
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Поисковые методы экспериментальной оптимизации
Как правило, конечной целью экспериментального исследова- ния является достижение и поддержание экстремальных показателей процесса (max или min). Задача оптимизации заключается в определе- нии таких значений управляемых факторов, при которых его отклик достигает экстремального значения. Графическая интерпретация задачи оптимизации объекта y(x1, x2) при двух факторах x1, x2 показана на рис. 3.7 a, б. Здесь точка А соответствует максимуму функции отклика ys при оптимальных значениях факторов x1s и x2s. Замкнутые линии на рис. 3.7 б характе- ризуют линии постоянного уровня и описываются уравнением y=f(x1, x2)=B=const. Поисковые методы оптимизации относятся к категории итера- ционных процедур. Процесс исследования разбивается на шаги, на каждом шаге реализуют ряд опытов и определяют, каким образом нужно изменить факторы, чтобы получить улучшение результата. Информация, получаемая на каждом очередном шаге, используется для выбора последующего шага. В поисковых методах эксперимен- тально определяют точку оптимума с точностью до величины приня- того рабочего шага по каждому фактору. Стратегия поискового метода предусматривает: 1) определение направления движения из некоторой точки. Направление должно обеспечивать значение функции отклика к наиболее оптимальному, чем в исходной точке; 2) многократное повторение указанного этапа и определение оптимальной точки с точностью до величины принятого рабочего ша- га движения.
а
б Рис. 3.7. Оптимизация отклика y (x1, x2) : а – поверхность отклика, б – линии равного отклика (уровня) y = f(x1,x2) = B = const при количестве факторов n = 2 Допущения поисковых методов: 1) объект исследования статический; 2) поверхность отклика непрерывная, дифференцируемая во всех точках, одноэкстремальная; 3) в методах оптимизации, использующих математические мо- дели, выполняются все допущения регрессионного анализа; 4) объект исследования стационарный (без наличия временного дрейфа); 5) отсутствуют ограничения на возможные значения факторов или их комбинаций. Метод Гаусса-Зайделя 1) Факторами варьируют поочередно, а остальные фиксируют на определенном уровне; 2) Каждый фактор меняют до достижения частного экстремума на поверхности отклика; 3) По окончании варьирования n-го фактора возвращаются к ва- рьированию 1-го фактора; 4) Достижение точки, движение с которой в любом направлении будет неудачным, служит критерием для прекращения поиска; 5) Достигнутая точка принимается в качестве оценки точки экс- тремума с точностью до величины принятого шага варьирования по каждому фактору. Выбирают точку М0, соответствующую наилучшей из известных рабочих режимов объекта или центру исследуемой области (рис. 3.8). Выбирают шаг по каждому опыту. Поверхность отклика в плоскости X10X2 изображается линиями равного уровня (выхода). 1
Фактор x1 варьируется на пробный шаг для определения направления движения. Dx / в обе стороны от М0 Направление M 0 M 0¢ . Следующее движение из М0 с рабочим шагом Dx1 (Dx1 ³ Dx1¢, M0 M1 = M1M 2 = M 2 M3 = Dx1) . До достиже- ния частного экстремума в точке М3 по первому фактору. 2 этап. Точка М3 принимается за новую начальную точку с ко- ординатами x1=x1,3; x2=x2,0. Все факторы в форме x2 фиксируют на по- стоянных уровнях. Пробный шаг Dx / = M 3 M 3¢ = M 3 M 3¢ . Движение в
M3M3¢ с рабочим шагом Dx2 (Dx2 = M3M 4 ³ Dx2¢ ) до достижения частного экстремума по второму фактору. Эту точку М4 принимают начальной для 3-го этапа и т.д.
