератора индивидуальных заданий (см. табл. 2.1) выберите исходные данные для анализа кривошипно-шатунного механизма, показанного на рис. 2.1. Выбор осуществляется по буквам в фамилии студента. Таблица 2.1
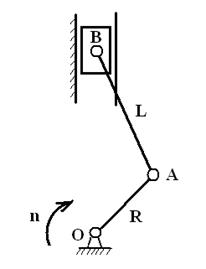
Рис. 2.1. Схема кривошипно-шатунного механизма Из табл. 2.1 выбираются следующие исходные данные: n, об/мин – частота вращения ведущего звена в начальный момент времени to = 0 при положении ползуна в верхней мертвой точке (в самом верхнем положении); e, 1/с2 – угловое ускорение ведущего звена. Угловое ускорение считать постоянным в процессе моделирования механизма; R, м – длина ведущего звена (кривошипа); L, м – длина ведомого звена (шатуна); j, град. – угол поворота ведущего звена, при котором необходимо построить план положения, скоростей и ускорений характерных точек механизма. Например, для студента Иванов будут выбраны следующие исходные данные: n=900 об/мин; e=120 с-2; R=0, 12 м; L=0, 4 м; j = 2400. Содержание задания: Смоделировать кинематику заданного кривошипно-шатунного механизма. Моделирование провести для полного оборота ведущего звена с угловым шагом 100 (всего 37 расчетных точек). Определить мгновенные скорости и ускорения точек А и В (см. рис. 2.1) кривошипно-шатунного механизма. Ознакомиться с программным модулем WinMachine 8.3 АРМ Slider или COSMOSMotion и их функциональными возможностями. Собрать схему КШМ в одном из этих модулей и провести моделирование. 2. Изучите теорию по кинематике рычажных механизмов [4]. 3. Определите начальные параметры ведущего звена: а) угловую скорость ведущего звена по формуле
Такую угловую скорость имеет ведущее звено в верхней мертвой точке в момент времени t0=0. б) Угловое ускорение ведущего звена в примере составляет e=120 с-2. 4. Определите начальные параметры точки А: а) положение точки А определите по формуле
Для начального положения механизма угол j0=00; б) линейную скорость точки А определите по формуле
в) центростремительное ускорение точки А определите по формуле
5. Определите начальные параметры точки В: а) положение точки В определите по формуле
б) линейную скорость точки В определите по формуле
в) ускорение точки В определите по формуле
6. Проведите подготовку к определению параметров в новой расчетной точке по следующей схеме: а) определите угол поворота ведущего звена по формуле
б) определите время прохождения ведущего звена от предыдущего положение в последующее по формуле
в) определите угловую скорость в новом положении ведущего звена по формуле
7. Определите параметры точек А и В в новом положении ведущего звена в соответствии с пп. 4 и 5. 8. Проведите расчет механизма с угловым шагом ведущего звена в 100 до конечного положения звена, соответствующего jк = 3600. 9. Постройте графики перемещения, скорости и ускорения точек А и B. В масштабе постройте план положения, план скорости и план ускорения при положении механизма в соответствии с заданным углом j. 10. Ознакомьтесь с программными продуктами WinMachine 8.3 АРМ Slider и COSMOSMotion 2005 [5, 6, 7], интегрированном в SolidWorks 2005. 11. Соберите расчетную схему в одном из программных продуктов, перечисленных в п. 10. 12. Проведите моделирование механизма и сравните с полученными расчетными значения. 13. Результаты расчета и моделирования оформите в виде отчета и защитите у преподавателя. Защита практической работы заключается в ответе студента на вопросы для контроля и дополнительные вопросы преподавателя. Вопросы для контроля 1. Как определяется положение точек механизма, двигающихся линейно и по окружности? 2. Как определяется скорость точек механизма, двигающихся линейно и по окружности? 3. Как определяется ускорение точек механизма, двигающихся линейно и по окружности? |
Последнее изменение этой страницы: 2017-03-15; Просмотров: 199; Нарушение авторского права страницы
 c-1.
c-1. м.
м. м/с;
м/с;  м/с2.
м/с2. м;
м; 
 м/с;
м/с;  м/с2.
м/с2. ;
;  с;
с;  с-1.
с-1.