
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Мгновенный центр ускорений
При непоступательном движении твердого тела в его сечении ( S) в каждый момент времени имеется точка Q, ускорение которой равно нулю. Эта точка называется мгновенным центром ускорений (МЦУ). Определяется положение центра Q, если известно ускорение 1) вычисляем величину угла 2) от точки А под углом 3) откладываем вдоль линии АЕ отрезок AQ, равный
Построенная таким путем точка Q и будет мгновенным центром ускорений (МЦУ). В самом деле, по формулам (3.37) и (3.38) заключаем, что · ускорение любой точки тела равно ее ускорению во вращательном движении вокруг МЦУ, а
· при этом
то есть ускорения точек тела пропорциональны их расстояниям до МЦУ (рис. 3.33) · МЦУ и МЦС – являются различными точками сечения (S) фигуры. Например, колесо катится без скольжения по прямолинейному пути (рис. 3.34), причем скорость его центра постоянна (
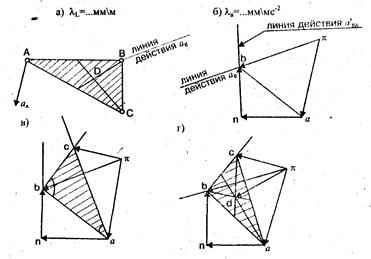
Решение. Так как точка С, как показано выше, в данном случае является мгновенным центром ускорений – МЦУ, а мгновенный центр скоростей Рис. 3.34 находится в точке Р, То для колеса По формуле (3.41) находим План ускорений и его свойства Планом ускорений звена плоского механизма называется графическое построение, представляющее собой плоский пучок, лучи которого изображают абсолютные ускорения точек звена, а отрезки, соединяющие концы лучей, изображают относительные ускорения соответствующих точек в данном положении звена. Совокупность планов ускорений звеньев с одним общим полюсом и одним масштабом называется планом ускорения механизма . Основные свойства плана ускорений: 1) векторы абсолютных ускорений точек фигуры выходят из полюса плана ускорений; 2) векторы относительных ускорений точек фигуры изображаются отрезками, соединяющими концы векторов абсолютных ускорений; 3) фигура на плане ускорений (отрезок, прямоугольник, многоугольник и др.), образуемая относительными ускорениями, подобна одноименной фигуре на движущемся неизменяемом теле и повернута относительно последнего на угол (180°-µ) по направлению углового ускорения вращения тела; 4) порядок букв при обходе по контурам одноименных фигур, как на плане ускорений, так и на неизменяемой фигуре, одинаковый. При этом обход надо начинать от одной и той же буквы и производить в одном и том же направлении, как на плане ускорений, так и неизменяемой фигуре. Рассмотрим пример построения плана ускорений. Определим ускорения точек В, С и D фигуры АВС (рис. 3.35, а), если известны ускорение Построим фигуру АВС (рис. 3.35, а)
То есть, вектор ускорения Здесь и далее вектор, известный по величине и направлению, подчеркнут двумя линиями, а вектор, известный по величине или направлению, подчеркнут одной линией, под которой указано это направление. Решим графически уравнение (3.43) с помощью плана ускорений при условии, что линия действия вектора ускорения К концу п этого вектора прикладываем вектор касательного ускорения Ускорение точки С определим с помощью свойства подобия фигур тела и плана ускорений. Для этого на стороне аb плана ускорений строим треугольник аbс, подобный треугольнику АВС, и в таком же положении, чтобы обход по контурам этих треугольников был в одном направлении (рис. 3.35, в). Для построения треугольника аbс, подобного АВС, использовано равенство углов. Соединив полюс π с точкой с, получим вектор Определим ускорение точки D, с помощью свойства подобия. Точка D лежит на пересечении медиан треугольника АВС (рис. 3.35, а). Следовательно, в одноименном треугольнике abc плана ускорений точка d лежит также на пересечении медиан последнего. Проведем медианы треугольника аbc (рис. 3.35, г). Соединим полюс π с точкой d пересечения медиан, получим вектор С помощью вектора
где π b – отрезок, взятый с плана ускорений, λ a – масштаб ускорений.
