|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Ульяновское высшее авиационное училище. Министерство транспорта Российской ФедерацииСтр 1 из 18Следующая ⇒
Министерство транспорта Российской Федерации Федеральное государственное образовательное учреждение высшего профессионального образования Ульяновское высшее авиационное училище Гражданской авиации (институт)
Авиационные приборы И пилотажно-навигационные комплексы Учебное пособие В 2 частях Часть 1
Ульяновск 2007 ББК О567 я7 + О571-521 я7 А20 Антонец Е.В. (гл. 1, 4), Смирнов В.И. (гл. 2), Федосеева Г.А. (гл. 3). Авиационные приборы и пилотажно-навигационные комплексы: учеб. пособие. В 2 ч. / сост. Е.В. Антонец, В.И. Смирнов, Г.А. Федосеева. – Ч. 1. – Ульяновск: УВАУ ГА, 2007. – 119 с.
Рассмотрены состав и структура бортового ПНК, условия его эксплуатации, реальные точностные характеристики, достигнутые к настоящему времени. Приведены кинематические и электрические схемы измерителей параметров режима полёта воздушного судна и измерителей параметров, характеризующих режим работы авиадвигателей. Рассмотрены принципы действия и схемы измерителей высоты и скорости полёта, авиагоризонтов. Предназначено для курсантов и студентов заочной формы обучения специализации 160503.65.01 – Лётная эксплуатация гражданских воздушных судов, 160505.65.01 – Управление воздушным движением, 160503.65.05 – Лётная эксплуатация силовых установок и функциональных систем воздушных судов Содержание 1. Общие сведения о пилотажно-навигационном комплексе воздушного судна и условиях его эксплуатации. 3 2. Элементы восприятия, измерения и преобразования пилотажно-навигационной информации. 18 3. Приборные средства измерения высотно-скоростных параметров полета. 58 4. Измерители углов крена и тангажа ВС, системы авиагоризонтов. 93 Библиографический список. 117
ã Антонец Е.В., Смирнов В.И., Федосеева Г.А., составление, 2007
Общие сведения о пилотажно-навигационном Комплексе воздушного судна и условиях Его эксплуатации Основным назначением ВС, независимо от его конструктивной схемы и тактико-технических данных, является выполнение полёта по заданному маршруту. Задачи реализации траектории полёта, контроля точности выполнения этого процесса и коррекции возникающих отклонений возлагаются на бортовую информационно-управляющую систему (БИУС), элементами которой являются экипаж ВС и пилотажно-навигационный комплекс. В полёте БИУС занята непрерывным решением двух основных задач: - управление и стабилизация положения центра масс ВС на заданной траектории в продольной и боковой плоскостях движения; - управление и стабилизация определенного углового положения ВС относительно направлений меридиана, истинной геоцентрической вертикали места нахождения летательного аппарата, а также – вектора скорости Это – соответственно задачи навигации и пилотирования ВС. Решение обеих задач невозможно без применения приборных средств: датчиков, систем, входящих в состав единого бортового комплекса навигационно-пилотажного оборудования. Для устранения непрерывно возникающих в полёте, вследствие воздействий со стороны атмосферы, отклонений ВС от заданного режима необходимо выполнение следующей совокупности операций: - восприятие датчиками первичной информации о состоянии ВС и его двигателей; - измерение возникающих отклонений от заданных значений параметров режима полёта ВС и режима работы авиадвигателей; - преобразование полученной информации, отображение её на индикаторах, размещённых на приборных досках членов экипажа; - определение в соответствии с полученными отклонениями параметров режима полёта необходимых по направлению и величине перемещений органов управления; - приложение усилий, потребных для перестановки в новое положение соответствующих исполнительных механизмов и агрегатов управления; - обеспечение динамического качества процесса возвращения объекта к требуемому исходному режиму состояния; - контроль критических параметров полёта ВС и работы авиадвигателей, сигнализация и предупреждение выхода объектов управления на критические режимы. Состав типового пилотажно-навигационного Комплекса (ПНК) Состав и структура ПНК любого ВС определяются двумя требованиями, необходимыми