Рис. 3.8. Иллюстрация метода Гаусса-Зайделя
На n-ом этапе (при числе факторов n) варьируется фактор xn при фиксированном уровне остальных факторов. Выполняют пробное, а затем рабочее движение до достижения частного экстремума по n-ому фактору. Если абсолютный экстремум не достигнут, проводят новый цикл опытов и т.д. Достоинства метода: наглядность и простота, высокая помехо- защищенность. Недостатки метода: значительное увеличение количества опытов с увеличением управляемых факторов; не всегда удается за- фиксировать на длительное время все управляемые факторы кроме одного, что вызывает дополнительные погрешности нахождения частных экстремумов; если поверхность отклика имеет сложную фор- му, метод может дать ложный ответ в расположении абсолютного экстремума. Метод градиента Определяется начальная точка (наилучшая из известных). Зада- ется шаг варьирования Dx i по каждому фактору xi (i=1...n). Реализует-
ся пробный эксперимент ПФЭ 2n (ДФЭ 2n-p). В центре точки Х0 оцени- ваются коэффициенты регрессии b1, b2 ... bn и определяется направле- ние рабочего шага (рис. 3.9.). Рис. 3.9. Иллюстрация метода градиента Задается параметр рабочего шага с учетом физических и техно- логических ограничений. Совершается один шаг – движение в вы- бранном направлении. На этом данный цикл поиска завершается. Точка X1 является начальной для следующего этапа движения и цикл повторяется. При поисковом движении длина рабочего шага по- степенно уменьшается до тех пор, когда оценки b1, b2 ... bn становятся статически незначимыми. Достигнутая точка принимается за экстре- мум с точностью до длины последнего рабочего шага. Метод имеет большую скорость движения и точность определе- ния в этой области по сравнению с методом Гаусса-Зайделя, но обла- дает меньшей помехозащищенностью. Метод крутого восхождения (Бокса-Уилсона) Разработан в 1951 году. Объединяет элементы методов градиен- та и Гаусса-Зайделя (рис. 3.10). ПФЭ (ДФЭ) играет роль пробных опытов, по результатам кото- рых рассчитывают компоненты градиентов. Как и в методе градиента рабочее шаговое движение в области оптимума происходит по направлению градиента. Как в методе Гаусса-Зайделя при одном цик- ле рабочего шагового движения достигается лишь местный экстре- мум. 1) Выбирают начальную точку X0 (наилучшую из известных). 2) Задается шаг варьирования Dx i (i=1...n) по каждому фактору. В точке с центром Х0 проводят ПФЭ (ДФЭ) для определения вектора градиента. Результаты ПФЭ (ДФЭ) подвергают статистической обра- ботке: проверке воспроизводимости эксперимента; расчету и оценке значимости коэффициентов регрессии; проверке адекватности ре- грессионной модели и функции отклика. 3) Рассчитывают произведение b i × Dx i и фактор, для которого это произведение максимально принимают за базовый max (b i × Dx i ) =b d × x d . 4) Для базового фактора выбирают шаг крутого восхождения l кв = l × b d × Dx d ( 0 £ l £ 1), где -
Рис. 3.10. Иллюстрация метода Бокса – Уилсона
5) Определяют шаги крутого восхождения по остальным факто- рам
l f кв = l кв ( f ¹ i) ,
6) Совершается рабочее движение. Очевидно, что f-ая h-ой точ- ки будет
x f ,h = x f0 ± h × l f кв = x f0 ± h × l bf × Dx f , где - «+» - поиск максимума, «–» - поиск минимума. 7) В каждой рабочей точке могут быть проведены опыты для повышения точности измеренного значения отклика. В связи с при- ближением к области оптимума, где кривизна поверхности увеличи- вается, шаги варьирования Dx i (i=1...n) для каждого последующего шага выбирают такими же или уменьшают. 8) Поиск прекращают, когда оценки bi (i=1...n) коэффициентов регрессии получают статистически незначимыми. Достоинства метода: более экономичен; прост в реализации; от- носительно высокая помехоустойчивость. Этот метод применяют наиболее часто при решении задач экс- периментальной оптимизации. Симплексный метод Симплексный метод планирования позволяет без предвари- тельного изучения влияния факторов найти область оптимума. Метод не требует расчета градиента функции отклика, и поэтому относится к безградиентным методам поиска оптимума. Для поиска области опти- мума используют специальный план эксперимента в виде симплекса. Симплекс – это простейший выпуклый многогранник, образо- ванный n+1 вершинами в n-мерном пространстве, которые соединены между собой прямыми линиями. При этом координаты вершин сим- плекса являются значениями факторов в отдельных опытах. Симплекс на плоскости (n=2) является треугольником, в трех- мерном пространстве (n=3) – тетраэдром, в n-мерном пространстве – многогранником. Симплекс называется правильным (регулярным), если в нем расстояние между двумя любыми вершинами есть величи- на постоянная. Особенность метода заключается в совмещении процессов изу- чения поверхностей отклика и перемещения по ней благодаря тому, что эксперименты проводят в точках факторного пространства в соот- ветствующих вершинах симплексов. Сущность метода. Линиями постоянного уровня на нормиро- ванной факторной плоскости изображена одноэкстремальная поверх- ность отклика, нанесены факторные границы ximin и ximax для i=1,2. Штриховкой отмечена область недопустимых значений факторов. Начальная точка x0 является лучшей из известных режимов процесса. Эту точку принимают за вершину или центр начального симметрич- ного симплекс-плана. На рис. 3.11. изображен начальный правильный симплекс 1 с единичной стороной, одной из вершин которого является начальная точка x0.