Рис. 3.35. Определение ускорений точек фигуры АВС а) фигура АВС; б) определение ускорения точки В; в) определение ускорения точки С; г) определение ускорения точки Д При определении направления углового ускорения, вектор Пример. Определить ускорения точек А, В, С, D и угловые ускорения звеньев механизма для положения, изображенного на чертеже (рис. 3.36, а), если кривошип ОА вращается с постоянной угловой скоростью ω 1. Кривошип О1В соединен шарниром с серединой шатуна АС. Решение: 1) Выбрав масштаб длин λ L=…мм/м. (например, если 1 мм чертежа фигуры содержит 0, 1 м длины реальной фигуры, то λ L=10 мм/м), изображаем механизм в данном положении (рис. 3.36, а). 2) Определение скоростей точек А, В, С и D. Определим скорость точки А по величине и направлению. Так как кривошип вращается вокруг неподвижной оси, проходящей через неподвижную точку О, то модуль скорости точки А равен vА=ω 1ОА и направлен вектор скорости перпендикулярно ОА в сторону направления угловой скорости ω 1. Построим план скоростей (см. пример п. 3.4.6) в выбранном масштабе по скорости λ v=…мм/мс-1 (например, если один мм плана скоростей содержит скорость 0, 5 м/с, то λ v=2мм/мс-1). Измерим на плане скоростей (рис. 3.36, б) отрезки Оb, Ос, Оd, аb и определим модули скоростей точек В, С, D, угловую скорость ω 2 тела АВСD и угловую скорость ω 3 звена О1В по формулам:
3) Определение 4. Определение
Рис. 3.36 С другой стороны точка В так же принадлежит звену О1В, которое совершает вращательное движение вокруг неподвижной оси, проходящей через точку О1, а ускорение точки В соответственно будет равно
Приравнивая правые части полученных выражений, имеем
Выразим это равенство графически. К вектору Теперь от точки π откладываем вектор Одновременно из построения следует, что 1) Определение угловых ускорений звеньев. Измерив длины отрезков пb и κ b найдем угловые ускорения звеньев по формулам
Из планов скоростей и ускорений видим, что векторы скорости 2) Определение
Отложим от точки b отрезок 3) Определение
Вопросы для повторения 1. Ускорение какой точки плоской фигуры можно найти по уравнениям ее движения? 2. Как определяется ускорение любой точки плоской фигуры? 3. Чему равны и как направлены составляющие 4. Какие существуют методы решения уравнения 5. Как направлено ускорение точки В, если угловая скорость постоянна, а ускорение полюса А направлено по прямой АВ? 6. Как направлено ускорение точки В, если плоская фигура совершает мгновенно поступательное движение, а ускорение точки А, перпендикулярно прямой АВ? 7. Что можно сказать об угловой скорости плоской фигуры, если ускорение точки А равно нулю, а ускорение точки В направлено вдоль прямой АВ? 3.5.* Сферическое движение твердого тела Рассмотрим движение твердого тела, одна из точек которого остается неподвижной. При таком движении все другие точки тела движутся по сферическим поверхностям, центры которых совпадают с неподвижной точкой. Такое движение твердого тела называют сферическим. Для определения положения тела в каждый момент времени проведем через его неподвижную точку две системы координат: неподвижную Oхуz с началом в точке О и подвижную Оξ η ζ , жестко связанную с телом и началом в той же точке О (рис. 3.37). OJ – линия пересечения подвижной и неподвижной систем координат, называется линией узлов.
При сферическом движении тела углы φ, ψ, θ непрерывно меняются во времени, то есть являются функциями времени Рис. 3.37 Эти равенства называются уравнениями или законом движения тела вокруг неподвижной точки (сферического движения твердого тела). Положения твердого тела в пространстве определяется положением 3-х его точек не лежащих на одной прямой. Действительно 2 точки определяют некоторую ось, а третья точка – положение тела по отношению к этой оси. Следовательно, положение твердого тела можно определить положением 2-х его точек не лежащих на одной прямой с неподвижной точкой. С помощью теоремы Даламбера - Эйлера можно представить себе картину движения тела. Примем ее без доказательства. Твердое тело, имеющее одну неподвижную точку можно переместить из одного положения в любое другое поворотом вокруг некоторой оси, проходящей через неподвижную точку. Следовательно, в каждый момент времени скорости из точек одной из прямых тела равны нулю, то его движение в каждый момент времени можно рассматривать как вращение вокруг этой прямой, проходящей через неподвижную точку и называемую мгновенной осью вращения. Положение мгновенной оси вращения с течением времени непрерывно меняется как в теле, так и в неподвижном пространстве. Угловая скорость этого вращения называется мгновенной угловой скоростью. Ее вектор откладывается вдоль мгновенной оси вращения в ту сторону, откуда мы видим вращение, происходящим против хода часовой стрелки.