для выполнения безопасного качественного полета: - получение обязательной для создания образа полета и управления объектами информации о параметрах состояния воздушного судна, авиадвигателей и функциональных систем; - обеспечение высокой точности и надежности информации за счет резервирования отдельных блоков или целых каналов измерения и преобразования сигналов. Едиными нормами летной годности самолетов гражданской авиации и Федеральными авиационными правилами предусмотрен стандартный комплекс навигационного и пилотажного оборудования, обеспечивающий выполнение отмеченных требований [3, 4]. В состав бортового комплекса входит восемь групп средств приборного оборудования, позволяющих решать навигационные и пилотажные задачи (под средствами подразумеваются датчики, преобразователи, системы, локальные комплексы):
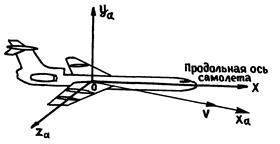
Рис. 1.1. Параметры, измеряемые пилотажно-навигационными приборами: H – высота полета (различают истинную, относительную и абсолютную высоту); V – скорость полета (различают индикаторную, истинную воздушную и путевую скорости); V y – вертикальная скорость; J – угол тангажа (между осью Ox самолета и плоскостью горизонта); g – угол крена (угол между осью Oy и плоскостью XOY g); y – курс – угол между проекцией оси Ox на горизонтальную плоскость и направлением меридиана (различают магнитный и истинный (географический) курс); wy – угловая скорость поворота самолета относительно оси Oy; j – географическая широта места; l – географическая долгота места; О – центр тяжести самолета; Ox – продольная ось самолета; Oz – поперечная ось самолета; Oy – нормальная ось, перпендикулярная плоскости xOz; OY g – земная вертикаль 2. Система авиагоризонтов, воспринимающая угловые отклонения ВС относительно центра масс в продольной и боковой плоскостях движения, определяет углы крена gи тангажа J. 3. Курсовые системы и приборы определяют значение углов истинного и магнитного курса y(см. рис. 1.1). 4. Навигационные системы, служащие для определения координат места положения центра масс ВС – широты j, долготы l. 5. Системы автоматического управления и стабилизации угловых координат g, J, y, а также линейных параметров движения центра масс ВС: высота Н, воздушная скорость V, число Маха М. 6. Средства предупреждения критических режимов полёта по таким параметрам, как угол атаки a, нормальная перегрузка ny = 7. Средства восприятия, измерения и контроля параметров работы авиадвигателей (рис. 1.2), а также обеспечивающих эту работу топливной и масляной систем.
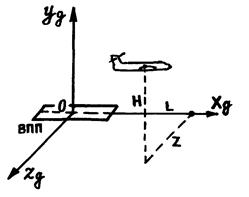
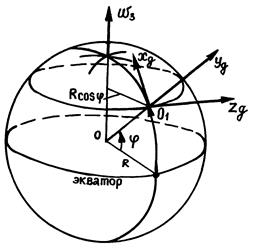
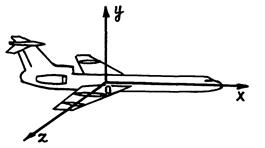
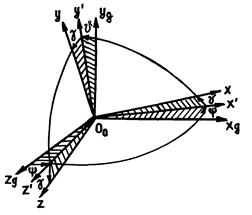
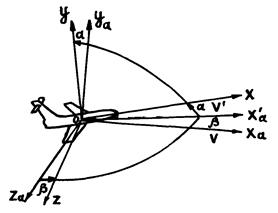
Рис. 1.2. Параметры, измеряемые приборами работы поршневого двигателя: Qтопл – количество топлива в банках; Qмасла – количество масла; q – расход топлива в единицу времени; pтопл – давление топлива перед карбюратором; pмасла – давление масла в системе смазки; pнаддува – давление наддува; tмасла – температура масла; tцил – температура цилиндров двигателя; n – число оборотов коленчатого вала двигателя в единицу времени 8. Бортовые устройства и системы регистрации параметров ВС, авиадвигателей и функциональных систем, предназначенные для проведения послеполётного контроля. Примерами таких систем являются БУР-СЛ-1, МСРП-12, САРПП-12. Измерения параметров полёта Положение ВС в пространстве принято определять, используя три системы координат: земную, связанную и скоростную. Целесообразность выбора конкретной системы координат определяется в каждом отдельном случае в зависимости от решаемых вопросов. При рассмотрении движения ВС в качестве отсчетной обычно выбирают систему координат, связанную с земными ориентирами: вертикалью места, меридианом или осевой линией ВПП – так, как показано на рис 1.3, а. Начало земной системы координат совмещают, например, с точкой исполнительного старта на ВПП или с точкой местоположения ВС на земной поверхности при выполнении полёта. Ось ОУ g направляют по истинной вертикали места. Плоскость ОХg Zg при этом будет совмещена с плоскостью горизонта, ось ОХg может