Рис. 3.11. Иллюстрация симплексного метода Движение к экстремуму на каждом шаге осуществляется пере- ходом от рассматриваемого симплекса к новому. Для этого выявляют в рассматриваемом симплексе наихудшую вершину (т.2), отбрасыва- ют ее и строят точку симметричную (зеркальную) к ней относительно центра (n-1)-мерной оставшейся грани симплекса (т.4). Эта зеркальная точка (т.4) и грань образуют новый симплекс 2 прежней размерности, но центр его смещен в сторону экстремума на 1 шаг. Многократное повторение таких шагов приводит в область экстремума. Выбор размеров симплекса и его начального положения в опре- деленной мере произволен. При построении начального симплекса значения факторов в каждом опыте исходного симплекса определяют по формуле
x ij = x i0 + C ij Dx i ,
где x – координаты центра начального симплекса; Δx – интервал ва- i0 i рьирования i-го фактора; С – кодированное значение i-го фактора для ij j-го опыта, выбираемое из числовой матрицы для симплексного пла- нирования, приведенные в табл. 3.5.
Таблица 3.5 Коэффициенты С для выбора координат симплекса [12] ij
k = 1 i i + 1 = 1 ; R =
i ; i = 1,2,..., n, 2(i + 1)
(3.20)
Если, например, необходимо составить симплекс-план для двух факторов, то вначале ставят три опыта со следующими координатами: 1-й опыт x11 = x10 + k1Dx1 x21` = x20 + k2 Dx2 2-й опыт x12 = x10 + R1Dx1 x22` = x20 + k2 Dx2 3-й опыт x13 = x10 + 0 x23` = x20 - R2 Dx2 На рис. 3.12. показана схема построения начального симплекса. Допустим x =0 и x =0, а Δx =Δx =1, тогда в соответствии с форму- 10 20 1 2 лами (3.20) координаты опытов будут равны: опыт 1 (0,5; 0,289), опыт 2 (-0,5; 0,289) и опыт 3 (0; -0,577) и соответствовать координатам вершин равностороннего треугольника с длиной стороны, равной 1 (рис. 3.13). Начало координат будет находиться в точке пересечения медиан (биссектрис). Для определения координат новой вершины симплекса, т.е. условий проведения опыта в отраженной точке используют формулу
x = 2 n+1 x
, j ¹ i ,
j=1 (3.21) где x – координата новой вершины симплекса для i-й переменной; iн x – координата заменяемой точки (координата вершины симплекса с
наихудшим откликом перед ее отбрасыванием); 1 n +1 x n j =1
–
чение из координат всех вершин симплекса, кроме заменяемой.
Рис. 3.12 Схема построения начального симплекса
Рассмотрим признаки, при которых завершают процесс постро- ения новых симплексов: 1. Разность значений функции отклика в вершинах симплекса меньше ранее заданной величины. Имеет место выход в «почти ста- ционарную» область вблизи оптимума или достижение участка по- верхности y = f (x1;...; xn ) = c o n s t в виде «плато». В этом случае про- водят дополнительные опыты в стороне от симплекса, чтобы убедить- ся в отсутствии других участков с более существенной кривизной по- верхности. В качестве точки оптимума принимают точку в которой функция отклика имеет экстремум. 2. Отражение любой из вершин симплекса после однократного качания приводит к возврату симплекса в прежнее положение. Это означает «накрытие» симплексом точки оптимума. 3. Циклическое движение симплекса вокруг одной из его вер- шин на протяжении более чем нескольких шагов. Искомый оптимум расположен внутри области, охватываемой циркулирующим симплек- сом. При появлении второго и третьего признаков необходимо уменьшить размеры симплекса, т.е. расстояния между вершинами, и продолжить поиск, что позволит уточнить координаты искомого оп- тимума. Достоинства метода: высокая эффективность; на каждом шаге к экстремуму требуется реализовать условия только одного опыта независимо от числа факторов; вычисление координат зеркальных то- чек очень простое и не требует статистического анализа; оптимизация объекта при наличии факторных и функциональных ограничений очень проста; высокая помехозащищенность; решение о направлении движения к оптимуму на каждом шаге принимается после реализации одного опыта, тогда как в других методах необходима серия пробных опытов. Пример 4. Допустим, функция отклика описывается уравнением
y = 4 +12x1 - x21 + 30x - 3x2 2 . Из априорной информации известны
10 20 основной уровень. Интервалы варьирования факторов приняты рав- ными Δx = 1 и Δx = 1,5. 1 2
= 0,5; R1 = = 0,5;
= 0,289; R2 = = 0,577 .