где Рис. 3.38 вектор рассматриваемой точки М относительно неподвижной точки О тела (рис. 3.38). Модуль скорости равен
где h – расстояние от точки М тела до мгновенной оси вращения ОР. Из-за непрерывного изменения положения оси ОР это расстояние будет переменным. 3.6.* Общий случай движения свободного твердого тела Чтобы в общем случае определить положение свободного твердого тела в пространстве относительно неподвижной системы координат Охуz, свяжем с произвольной точкой А тела, в дальнейшем называемой полюсом, подвижную систему координат Ах1у1z1, которая перемещается поступательно и оси которой остаются параллельными осям неподвижной системы координат Охуz. Положение подвижной системы относительно неподвижной определяется положением ее начала, полюса А, то есть тремя координатами: хА, уА, zА. Относительно подвижной системы Ах1у1z1 тело совершает сферическое движение (в этой системе точка А неподвижна), и его относительное движение определяется тремя углами Эйлера. Таким образом, шесть равенств определяющих положение полюса А и положение тела относительно подвижной системы координат в каждый момент времени. Поэтому эти равенства называются уравнениями движения свободного твердого тела . Если бы в процессе движения углы ψ, θ и φ оставались неизменными, то тело перемещалось бы поступательно в соответствии с тремя первыми уравнениями системы (3.47). Если бы полюс А тела оставался неподвижным, то тело двигалось бы вокруг неподвижной точки А согласно трем последним уравнениям системы (3.47). В действительности же в общем случае движения твердого тела меняется как положение полюса, так и углы Эйлера. Поэтому мы можем сказать, что в общем случае движение твердого тела в каждый момент времени слагается из поступательного движения, при котором все точки движутся со скоростями Для радиуса вектора произвольной точки В относительно неподвижной точки О в каждый момент времени справедлива зависимость (рис. 3.39)
Продифференцировав это равенство по времени, получим
Здесь Рис. 3.39 Таким образом, мы получили формулу, определяющую скорость произвольной точки В в общем случае движения твердого тела:
Примеры движения свободного твердого тела: брошенный камень, самолет, проделывающий фигуры высшего пилотажа, артиллерийский снаряд, и т.д. Сложное движение точки |
Последнее изменение этой страницы: 2019-04-09; Просмотров: 895; Нарушение авторского права страницы
 какой-нибудь точки тела и величины
какой-нибудь точки тела и величины  , следующим образом:
, следующим образом:  по формуле
по формуле  ,
,  . (3.40)
. (3.40) Рис. 3.32 Рис. 3.33
Рис. 3.32 Рис. 3.33 , (3.41)
, (3.41) , (3.42 )
, (3.42 ) ). Тогда мгновенный центр скоростей колеса находится в точке Р (
). Тогда мгновенный центр скоростей колеса находится в точке Р (  = 0) – в точке касания с землей. Мгновенный центр ускорений в этом случае, очевидно, находится в точке С, так как она движется равномерно и прямолинейно и
= 0) – в точке касания с землей. Мгновенный центр ускорений в этом случае, очевидно, находится в точке С, так как она движется равномерно и прямолинейно и  . Центры скоростей и ускорения совпадают тогда, когда тело вращается вокруг неподвижной оси.
. Центры скоростей и ускорения совпадают тогда, когда тело вращается вокруг неподвижной оси. Пример. Колесо катится по прямолинейному рельсу так, что скорость его центра постоянна
Пример. Колесо катится по прямолинейному рельсу так, что скорость его центра постоянна 
 . Следовательно, ускорения любой точки обода колеса (в том числе и точки Р) равны и направлены к центру С колеса, так как угол μ = 0. Но ускорение точки М не будет нормальным ускорением. Так как скорость точки М направлена перпендикулярно РМ, то касательная Мτ к траектории точки М направлена вдоль МD, а главная нормаль Мп – вдоль МР. Поэтому
. Следовательно, ускорения любой точки обода колеса (в том числе и точки Р) равны и направлены к центру С колеса, так как угол μ = 0. Но ускорение точки М не будет нормальным ускорением. Так как скорость точки М направлена перпендикулярно РМ, то касательная Мτ к траектории точки М направлена вдоль МD, а главная нормаль Мп – вдоль МР. Поэтому  .
