
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Существующие типы конвейеров
Пластинчатые конвейеры применяют для перемещения штучных и навалочных грузов, крупнокускового камня, а также на складах. Пластинчатый конвейер включает тяговый рабочий орган в виде пластинчато-роликовой цепи, приводимой в движение звездочками за счет осей с колесами, перекатывающимися по рельсам. К тяговому органу неподвижно укреплены грузонесущие пластины. Скребковые конвейеры работают по принципу волочения насыпного, кускового или штучного груза по неподвижному желобу, в трубе при помощи скребков, смонтированных па тросе или цепи. На рисунке 32 представлена схема (фрагмент) скребкового конвейера: 1 - скребок; 2 -цепь (канат) тяговая; 3 - каток (ролик) несущий; 4 - направляющая; 5 - днище желоба.
v - скорость движения, м/с; р - плотность груза, т/м3;
Подвесные конвейеры применяют на складах и объектах бытового обслуживания, домостроительных комбинатах и др. Основным элементом подвесного конвейера являются подвесные пути, обычно прикрепляемые к потолку или к балкам, укрепленным в стенах. По этим путям с помощью тяговой цепи или каната перемещаются каретки. Цепь приводится в. движение звездочкой. На каретках подвешены крюки или захваты для крепления грузов. Основными достоинствами этих конвейеров являются компактность, простота конструкций, надежность, безопасность. Производительность подвесного конвейера (шт/ч):
где v Т - скорость конвейера, м/с (менее 0,5); п - число штучных грузов; а - шаг грузонесущих подвесок, м. Винтовой конвейер работает от электромотора через редуктор (см. рисунок 33 - а), имеет рабочий орган в виде шнека, вращающегося в закрытом желобе на опорах. Эти конвейеры применяют для перемещения непрерывным потоком сыпучих и тестообразных материалов (цемента, песка, бетонной смеси и т.д.) на расстоянии до 40м по горизонтали или под углом до 20°. В начале желоба сверху имеется загрузочная воронка, а в конце снизу - разгрузочное отверстие. Винтовой конвейер составляется из секций длиной 2 - 4м, в местах стыковки секций смонтирована опора шнека. Диаметр шнека 0,1 - 0,8м. Конструктивно шнек выполняется правого или левого вращения, сплошным (для сыпучих материалов рисунок 33 - б), ленточным (для крупнокусковых рисунок 33 - в), фасонным (для мокрых, слежавшихся материалов) или лопастным (для бетонных смесей рисунок 33 - г). На рисунке 33 - а представлена схема винтового конвейера и типы рабочих органов: 1 - электромотор; 2 - редуктор; 3 -желоб; 4 - опора промежуточная; 5 - шнек; 6, 7 -воронкизагрузочная и разгрузочная. Производительность винтового конвейера (м /ч) определяется по формуле:
где F сеч - площадь поперечного сечения материала в желобе, м2;
S - шаг винта, м; n - частота вращения винта, 40 - 120 мин-1. Достоинствами винтовых конвейеров являются надежность в работе при транспортировке пылевидных и сыпучих материалов, компактность и удобство загрузки и выгрузки; недостатками повышенная энергоемкость, ограниченная длина, заклинивание шнека при перегрузках и интенсивное изнашивание лопастей шнека.