Так как факторов два, симплекс представляет треугольник (n+1=2+1=3). Для построения начального симплекса определим коор- динаты первых трех опытов: Вершина 1: x = 3 + 0,5·1=3,5; x = -1 + 0,289·1,5 = -0,565; 11 21 Вершина 2: x = 3 -0,5·1 = 2,5; x = -1 + 0,289·1,5 = -0,565; 12 22 Вершина 3: x = 3 + 0 = 3; x = -1 -0,577·1,5 = -1,865. 13 23 После реализации опытов получены следующие результаты: y =15,84; y =9,78; y = -35,5. Наихудший результат получен в третьем 1 2 3 опыте y = -35,5. Следовательно, условия опыта 3 следует заменить. 3 Геометрическая траектория движения показана на рис. 3.14. Определим координаты вершины 4 нового симплекса :
х14 = 2(3,5 + 2,5) - 3 = 3;
х24 = 2(-0,565 - 0,565) +1,865 = 0,735.
Рис. 3.14.Геометрическая траектория движения
В четвертом опыте получен результат - у4 = 52,1. Из анализа ре- зультатов y1, y2 и y4, следует, что наименьший (наихудший) результат имеет вторая точка y2. Рассчитаем координаты вершины 5 нового симплекса: x15 = 4; x25 = 0,735. Результат опыта y5 = 57,1. Вычисляем координаты вершины 6 для замены вершины 1: x16 = 3,5; x26 = 2,035. Результат опыта y6 = 82,6. Затем получим вершины 7 с координатами (4,5; 2,035); 8 (4; 3,3); 9 (5;3,3); 10 (4,5;4,8); 11 (5,5;4,8). Результаты последних трех опытов: y9 = 105; y10 = 113; y11 = 112,32. Определим координаты вершины 12 :
x112 = 2 (4,5 + 5,5 ) - 5 = 5; 2
x212 = 2 (4,6 + 4,6 ) - 3,3 = 5,9. 2
Результат опыта y12 = 111. Как видно, точка 12 является наихудшей по сравнению с точка- ми 10 и 11. Поэтому возвращаемся к предыдущему симплексу с вер- шинами 9, 10, 11. Из двух точек 10 и 11 наихудший результат имеет точка 10. Следовательно, заменяем вершину 10 на вершину 13
x113 = 2 (5 + 5,5 ) - 4,5 = 6; 2
x213 = 2 (5,3 - 4,6 ) - 4,6 = 3,3. 2
Результат опыта y13 = 106.
В новом симплексе с вершинами 9 (5;3,3); 10 (5,5;4,6) и 13 (6;3,3) наихудший результат у опыта 9. Заменим вершину 9 на вершину 14
x114 = 2 (5,5 + 6 ) - 5 = 6,5; 2
x214 = 2 (4,6 + 3,3 ) - 3,3 = 4,6. 2
Результат опыта y14 = 114,21. В новом симплексе из вершин 11, 13 и 14 наихудшей является точка 13 ( y11 = 112,32; y13 = 106; y14 = 114,21). Заменим вершину 13 на вершину 15
x115 = 2 (5,5 + 6,5 ) - 6 = 6; 2
x215 = 2 (4,6 + 4,6 ) - 3,3 = 5,9. 2
Результат опыта y15 = 112.
