
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Определение траектории точек тела
Рассмотрим точку М тела, положение которой в сечении S определяется расстоянием АМ от полюса А и углом
Равенства (3.25) определяют закон движения точки М в плоскости Оху, дают одновременно уравнение траектории этой точки в параметрическом виде. Уравнение траектории в обычном виде можно получить из (3.25) решив Рис. 3.16 их совместно, исключив из системы уравнений время t. 3.4.5. Определение скоростей точек тела Угловую скорость и угловое ускорение при плоском движении твердого тела можно представить в виде векторов, расположенных вдоль подвижной оси, перпендикулярной плоскости движения и проходящей через выбранный полюс (рис. 3.17). Вектор угловой скорости
При ускоренном вращении вектор углового ускорения Рис. 3.17 Его модуль равен
Перейдем теперь к изучению движения отдельных точек тела, то есть к изучению их траекторий, скоростей и ускорений. Дифференцированием по времени уравнений плоскопараллельного движения (3.24) определяются только скорость полюса А и угловая скорость тела:
Чтобы при помощи этих уравнений определить скорость любой точки плоской фигуры, рассмотрим движение ее произвольной точки В (рис. 3.18), положение которой в каждый момент времени по отношению к неподвижной системе отсчета Oxyz определяется радиус-вектором
Рис. 3.18 скоростью ω . Взяв производную по времени от последнего равенства, получим
В этом выражении
В соответствии с правилом векторного произведения вектор
где
Таким образом, мы доказали теорему о сложении скоростей: скорость любой точки тела при его Рис. 3.19 плоскопараллельном движении равна векторной сумме скорости полюса и скорости данной точки при ее вращении вместе с телом вокруг полюса. Направление и величина
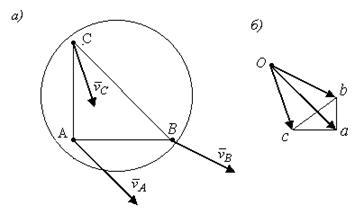
Рис. 3.20 Следствие 1. Проекции скоростей двух точек на прямую, соединяющую эти точки равны друг другу. Докажем это. Рассмотрим какие-нибудь две точки А и М твердого тела его в ППД (рис. 3.20, а). Принимая точку А за полюс и используя теорему о сложении скоростей (3.30), запишем: Следствие 2. Концы векторов скоростей точек неизменяемого отрезка лежат на одной прямой и делят эту прямую на части, пропорциональные расстояниям между соответствующими точками отрезка (рис. 3.20, б, в). Примем без доказательства (см. [1.-5]). План скоростей и его свойства Скорости точек тела можно определить графически, построением плана скоростей. Планом скоростей называется диаграмма, на которой от некоторого центра О отложены векторы скоростей всех точек тела. Пусть известны Точка О, из которой исходит пучок абсолютных скоростей, называется полюсом плана скоростей. Установим свойства и правила построения плана скоростей. По теореме о сложении скоростей (3.30) и (3.31) имеем:
Рис. 3.21 Но из треугольника аОb имеем,
или Сравнивая равенства (а) и (б) устанавливаем, что Тогда по формулам (3.31) имеем:
Откуда
Таким образом: · Каждый из отрезков, соединяющих вершины плана скоростей, геометрически равен вращательной скорости соответствующей точки фигуры вокруг другой точки как вокруг полюса и по модулю пропорциональны этим отрезкам · Отрезки, соединяющие концы векторов на плане скоростей, перпендикулярны отрезкам, соединяющим соответствующие точки тела, и по модулю пропорциональны этим отрезкам · Фигуры, обозначенные на плане скоростей и в сечении (S) тела одинаковыми буквами будут при этом подобны и повернуты относительно другой на 90˚. План скоростей плоского механизма строится как совокупность планов скоростей отдельных его звеньев, причем все векторы скоростей откладываются от общего полюса О в одном масштабе. Планом скоростей механизма называют графическое построение, представляющее собой плоский пучок, лучи которого изображают абсолютные скорости точек звена, а отрезки, соединяющие концы лучей, изображают относительные скорости соответствующих точек в данном положении звена. Отметим основные свойства плана скоростей механизма: 1. векторы абсолютных скоростей точек выходят из полюса плана скоростей; 2. векторы относительных скоростей точек одного и того же звена изображаются отрезками, соединяющими концы векторов абсолютных скоростей; 3. отрезки прямых линий (треугольники или многоугольники), соединяющие точки одного звена на плане механизма, и отрезки прямых линий, соединяющих концы векторов скоростей этих точек на плане скоростей, образуют подобные и сходственно расположенные фигуры; 4. фигура на плане скоростей повернута относительно подобной фигуры механизма на 90° по направлению его угловой скорости; 5. порядок букв при обходе в одном направлении контуров неизменяемой фигуры и ее плана скоростей одинаков. При этом обход надо начинать с одной и той же буквы. Эти свойства дают возможность определить скорость любой точки звена, если известны скорости двух точек этого звена. Рассмотрим пример построения плана скоростей.
