
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Теорема об ускорениях точек плоской фигуры и ее следствия
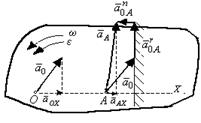
Ускорения точек плоской фигуры определяются следующей теоремой: ускорение любой точки плоской фигуры равно геометрической сумме ускорения полюса и ускорения этой точки во вращательном движении вокруг полюса. Для установления этой зависимости допустим, что известно ускорение Пусть в данный момент времени фигура вращается ускоренно в сторону, противоположную движению часовой стрелки (рис. 3.29). Определим ускорение точки А фигуры, приняв точку В за полюс. Воспользуемся теоремой о сложении скоростей фигуры, приняв точку В за полюс. На основании (3.30) имеем
Ускорение точки А найдем как векторную производную по времени от скорости этой точки:
где Тогда
Здесь
При этом для
или
Здесь ω и ε – угловая скорость и угловое ускорение тела, а μ – угол между направлением
Рис. 3.29 Ускорение точки А плоской фигуры определяется путем построения многоугольника ускорений. На рис. 3.29 построен прямоугольник, определяющий ускорение точки А в ее вращательном движении вокруг полюса В:
Рис 3.30 Следствие 1. Проекция ускорения любой точки плоской фигуры на ось, проведенную из произвольного полюса через эту точку, не может быть больше проекции ускорения полюса на эту же ось. Доказательство. Ускорение точки А плоской фигуры определяется по формуле (3.37):
Сложим векторы
Проекция нормального ускорения
что и требовалось доказать. Следствие 2. Концы векторов ускорений точек неизменяемого отрезка лежат на одной прямой и делят эту прямую на части, пропорциональные расстояниям между этими точками. (Примем без доказательства см. [1-5]).
Рис. 3.31 Пользуясь масштабом, находим их модули и по чертежу определяем их направления. Если полюс движется непрямолинейно, то его ускорение также слагается из касательного и нормального ускорения, и тогда Формулами (3.38) и (3.39) пользуются при решении задач, вычисляя векторы, стоящие в правой части равенства, а затем определяя их геометрическую сумму или произведя соответствующее графическое построение. Вектор |
Последнее изменение этой страницы: 2019-04-09; Просмотров: 1380; Нарушение авторского права страницы
 некоторой точки В плоской фигуры и алгебраические величины угловой скорости ω , углового ускорения ε фигуры, известны так же в данный момент направление вращения плоской фигуры и характер ее вращения (ускоренное или замедленное).
некоторой точки В плоской фигуры и алгебраические величины угловой скорости ω , углового ускорения ε фигуры, известны так же в данный момент направление вращения плоской фигуры и характер ее вращения (ускоренное или замедленное). .
. ,
,  ,
,  ,
,  . (3.36)
. (3.36)  - вращательное (касательное) ускорение точки А вокруг точки В направлено перпендикулярно АВ соответственно направлению
- вращательное (касательное) ускорение точки А вокруг точки В направлено перпендикулярно АВ соответственно направлению  .
. - центростремительное (нормальное) ускорение точки А вокруг точки В направлено к полюсу B по АВ. Но геометрическая сумма касательного и нормального ускорений является полным ускорением точки А во вращении вокруг полюса В, поэтому
- центростремительное (нормальное) ускорение точки А вокруг точки В направлено к полюсу B по АВ. Но геометрическая сумма касательного и нормального ускорений является полным ускорением точки А во вращении вокруг полюса В, поэтому . (3.37)
. (3.37) ускорения точки А во вращательном движении вокруг полюса В по формулам (3.12-3.14) (см. п.3.3) будет
ускорения точки А во вращательном движении вокруг полюса В по формулам (3.12-3.14) (см. п.3.3) будет ,
,  ;
; 
 ;
;  . (3.38)
. (3.38)  и отрезком АВ.
и отрезком АВ.
 , а затем находится ускорение
, а затем находится ускорение  , как диагональ параллелограмма ускорений, сторонами которого служат ускорение полюса
, как диагональ параллелограмма ускорений, сторонами которого служат ускорение полюса  и ускорение точки во вращательном движении вокруг полюса
и ускорение точки во вращательном движении вокруг полюса  .
.
 .
.
 и
и  по правилу многоугольника, тогда
по правилу многоугольника, тогда  будет замыкающей стороной многоугольника ускорений (рис. 3.30). Проведем из полюса О через точку А ось Х и спроектируем все векторы на эту ось:
будет замыкающей стороной многоугольника ускорений (рис. 3.30). Проведем из полюса О через точку А ось Х и спроектируем все векторы на эту ось:  .
.  на ось Х всегда отрицательна, так как это ускорение направлено от точки А к полюсу О, то есть противоположно направлению оси Х:
на ось Х всегда отрицательна, так как это ускорение направлено от точки А к полюсу О, то есть противоположно направлению оси Х:  . Проекция касательной составляющей ускорения на ось Х равна нулю, так как это ускорение всегда перпендикулярно оси Х:
. Проекция касательной составляющей ускорения на ось Х равна нулю, так как это ускорение всегда перпендикулярно оси Х:  . На этом основании находим, что
. На этом основании находим, что  , следовательно
, следовательно ,
, 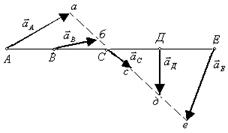 Этим следствием удобно пользоваться при решении задач графическим способом. Допустим, что требуется определить ускорения точек Д, С и Е, делящих отрезок на четыре равные части (рис. 3.31). Соединяем концы ускорений точек А и Е, отложенных в масштабе, отрезком прямой ае и делим этот отрезок точками б, с и д на четыре равные части. Соединяя точки В и б, С и с, Д и д, получаем ускорения этих точек
Этим следствием удобно пользоваться при решении задач графическим способом. Допустим, что требуется определить ускорения точек Д, С и Е, делящих отрезок на четыре равные части (рис. 3.31). Соединяем концы ускорений точек А и Е, отложенных в масштабе, отрезком прямой ае и делим этот отрезок точками б, с и д на четыре равные части. Соединяя точки В и б, С и с, Д и д, получаем ускорения этих точек  и
и  .
. . (3.39)
. (3.39) , а затем по правилу параллелограмма найти ускорение точки А;
, а затем по правилу параллелограмма найти ускорение точки А;  . Однако, вычисление
. Однако, вычисление  с помощью параллелограмма усложняет расчет, так как сначала нужно определить угол
с помощью параллелограмма усложняет расчет, так как сначала нужно определить угол  , а затем угол между векторами
, а затем угол между векторами  . Поэтому при решении задач удобнее вектор
. Поэтому при решении задач удобнее вектор  заменить его и составляющими: нормального ускорения
заменить его и составляющими: нормального ускорения  , направленного по АВ к полюсу В, и касательного ускорения
, направленного по АВ к полюсу В, и касательного ускорения  , направленного перпендикулярно АВ в сторону вращения, если движение ускоренное и против, если движение замедленное.
, направленного перпендикулярно АВ в сторону вращения, если движение ускоренное и против, если движение замедленное.