. точки А и линия действия ускорения
точки А и линия действия ускорения  точки В.
точки В. в выбранном масштабе длин λ L. Определим ускорение точки В, проведя графическое решение уравнения, выражающего теорему о сложении ускорений точки тела, совершающего плоскопараллельное движение
в выбранном масштабе длин λ L. Определим ускорение точки В, проведя графическое решение уравнения, выражающего теорему о сложении ускорений точки тела, совершающего плоскопараллельное движение . (3.43)
. (3.43) , точки В фигуры, совершающей плоскопараллельное движение, равен геометрической сумме векторов: ускорения
, точки В фигуры, совершающей плоскопараллельное движение, равен геометрической сумме векторов: ускорения  от вращения точки В вместе с телом вокруг полюса А.
от вращения точки В вместе с телом вокруг полюса А. , изображающий ускорение
, изображающий ускорение  . К концу этого вектора (к точке а) согласно уравнению (3.43) прикладываем вектор, изображающий ускорение
. К концу этого вектора (к точке а) согласно уравнению (3.43) прикладываем вектор, изображающий ускорение  в том же масштабе. Модуль вектора равен
в том же масштабе. Модуль вектора равен  , а угловая скорость ω АВ, уже определена планом скоростей (см. пример п. 3.4.6).
, а угловая скорость ω АВ, уже определена планом скоростей (см. пример п. 3.4.6). . Так как модуль этого вектора не известен, то через точку п проводим только линию действия этого вектора (линию, перпендикулярную к АВ на фигуре АВС). А через полюс π проведем линию действия вектора
. Так как модуль этого вектора не известен, то через точку п проводим только линию действия этого вектора (линию, перпендикулярную к АВ на фигуре АВС). А через полюс π проведем линию действия вектора  и будет изображать ускорение
и будет изображать ускорение  по АВ от точки В к точке А.
по АВ от точки В к точке А.  , который и будет изображать ускорение
, который и будет изображать ускорение  точки С.
точки С. , который и будет изображать ускорение
, который и будет изображать ускорение  точки D.
точки D. можно определить значение и направление углового ускорения ε плоской фигуры
можно определить значение и направление углового ускорения ε плоской фигуры или
или  ,
, 
 , изображающий слагаемое
, изображающий слагаемое  в уравнении (3.43), мысленно перенесем с плана ускорений параллельно самому себе в точку В на плоской фигуре. Тогда видно, что угловое ускорение ε направлено против хода часовой стрелки при вращении фигуры вокруг полюса А.
в уравнении (3.43), мысленно перенесем с плана ускорений параллельно самому себе в точку В на плоской фигуре. Тогда видно, что угловое ускорение ε направлено против хода часовой стрелки при вращении фигуры вокруг полюса А. ,
,  ,
,  ,
,  ,
,  .
. . Так как кривошип ОА вращается с постоянной угловой скоростью ω 1, то ускорение
. Так как кривошип ОА вращается с постоянной угловой скоростью ω 1, то ускорение  = 0, а ускорение точки А будет равно только нормальной составляющей ускорения
= 0, а ускорение точки А будет равно только нормальной составляющей ускорения  . Определим величину ускорения точки А по формуле
. Определим величину ускорения точки А по формуле  . Выбрав масштаб ускорений λ а =…мм/мс-2 (например, 1 мм плана ускорений содержит 10 м/с 2, то λ а =0, 1 мм/мс-2), отложим в этом масштабе от некоторого центра π вектор
. Выбрав масштаб ускорений λ а =…мм/мс-2 (например, 1 мм плана ускорений содержит 10 м/с 2, то λ а =0, 1 мм/мс-2), отложим в этом масштабе от некоторого центра π вектор  , направленный по ОА от точки А.