Получен наихудший результат, чем в опытах 11 и 14. Поэтому возвращаемся к предыдущему симплексу. Из точек 11 и 14 меньший результат в опыте 11. Заменим вершину 11 на вершину 16
x116 = 2 (6,5 + 6 ) - 5,5 = 7; 2
x216 = 2 (4,6 + 5,9 ) - 4,6 = 5,9. 2
Результат опыта y16 = 111. Однако это тоже наихудший результат, поэтому в симплексе с вершинами 11, 14 и 15 заменяем точку 14 на точку 17
x117 = 2 (5,5 + 6 ) - 6,5 = 5; 2
x217 = 2 (4,6 + 5,9 ) - 4,6 = 5,9 . 2
Вершины 17 и 12 совпадают, y17 = y12 = 111. Вновь получен наихудший результат. Следовательно, экстремум находится внутри симплекса с вершинами 11, 14 и 15. Если с точностью до шага варьирования результаты устраивают, то задача считается решенной. Координаты экстремума y = 114, 21, при
этом: x1 » 6,5 и x2 » 4,6 . Если требуется более высокая точность, уменьшают интервал варьирования и от любой вершины двигаются вновь. Истинные координаты экстремума: x1 = 6 и x2 = 5; y = 115.
3.5. Планирование активного эксперимента по планам второго порядка Планами второго порядка называются планы активного экспе- римента, позволяющие определить оценки коэффициентов регресси- онной модели в виде полинома 2-го порядка, хорошо описывающего участки поверхности отклика со значительной кривизной y = b0
+ åbi x i 1
+ åb i j x i x j 1
+åb ii 1 x 2 .
Чтобы получить регрессионную модель, необходимо, чтобы число уровней варьирования di каждого из факторов xi (i=1...n) по крайней мере на единицу превышало степень самого полинома, т.е. di ³ 3. Полином второго порядка в количестве факторов n = 2 содержит 6 членов
Yˆ = b + b x + b x + b x x + b x2 + b x2 ,
(3.22) 0 1 1 2 2 12 1 2 11 1 22 2
при n = 3 содержит 11 членов
Yˆ = b0 + b1x1 + b2 x2 + b3 x3 + b12 x1 x2 + b13 x1 x3 + b23 x2 x3 + b123 x1x 2 x3 +
Наиболее простым по построению является план ПФЭ 3n. Каж- дый фактор в этом плане варьирует на трех уровнях (-1, 0, +1). Однако при количестве факторов более двух, число точек спектра плана N резко увеличивается. Поэтому этот план используют ограниченно. Более рациональным является применение центрально- композиционных планов (табл. 3.6). Основная компонента центрально-композиционного плана – спектр плана ПФЭ 2n и ДФЭ 2n-p + компоненты: 1 компонента: N1=2n (2n-p) точек с координатами ±1, ±1, ±1; 2 компонента: осевые точки Na =2*n, попарно расположенные на осях xi на расстояниях ±a1 ... ±an от начала координат. Если все осевые плечи равны, т.е. a1=a2= ... =an=a, то такой ЦКП симметрич- ный. 3 компонента: N0 центральных точек, расположенных в начале координат (0, 0 ... 0).
Таблица 3.6 Количество точек в плане в зависимости от числа факторов
Все эти компоненты образуют спектр ЦКП 2-го порядка. Общее число точек спектра ЦКП
N = N1 + N a + N0 = 2n- p + 2 × n +1. (3.23)
При этом, если p = 0, ядром плана является план ПФЭ 2n. В ЦКП каждый фактор варьируется на 5 уровнях (табл. 3.7). Последовательность решения задач регрессии. Вначале ставят опыты 1-4, составляющие ядро плана и позво- ляющие определить либо оценку линейной регрессионной по факто- рам, либо оценку неполно-квадратичной регрессионной модели
yˆ(x, b) = b0 + b1 × x1 + b2 × x2 , yˆ(x, b) = b0 + b1 × x1 + b2 × x2 + b12 × x1 × x2 . Таблица 3.7 Спектры симметричного ЦКП (n=2; N0=1)
Если регрессионные модели окажутся неадекватными функции отклика, то добавляют опыты 5-9, что позволит получить регрессион- ную модель (3.22) при n = 2. Если ранее был сформирован план ПФЭ и точность его функции отклика не удовлетворяет, то возможно достроить этот план до плана второго порядка (композиционный план) и сформировать функцию отклика в виде полного полинома второго порядка, без потери ин- формации, полученной ранее в опытах ПФЭ.