быть направлена по осевой линии ВПП или на север. Оси связанной системы координат OXYZ (см. рис. 1.3, б) совпадают с осями эллипсоида инерции ВС. Начало координат помещается в центре масс самолёта, ось ОХ направлена по его продольной оси, ось ОУ – по нормальной оси и лежит в плоскости продольной симметрии ВС, ось О Z – боковая, лежит в боковой плоскости OXZ. Скоростная система координат ОХа Yа Zа (см. рис. 1.3, в), ось ОХа которой совмещена с вектором истинной воздушной скорости, необходима для получения аэродинамических характеристик обтекания ВС, в частности, углов атаки aи скольжения b. Ось OYa лежит в плоскости продольной симметрии, а ось OZa перпендикулярна плоскости OXaYa. Движение самолёта в пространстве по отношению к выбранной земной системе координат можно представить состоящим из движения вокруг центра масс (вращательного) и движения центра масс (поступательного). Так как в каждом из этих движений самолёт обладает тремя степенями свободы, то в целом он имеет шесть степеней свободы.
Рис. 1.3. Система координат и углы Эйлера: а - земная система координат; б - связанная система координат; в - скоростная система координат; г - к образованию углов рысканья, тангажа и крена путем трех последовательных поворотов; д - к образованию углов скольжения и атаки Для определения положения самолёта в пространстве необходимо знать шесть координат: три линейных и три угловых. Эти шесть координат как функции времени являются параметрами движения самолёта. Линейные параметры Xg, Yg, Zg характеризуют положение центра масс самолёта относительно выбранной земной системы координат (см. рис. 1.3, а). В данном случае по оси О Xg определяется пройденное расстояние по заданной линии пути, по оси ОУ g – высота полёта и по оси О Zg – боковое уклонение. Их первые и вторые производные представляют соответственно линейные скорости и ускорения центра масс. Параметры y, J, gхарактеризуют угловое положение ВС относительно земной поверхности. Иначе говоря, угловые параметры характеризуют положение связанной с самолётом системы координат OXYZ относительно земной системы OXgYgZg (см. рис. 1.3, г). Угол yназывается углом рысканья. Это угол между осью О Xg и проекцией ОХ¢ продольной оси самолёта ОХ на горизонтальную плоскость. Угол y считается положительным, если продольная ось самолёта повернута влево от линии пути. Угол J называется углом тангажа. Это угол между продольной осью самолёта ОХ и плоскостью горизонта. Он считается положительным, если продольная ось самолёта повернута вверх от плоскости горизонта. Угол gназывается углом крена. Он заключен между плоскостью симметрии самолета XOY и вертикальной плоскостью, проходящей через продольную ось самолёта. Угол крена считается положительным, если опущено правое крыло и приподнято левое. Образование углов y, J, g можно продемонстрировать путём трех последовательных поворотов ВС и его связанной системы координат относительно центра масс. Пусть имеем земную систему координат OXgYgZg (см. рис. 1.3, г). В исходном положении совместим связанную систему координат с земной. Повернем связанную систему координат вокруг оси О Yg на угол y.Связанная система координат принимает в этом случае положение OX ¢ YgZ ¢ . Второй поворот производим вокруг оси О Z¢ на угол J. После этого поворота связанная система координат занимает положение OXY ¢ Z¢. После третьего поворота вокруг оси ОХ на угол g связанная система координат занимает положение OXYZ. Представленная на рис. 1.3, г картина трёх последовательных поворотов даёт возможность вывести известные кинематические уравнения Эйлера:
где wx, wy, wz – угловые скорости ВС относительно соответствующих осей;
Из системы уравнений (1.1) легко определяются соотношения, позволяющие при выполнении полёта вычислять угловые координаты ВС по измеренным угловым скоростям