, направленный по ОА от точки А.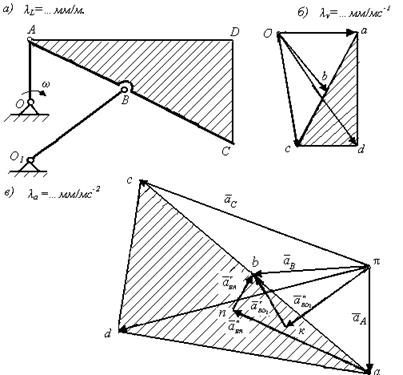
 .
. .
. =
=  .
. =
=  (
(  и где-то на ней должен лежать конец искомого вектора
и где-то на ней должен лежать конец искомого вектора  .
. =
=  (
(  . Конец вектора
. Конец вектора  . Измерив длину π b и учитывая масштаб, найдем в нашем случае, что
. Измерив длину π b и учитывая масштаб, найдем в нашем случае, что  .
. и
и  .
. и
и  .
. точки В и ускорения
точки В и ускорения  направлены в противоположные стороны. Следовательно, звено О1В движется замедленно. Сравнивая направления векторов скорости
направлены в противоположные стороны. Следовательно, звено О1В движется замедленно. Сравнивая направления векторов скорости  и ускорения
и ускорения  . Используя свойство подобия фигур АВС на механизме и авс плане ускорений определим положение точки с на плане ускорений из условия пропорциональности
. Используя свойство подобия фигур АВС на механизме и авс плане ускорений определим положение точки с на плане ускорений из условия пропорциональности .
. . Тогда, соединив точку с с центром плана ускорений π, получим ускорение
. Тогда, соединив точку с с центром плана ускорений π, получим ускорение  . Модуль ускорения точки С определим с учетом масштаба ускорения, измерив отрезок π с, получим
. Модуль ускорения точки С определим с учетом масштаба ускорения, измерив отрезок π с, получим  .
. . Используя свойство равенства углов подобных фигур, на плане ускорений построим фигуру аbсd подобную фигуре АВСD механизма. Соединив точку d с центром плана ускорений π , получим ускорение. Модуль ускорения точки D определим по формуле
. Используя свойство равенства углов подобных фигур, на плане ускорений построим фигуру аbсd подобную фигуре АВСD механизма. Соединив точку d с центром плана ускорений π , получим ускорение. Модуль ускорения точки D определим по формуле .
. и
и  в равенстве
в равенстве  =
=  +
+  ?
?  +
+  - называется углом прецессии;
- называется углом прецессии;  φ - угол собственного вращения;
φ - угол собственного вращения;  - угол нутации.
- угол нутации.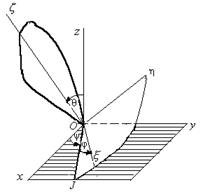 Углы φ, ψ, θ - называются углами Эйлера, эти названия заимствованы из астрономии.
Углы φ, ψ, θ - называются углами Эйлера, эти названия заимствованы из астрономии. . (3.44)
. (3.44) 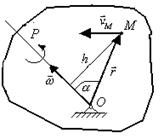 Скорости точек твердого тела, имеющего одну неподвижную точку, определяются формулой Эйлера
Скорости точек твердого тела, имеющего одну неподвижную точку, определяются формулой Эйлера  , (3.45)
, (3.45) - вектор мгновенной угловой скорости,
- вектор мгновенной угловой скорости,  - радиус-
- радиус- , (3.46)
, (3.46)




 (3.47)
(3.47) произвольно выбранного полюса А, и из вращения с мгновенной угловой скоростью
произвольно выбранного полюса А, и из вращения с мгновенной угловой скоростью  вокруг мгновенной оси вращения, проходящей через полюс А.
вокруг мгновенной оси вращения, проходящей через полюс А. ,
,  где
где  - радиус-вектор полюса А, а
- радиус-вектор полюса А, а  - постоянный по модулю радиус-вектор точки В относительно полюса А
- постоянный по модулю радиус-вектор точки В относительно полюса А .
. - скорость точки В,
- скорость точки В,  - скорость полюса А,
- скорость полюса А,  - скорость точки В тела при его вращении вокруг мгновенной оси.
- скорость точки В тела при его вращении вокруг мгновенной оси. . (3.48)
. (3.48)