3.5.1 Ортогональный центрально-композиционный план второго порядка План называется центральным, если все точки расположены симметрично относительно центра плана. ОЦКП – центральный сим- метричный ортогональный композиционный план. В ОЦКП входят: ядро – план ПФЭ с N0 = 2n точками плана, n0 (одна для этого плана) центральная точка плана (xi = 0,i = 1,2,3,...n) и по две «звездные» точки для каждого фактора xi i = ±a, x j = 0, i = 1,2,3,...n; j = 1,2,3...n; i ¹ j , α – плечо «звездных» точек. При этом в каждой плоскости, содержащей ось Y и координат- ную ось i-того фактора (проходящую через центр плана), оказываются три значения фактора хi Y. (-a ,0,+a ) и три соответствующих значения Общее количество точек в плане ОЦКП составляет
где для ОЦКП n0 = 1. Графическое изображение ОЦКП для n = 3 показано на рис. 3.15.
Рис. 3.15. Графическое изображение ОЦКП при количестве фак- торов n = 3
В общем случае ортогональный центрально-композиционный план при трех (n) факторах представлен в таблице 3.8. В ОЦКП каж- дый фактор фиксируется на пяти уровнях Таблица 3.8 Ортогональный центрально-композиционный план при трех факторах
Величину а, которая зависит от количества факторов, называют константой преобразования и ее значение определяют по формуле
. (3.24) .
Плечо звездных точек α рассчитывают по формуле
Например, ОЦКП при числе факторов n = 3 будет иметь следу- ющие параметры плана :
= 8, N = 8 +1× 3 +1 = 15,
1 ( 15× 8 - 8)» 1,215,
1 - a = 0,27, - a = -0,73, a 2 - a = 1,2152 - 0,73 = 0,75.
Соответственно ОЦКП примет вид (табл. 3.9) [13].
Таблица 3.9 Ортогональный центрально-композиционный план с кодированными значениями трех факторов
При реализации опытов плана формируется полином Yˆ = b0 + b1x1 + b2 x2 + b3 x3 + b12 x1 x2 + b13 x1 x3 + b23 x2 x3 + b123 x1 x2 x3 +
(3.26)
После преобразования формула (3.26) примет традиционный вид полинома второго порядка
Yˆ = b¢ + b x + b x + b x + b x x + b x x + b x x + b x x x + b x2 + b x2 + b x3,
3 3 12 1 2 13 1 3 23 2 3 123 1 2 3 4 1 5 2 6 2
0 = b0 - b4 × a + b5 × a - b6 × a .
Коэффициенты полинома ляют по формуле b0 , b1 , b2 , b3 , b12 , b13 , b23 , b123 , b4 , b5 , b6 опреде-
2 iu
(3.27) u =1
В табл. 3.10 приведены значения параметров ОЦКП при различ- ном количестве факторов n. Таблица 3.10 Значения параметров ОЦКП при различном количестве факторов n
Пример 5. План ОЦКП для n = 2 с результатами экспери- мента Параметры плана : N0 = 4, N = 9, α = 1, а = 2/3, 1– а = 1/3, –а = – 2/3, a2 - a = -2 / 3 . План представляет собой ядро плана ПФЭ 22 с добавленными опытами 5 – 9.
Таблица 3.11 Ортогональный центрально-композиционный план с кодированными значениями двух факторов
Коэффициенты регрессии определим по формуле (3.27)
å x0Y0
6 + 3 + 4 + 7 + 5 + 5 +1 + 3 + 2
= 4;
0U U =1
b1 = - 6 + 3 - 4 + 7 - 5 + 5 + 0 ×1 + 0 × 3 + 0 × 2 = 0;
2 6 b12 = 6 - 3 - 4 + 7 = 1,5;
b = 1/ 3(6 + 3 + 4 + 7 + 5 + 5) - 2 / 3(1 + 3 + 2) = 3; 3 6(1/ 3)2 + 3(2 / 3)2
4 2
После подстановки значений коэффициентов регрессии в поли- ном и его преобразования получим уравнение регрессии
Yˆ = 4 + 0 × x + 0, 67x + 3(x2 - 0, 67) + 0 × (x2 - 0, 67) +1, 5x x = 1 2 1 2 1 2 = 2 + 0, 67x + 3x2 +1, 5x x . 2 1 1 2
Yˆ u - Y u ,
подтверждающие достаточно высокую точность уравнения регрессии.