Рисунок 33. Винтовой конвейер и типы рабочих органов: 1 - электромотор; 2 - редуктор; 3 -желоб; 4 - опора промежуточная; 5 - шнек; 6, 7 -воронкизагрузочная и разгрузочная Гравитационные конвейеры широко распространены на строительных площадках. К ним относятся спускные желоба, лотки и трубы, каскадные и винтовые спуски. Спускные желоба и трубы (которые неподвижны при работе) используют для раздачи бетонной смеси, для выгрузки мусора. Достоинства таких конвейеров в том, что они не имеют приводов и просты по конструкции; недостатки - ограниченная длина и трудноуправляемая скорость движения груза. Производительность гравитационного конвейера (т/ч) определяется:
где k н - коэффициент наполнения желоба; Vc р - средняя скорость движения груза, м/с; р - плотность материала, т/м3 ; А - площадь сечения желоба, м2. Роликовые конвейеры (рольганги) применяют для транспортирования штучных грузов. Основной частью конвейера является рама, на которой при помощи подшипниковых узлов смонтированы цилиндрические ролики. Ролики могут быть свободного качения или иметь электромеханический привод. В случаях транспортировки легкоповреждаемых грузов используют конвейеры с роликами, имеющими обрезиненную поверхность.Длятранспортирования круглых предметов ролики изготовляют с вогнутой (желобчатой) поверхностью. В большинстве случаев ролики имеют диаметр 0,40 - 1,50м, длину 0,16 - 1,20м, при этом максимально допустимая нагрузка на один ролик в зависимости от их диаметра составляет 1 - 20кН. Движение тяжелых предметов от действия сил гравитации осуществляется при угле наклона конвейера до 1,5, а легких - до 5°. Вибрационные конвейеры используются для перемещения сыпучих или штучных грузов по днищу колеблющегося в определенном направлении желоба или трубы. Источником колебаний является вращающаясянеуравновешеннаямасса. Амплитуда колебаний обычно 0,005 - 0,015м и частота 50-7Гц соответственно. В процессе транспортирования материал подбрасывается вверх под действием вибрации и постоянно движется вдольпонаклонному желобу под углом - 12°. Износ желоба при этом весьма незначителен. Длина конвейера - до 60м. Существенным недостатком вибрационных конвейеров являютсяих шум при работе, невозможность, транспортирования липких материалов, необходимость сооружения массивных фундаментов. Качающиеся конвейеры имеют амплитуду качания 0,1 - 0,2м, при частоте 8-10Гц. Транспортирующий желоб монтируется на роликах, перекатывающихся по рельсам, или подвешивается на рычагах. Возвратно-поступательное движение желоб получает от кривошипно-шатунного механизма или эксцентрика. |
Последнее изменение этой страницы: 2019-04-19; Просмотров: 271; Нарушение авторского права страницы

 , (48)
, (48) - коэффициент использования объема желоба.
- коэффициент использования объема желоба. , (49)
, (49) , (50)
, (50) - коэффициент заполнения желоба материалом по сечению, k н = 0,1 - 0,4;
- коэффициент заполнения желоба материалом по сечению, k н = 0,1 - 0,4;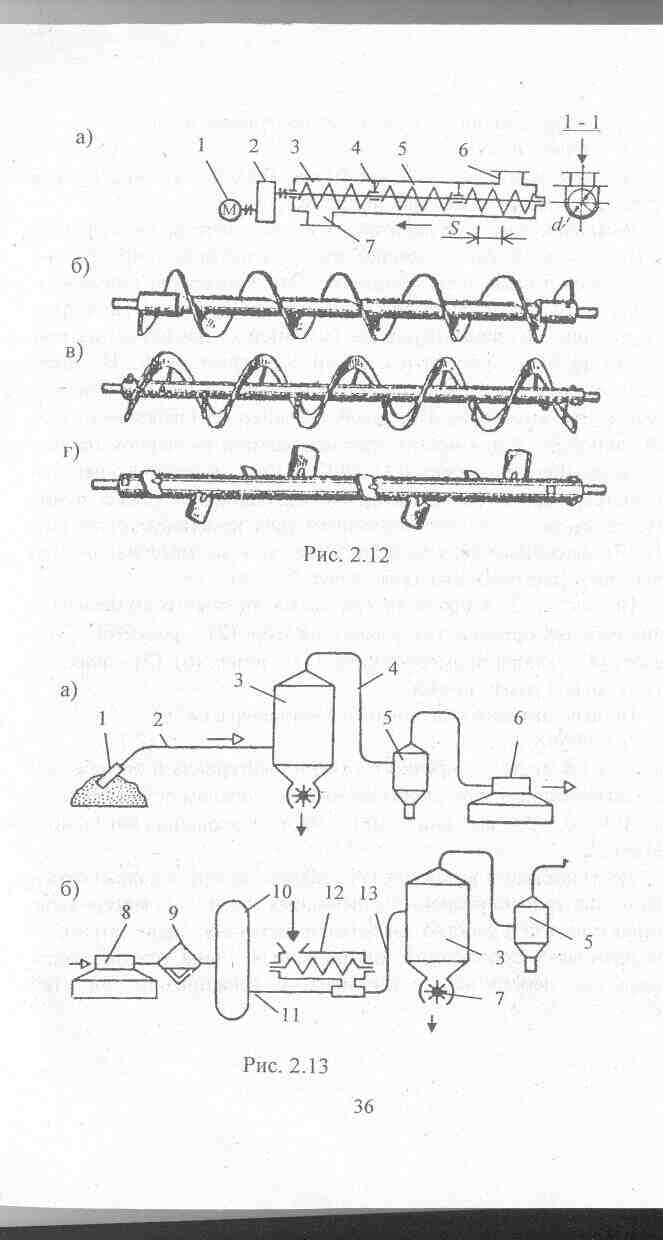
 , (51)
, (51)