|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Динамические характеристики датчиков.
Динамические св-тва датчика характеризуются целым рядом параметров. Дин. хар-ку датчика можно экспериментально получить как реакцию на скачок измеряемой вх. величины.
Т0-время прохождения зоны нечувствительности Тd-запаздывание Тр- время достижения первого максимума Тs-время установления Мр- перерегулирование Минимизируют следующие параметры: 1-время прохождения зоны нечувствительности- время между началом изм. Физ. Величины и моментом начала измерения вых. сигнала. 2-запаздывание-время через которое показание датчика первый раз достигают 50% установившегося значения 3- время нарастания - время за которое вых. сигнал увеличивается от 10 до 90% установившегося значения. 4- время достижения первого максимума вых. сигнала(перерегулирование) 5- время переходного процесса- начиная с которого отклонение выхода датчика от установившегося значения меньше заданной ±5% 6- относительное перерегулирование- разность между макс. и установившемся значениями 7- статическая ошибка- отклонение вых. величины датчика от истинного значения Статические хар-ки датчиков СХД показывают на сколько корректно выхода датчика отражает измеряемую величину спустя некоторое время после её измерения когда вых. сигнал установился на новое значение. Важные СХД: 1 чувствительность- определяется как отношение вых. сигнала к единичной вх. величине. 2 разрешение- наименьшее изменение измеряемой величины которая может быть зафиксировано и показано датчиком. 3 линейность- определяется исходя из градуировочной кривой датчика, она показывает зависимость вых. сигнала от вх.. 4 статическое усилие( усилие по постоянному току) – это коэффициент усиления датчика на очень низких частотах. 5 дрейф нуля- определяется как отклонение показаний датчика когда изм. Величина остаётся постоянной в течение длительного времени. Дрейф датчика вызывается не стабильностью усилителя изменением окружающих условий. 6 рабочий диапазон- определяется допустимым верхним и нижнем пределами значений входной величины или уровня выходного сигнала. 7 повторяемость- характеризуется как отклонение между несколькими последними измерениями при заданном значении изм. величины в одинаковых условиях. 8 воспроизводимость- как 7, но требует большего интервала между измерениями, между проверками на воспроизводимость датчик должен использоваться по назначению и может быть подвергнут калибровке.
Бинарные и цифровые датчики В СУ последовательностью событий в основном применяются сигналы типа вкл\выкл., вырабатываемые бинарным датчиком. Бинарные датчики используются для определения положения при мех. Перемещениях для подсчета элементов в дискретных потоках для контроля достижения предельных значений уровня или давления или крайних положений подвижных частей. Бинарные и цифровые датчики бывают как простыми, состоящими только из выключателя, так и сложными. Некоторые цифровые датчики в действительности представляют собой полнофункциональный микрокомпьютер, встроенный в автономное устройство и вырабатывает либо сигналы типа вкл\выкл, либо кодир. цифровые данные.
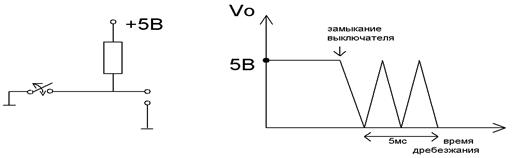
Датчики положения В качестве датчиков положения ДП в течение долгого времени используются выключатели. Они состоят из электрических контактов, которые механически размыкаются или замыкаются когда какая-либо переменная (положение, уровень) достигает определенного значения. Концевые выключатели различных типов являются важной частью многих СУ, надежность которых существенно зависит именно от них. Они располагаются там, где происходит действие и часто подвергаются большим механическим нагрузкам и токам. Простейшим выключателем является механически разомкнутый 1-рлюсный выключатель изобр. на рис. Простое согласование сигналов можно обеспечить с помощью нагрузочного резистора. Когда выключатель разомкнут с резистора снимается напряжение +5В, воспринимаемое ТТ-логикой на входе компьютера как одно из логических состояний. Если контакт замкнут – выходной сигнал равен потенциалу земли, что воспринимается как другое логическое состояние. Замыкание мех. выключателя вызывает проблемы, поскольку контакты вибрируют несколько миллисекунд прежде чем замкнуться. Когда важно зафиксировать только первое касание как в случае концевого выключателя, принимать во внимание последующие замыкания и размыкания контактов из-за дребезжания нет необходимости. Применение цепи, обеспечивающее небольшое запаздывание выходного сигнала является одним из способов преодоления эффекта дребезжания контактов.
Бороться с дребезжанием контактов в 1-полюсных 2-х позиционных выключателях можно с помощью спец. схем. Подвижный контакт должен быть заземлен, когда он касается контакта, присоединенного к источнику, напряжения последнего снижается. Подключенная электронная схема должна уловить логическое состояние, соответствующее 1-ому качанию контактов и игнорировать последующее дребезжание. |
Последнее изменение этой страницы: 2019-04-10; Просмотров: 356; Нарушение авторского права страницы