3.5.2. Ротатабельные планы Ротатабельные планы – планы, у которых точки плана распо- ложены на окружностях (сферах, гиперсферах). В ротатабельном плане первого порядка точки плана расположены на одной окружно- сти (сфере, гиперсфере) с радиусом R..
где V=1,…, N - номер точки плана, i =1,…, n – номер фактора. При таком плане точность оценивания функции отклика в лю- бом направлении факторного пространства (для всех точек плана) одинаковая. Ротатабельный план может быть симметричным, когда точки плана располагаются симметрично друг другу. Например, план ПФЭ 2n является ротатабельным симметричным планом первого порядка. У ротатабельных планов второго порядка точки плана располо- жены на двух концентрических гиперсферах с радиусами R1 и R2, ко- торые определяются формулами :
для V = 1,…, n0 и
для W = 1,…, n0, где V и W – текущие номера точек плана в двух подмножествах опы- тов N0 и n0 из общего количества опытов N, которые относятся к двум разным концентрическим сферам. В случае, когда R2 = 0, одна из сфер будет вырожденной.
Ротатабельный план является ортогональным, если выполняется условие ортогональности å x iu × x ju = 0, u =1
где i = 1,..., m; j = 1,..., m; m f n,i ¹ j – номера столбцов плана. Ротатабельный ортогональный центрально-композиционный план Ротатабельный ортогональный центрально-композиционный план (РОЦКП) строится аналогично ОЦКП. К ядру плана (это план ПФЭ 2n) добавляют «звездные» точки – по две на каждый фактор и несколько точек в центре плана. «Звездные» точки должны распола- гаться на поверхности гиперсферы с радиусом R, на которой лежат и точки плана ПФЭ 2n, то есть плечо «звездных» точек α должно рав- няться радиусу R. Это обеспечивается при выполнении условия орто- гональности, только при соответствующем выборе числа наблюдений в центральной (нулевой) точке плана n0. Если в ОЦКП n0 = 1 для лю- бого числа n, то для РОЦКП n0 зависит от числа факторов n. Радиус сферы, на которой лежат точки плана ПФЭ 2n при двух уровнях варьирования факторов с диапазоном
В зависимости от количества факторов значение радиуса меня- ется (рис.3.16). Поэтому, при построении РОЦКП с ядром из плана ПФЭ 2n пле- чо «звездных» точек определяется количеством факторов
Параметры РОЦКП аналогичны параметрам ОЦКП второго по- рядка с ядром из плана ПФЭ 2n: N = N0 + 2n + n0 – полное число точек композиционного плана второго порядка;
а б в
2 = 1,414; в) – n = 3, R = 3 = 1,732
Количество наблюдений в центре плана РОЦКП определяют по формуле
Если n0 принимает не целое значение, то при практическом по- строении плана его округляют до целого, однако при этом свойство ортогональности плана нарушается. В табл. 3.12. приведены парамет- ры РОЦКП в зависимости от числа факторов. Пример 6. План ротатабельного ортогонального центрально- композиционного плана для n = 2 с результатами эксперимента Параметры плана:
N = 22 = 4, N = 22 + 2 × 2 + n = 16,
- a = -0,5, a 2 - a = 2 - 0,5 = 1,5 .
Таблица 3.12 Параметры РОЦКП в зависимости от числа факторов
Опыты в центре плана (точки с 9 по 16) не проводят восемь раз. Проводят только один опыт, результат которого записывают во все восемь строк. Строки сокращать нельзя, так как нарушается свойство ортогональности, и коэффициенты полинома будут определены не- верно. Коэффициенты квадратичного полинома рассчитают по ранее приведенным формулам. В табл. 3.13 приведен РОЦКП, который представляет собой рас- смотренный ранее план ПФЭ 22 с добавленными опытами 5-16.