Положение связанной системы относительно скоростной системы координат определяется двумя аэродинамическими параметрами – углом атаки a и углом скольжения b(см. рис. 1.3, д). Углом атаки называется угол между проекцией V ¢ вектора истинной воздушной скорости на плоскость симметрии самолёта XOY и продольной осью самолёта ОХ. Углом скольжения bназывается угол между вектором истинной воздушной скорости и продольной плоскостью симметрии ВС. В частном случае, когда b = 0, угол атаки есть угол между вектором истинной воздушной скорости и продольной осью ВС. Показанные на рис. 1.3, д два последовательные поворота на углы b и aпозволяют совместить скоростную систему координат со связанной, а также определяют составляющие вектора скорости ВС по осям ОХ, OY, OZ:
Тенденции развития ПНК В настоящее время повышение точности и надёжности работы бортового ПНК в целом, отдельных его систем и приборов достигается использованием новых конструктивных, технологических, структурных и алгоритмических методов. Во многом это стало возможным за счёт широкого внедрения в практику современных лазерных, пьезокерамических и пьезоэлектрических измерителей, радиоэлектронных изделий и цифровой вычислительной техники в разрабатываемые и уже эксплуатируемые ПНК. Построение новых ПНК базируется на использовании следующих основных принципов: 1. Применение зарезервированных датчиков с цифровым или частотным выходным сигналом, воспринимающих изменение физических параметров полёта (ускорение, скорость, высота, аэродинамические углы, угловые скорости, углы ориентации в пространстве и т.д.), в основе которых лежит использование свойств полупроводников, пьезокерамических, кварцевых, оптоэлектронных и других чувствительных элементов. 2. Использование микропроцессорных вычислительных устройств в качестве спецвычислителей, производящих обработку избыточных сигналов, поступающих от первичных измерителей информации. 3. Применение линейных либо нелинейных оптимальных алгоритмов обработки, составление программ, решающих задачи оптимальной фильтрации и повышения надёжности отображения полётной информации. В настоящее время разработаны и эксплуатируются на отечественных ВС прецизионные комплексы пилотажно-навигационного оборудования следующих типов: «Ольха» на ВС Як-42, «Пижма» на аэробусе Ил-86, «Купол» на ВС Ил-76 ТД, «Жасмин» на ВС Ту-154 М. На самолетах нынешнего поколения Ту-204, Ил-96, Ту-334 эксплуатируются комплексы стандартного цифрового пилотажно-навигационного оборудования (КСЦПНО). В табл. 1 приведены пилотажно-навигационные параметры, измеряемые с целью получения информации о состоянии ВС, показаны диапазоны измерений и достигнутые точности. Таблица 1 Чувствительных элементов Общие сведения о манометрах Приборы, предназначенные для измерения давления или разности давлений, называются манометрами. Манометры в авиации находят широкое применение для измерения давления воздуха, газов, топлива, масла в силовых установках и так далее. Кроме того, они составляют основу аэрометрических приборов, в которых на основе измерения статического давления и полного давления набегающего воздушного потока определяются высотно-скоростные параметры полета (скорость, высота, число Маха). По роду измеряемого давления различают манометры абсолютного давления, манометры избыточного давления, дифференциальные манометры, вакуумметры, мановакуумметры. В отдельную группу выделяют барометры, предназначенные для измерения атмосферного давления. В зависимости от метода измерений, положенного в основу принципа действия, манометры делятся на механические, электромеханические и электрические. В свою очередь, в каждой из этих групп манометры дополнительно классифицируются в соответствии с используемым чувствительным элементом (ЧЭ). К механическим манометрам относятся жидкостные, грузопоршневые и деформационные манометры. В жидкостных манометрах измеряемое давление уравновешивается весом столба жидкости, а в грузопоршневых – давлением, создаваемым калиброванными грузами, помещенными на поршень. Жидкостные и поршневые манометры широко применяются в лабораториях, но к использованию на воздушных судах они не пригодны из-за влияния на их показания наклонов и ускорений. В деформационных манометрах измеряемое давление определяется по величине деформации упругого ЧЭ, которая с помощью передаточно-множительного механизма преобразуется в перемещение стрелки указателя. В зависимости от типа ЧЭ деформационные манометры подразделяются на трубчато-пружинные, мембранные и сильфонные. Данный тип манометров нашел