Рис. 3.22 Решение: 1) Выбрав масштаб длин (например: в 1 см на рисунке изображено 0, 1 м размера звена), изображаем механизм в данном положении (рис. 3.22, а). 2) Определение скорости 3) Определение скорости
Так как АВ = ВС, то откладывая на продолжении аb отрезок bс = аb, находим точку с. Соединив точки О и с, получим вектор 4) Определение скорости |
Последнее изменение этой страницы: 2019-04-09; Просмотров: 338; Нарушение авторского права страницы
 (рис. 3.16). Если движение тела задано уравнениями (3.24), то координаты х и у точки М в осях Охуz будут:
(рис. 3.16). Если движение тела задано уравнениями (3.24), то координаты х и у точки М в осях Охуz будут:  , (3.25)
, (3.25) где ХА, YА, φ – известные по уравнениям (3.24) функции времени t.
где ХА, YА, φ – известные по уравнениям (3.24) функции времени t. направлен в ту сторону, откуда мы видим вращение тела, происходящим против хода часовой стрелки. Его модуль равен
направлен в ту сторону, откуда мы видим вращение тела, происходящим против хода часовой стрелки. Его модуль равен 

 . (3.26)
. (3.26) направлен в ту же сторону, что и вектор угловой скорости
направлен в ту же сторону, что и вектор угловой скорости  . (3.27)
. (3.27) ,
,  ,
,  ,
,  . (3.28)
. (3.28)  , (3.29)
, (3.29) где
где  - радиус-вектор полюса А, а
- радиус-вектор полюса А, а  - радиус-вектор точки В,
- радиус-вектор точки В,  - радиус-вектор точки В относительно полюса А. Вектор
- радиус-вектор точки В относительно полюса А. Вектор  .
. - скорость полюса А. Производная вектора постоянного модуля по времени определяется по формуле Эйлера и обозначается как
- скорость полюса А. Производная вектора постоянного модуля по времени определяется по формуле Эйлера и обозначается как  :
:  .
. . Вектор
. Вектор 
 , (3.30)
, (3.30) ,
,  . (3.31)
. (3.31) находится по правилу параллелограмма (рис. 3.19). Для этого по формулам (3.28) находят скорость полюса
находится по правилу параллелограмма (рис. 3.19). Для этого по формулам (3.28) находят скорость полюса  и угловую скорость тела ω . Затем по формулам (3.31) определяют скорость
и угловую скорость тела ω . Затем по формулам (3.31) определяют скорость  .
. 
 . Проектируя это уравнение на ось (рис. 3.20, а), получим
. Проектируя это уравнение на ось (рис. 3.20, а), получим  , так как
, так как  . Этот результат позволяет легко находить скорость точки тела, если известны направление движения этой точки и величина и направление скорости какой-нибудь точки того же тела.
. Этот результат позволяет легко находить скорость точки тела, если известны направление движения этой точки и величина и направление скорости какой-нибудь точки того же тела.  - скорости точек А, В, С тела (рис. 3.21, а). Тогда соответствующий план скоростей получим, отложив от некоторого центра О (рис. 3.21, б) в выбранном масштабе отрезки
- скорости точек А, В, С тела (рис. 3.21, а). Тогда соответствующий план скоростей получим, отложив от некоторого центра О (рис. 3.21, б) в выбранном масштабе отрезки  ,
,  ,
,  .
.  где
где 
 . (б)
. (б)  ; аналогично найдем
; аналогично найдем  ;
;  и т.д.
и т.д. и
и  ,
,  и
и  ,
,  и
и  .
.  (3.32)
(3.32) .
. ,
,  .
.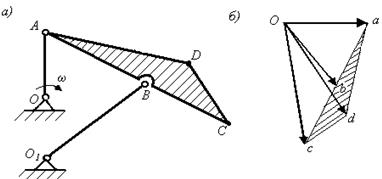 Пример: Построить план скоростей механизма (рис. 3.22, а) для положения, изображенного на чертеже, если скорость
Пример: Построить план скоростей механизма (рис. 3.22, а) для положения, изображенного на чертеже, если скорость  конца кривошипа ОА известна. Кривошип О1В соединен шарниром с серединой шатуна АС.
конца кривошипа ОА известна. Кривошип О1В соединен шарниром с серединой шатуна АС. (скорость точки
(скорость точки  ), а из точки а прямую
), а из точки а прямую  до пересечения с линией Оb. Тогда согласно (б) точка b и даст конец вектора
до пересечения с линией Оb. Тогда согласно (б) точка b и даст конец вектора  . Точка С механизма лежит на прямой АВС. Следовательно, по свойству подобия точка с на плане скоростей должна лежать на прямой аbс. При этом согласно (3.32)
. Точка С механизма лежит на прямой АВС. Следовательно, по свойству подобия точка с на плане скоростей должна лежать на прямой аbс. При этом согласно (3.32) .
. . Из точки а проводим прямую перпендикулярную АD, а из точки с – прямую перпендикулярную СD. Пересечение этих перпендикуляров дает, согласно (б) точку d. Соединяя точки О и d, находим вектор
. Из точки а проводим прямую перпендикулярную АD, а из точки с – прямую перпендикулярную СD. Пересечение этих перпендикуляров дает, согласно (б) точку d. Соединяя точки О и d, находим вектор  .
.