в 6 + 3 + 4 + 7 + 5 + 5 + 1 + 3 + 2 × 8 = 50 = 3,125, 0 16 16 â - 6 + 3 - 4 + 7 - 5 ×1,414 + 5 ×1,414 +10× 0 = 0 = 0,
в = 0,6035, 1 4 ×12 + 2(1,414)2 +10× 02 8 2
в12 6 - 3 - 4 + 7 + 12 × 0 = 1,5 ,
в = 0,5 ( 6 + 3 + 4 + 7 ) +1,5 ( 5 + 5 ) - 0,5 ( 1 + 3 + 8 × 2 ) = 15 = 1,875 , 11 14 × 0,52 + 2 ×1,52 8
в22 0,5 ( 6 + 3 + 4 + 7 ) - 0,5 ( 5 + 5 ) +1,5 ( 1 + 3 ) - 0,5 × 2 × 8 = 0,375. 8 Таблица 3.13 РОЦКП при двух факторах и результаты его реализации
Уравнение регрессии получит вид
+ b x + b x + b x x + b (x2 - a )+ b (x2 - a )= 3,125 + 0 × x +
2 1 2 1 2 1 2 +1,5x x +1,875x2 + 0,375x2 . 1 2 1 2
В предпоследнем и последнем столбцах плана (табл. 3.13) при- ведены расчетные значения функции отклика и расхождения со зна- чениями опытов. 3.5.3. Симметричные композиционные планы типа Bn Симметричные композиционные планы типа Bn состоят из ядра и осевых точек. Центральных точек они не содержат n0 = 0, и при лю- бых n осевое плечо равно a = 1. В табл. 3.14 показан план В2.
Коэффициенты регрессии определяют по формулам :
- b n N (x 2 ) y ,
0 å g g =1 åå i g g i=1 g =1 (3.28)
i å 2 g =1
i g g (3.29)
ij å 3 g =1
i j g g (3.30)
b = c n (x2 ) y - d n N (x2 ) y - b N y
ii N å
i g g N åå i g g N å g. (3.31) g =1 i=1 g =1 g =1
Дисперсии оценок коэффициентов регрессии определяют по формулам :
a S 2 {y},
(3.32) S 2 {b }= (l N )-1 S 2 {y}, (3.33)
2 ij 3 N )-1S 2 {y}, (3.34) S 2 {b }= c - d S 2 {y}.
(3.35)
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2019-04-19; Просмотров: 363; Нарушение авторского права страницы






 где -
где -

 2i(i + 1) i
2i(i + 1) i где n – количество факторов.
где n – количество факторов.


 По формулам (3.20) рассчитаем коэффициенты :
По формулам (3.20) рассчитаем коэффициенты :
 k1 =
k1 = k2 =
k2 = 2
2 2
2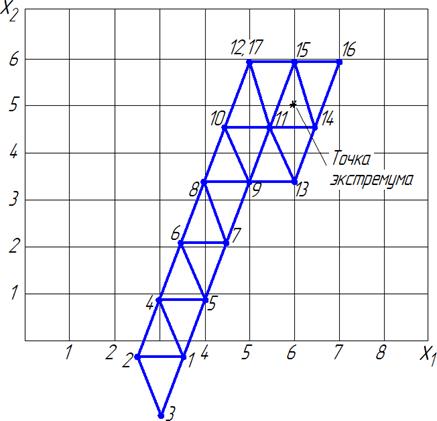


 , -1, 0, 1,
, -1, 0, 1,  ).
).

 a = =
a = =
 a = ( ). (3.25)
a = ( ). (3.25) a = » 0,73; a =
a = » 0,73; a =
 2
2


 6
6 4
4
 b = 1/ 3(6 + 3 + 4 + 7 + 1 + 3) - 2 / 3(5 + 5 + 2) = 0.
b = 1/ 3(6 + 3 + 4 + 7 + 1 + 3) - 2 / 3(5 + 5 + 2) = 0. = const = R,
= const = R, = const1 = R1 ,
= const1 = R1 , = const2 = R2 ,
= const2 = R2 ,
 1
1 R = .
R = . a = .
a = . a = – константа преобразования элементов столбцов, соответ- ствующих квадратам факторов.
a = – константа преобразования элементов столбцов, соответ- ствующих квадратам факторов.

 Рис. 3.16. Радиус окружности (сферы), на которой лежат точки плана ПФЭ 2n при диапазоне варьирования факторов от –1 до +1: а) – n = 1,
Рис. 3.16. Радиус окружности (сферы), на которой лежат точки плана ПФЭ 2n при диапазоне варьирования факторов от –1 до +1: а) – n = 1, R = 1 = 1; б) – n = 2, R =
R = 1 = 1; б) – n = 2, R = n0 2n 2n.
n0 2n 2n.




 4 ×12
4 ×12