широкое применение на воздушных судах. К электромеханическим манометрам относятся манометры, в которых деформация упругого ЧЭ преобразуется в изменение электрической величины (обычно R, L или C). Такие манометры являются дистанционными. Они нашли широкое применение на воздушных судах вследствие удобства передачи к потребителям электрических сигналов, пропорциональных измеряемому давлению. В электрических манометрах, как и в электромеханических, происходит преобразование измеряемого давления в электрический сигнал. Отличие заключается в том, что здесь непосредственно используется зависимость физических свойств ЧЭ от приложенного давления, то есть преобразование происходит без применения передаточно-множительного механизма. К ним относятся манометры сопротивления (тензорезисторы), в которых давление определяется значением измеряемого сопротивления; ионизационные манометры, в которых давление определяется по значению ионного тока в контролируемой среде; тепловые манометры, в которых используется зависимость теплопроводности газа от его давления. Особую разновидность манометров составляют манометры с электрическим частотным преобразователем, выдающим сигнал как функцию частоты колебаний резонатора, на который воздействует давление среды. К манометрам относятся также сигнализаторы давления, предназначенные для сигнализации достижения заданной величины давления или отношения двух давлений. Механические манометры Деформационные механические манометры предназначены для измерения давления жидкостей и газов. Их принцип действия основан на зависимости величины деформации упругого ЧЭ от измеряемого давления жидкой или газообразной среды. В качестве упругих ЧЭ в механических манометрах применяются мембраны и мембранные коробки, сильфоны и трубчатые пружины. Мембраны представляют собой тонкую пластину, закрепленную по наружному контуру и способную существенно прогибаться под воздействием измеряемого давления (или разности давлений). Форма профиля мембраны, ее толщина и модуль упругости определяют зависимость величины прогиба мембраны от измеряемого давления. Если две одинаковые мембраны жестко соединить друг с другом по внешнему контуру с помощью сварки или пайки, то получится мембранная (манометрическая) коробка. При подаче во внутреннюю полость коробки давления по ее деформации можно определить величину давления относительно давления снаружи коробки. Если из коробки откачать воздух и запаять входное отверстие, то получится анероидная коробка, предназначенная для измерения абсолютного давления среды, в которую она помещена. Сильфоны представляют собой тонкостенную гофрированную трубку. Если один конец сильфона запаять, а через другой подавать во внутреннюю полость давление, то по деформации сильфона можно определить величину измеряемого давления. Трубчатая пружина представляет собой тонкостенную изогнутую трубку, запаянную с одного конца. Через другой конец во внутреннюю полость подается давление, в результате чего трубчатая пружина начинает распрямляться. Свободный (запаянный) конец в результате этого перемещается, величина перемещения зависит от измеряемого давления. На рис. 2.1 приведены упрощенные схемы механических деформационных манометров с различными чувствительными элементами. Если давление р2 отличается от давления р1, то возникает деформация упругого чувствительного элемента 1. С помощью передаточно-множительного механизма 2 небольшие по величине деформации ЧЭ усиливаются и передаются стрелке указателя 3, которая перемещается относительно предварительно отградуированной шкалы.
Рис. 2.1. Принципиальные схемы механических деформационных манометров с различными ЧЭ: а – с мембранной коробкой; б – с сильфоном; в – с трубчатой пружиной На воздушных судах применяются механические манометры типа МВ, МГ, МК (вторая буква означает воздушные, гидравлические, кислородные), М2А (двухстрелочные) и НТМ (недистанционные теплостойкие). В манометрах НТМ в качестве ЧЭ используется мембрана, в остальных – трубчатая пружина. Различные типы механических манометров обладают разными диапазонами измерения давления. В целом они перекрывают диапазон от 0 до 60 МПа. Как и любые измерительные приборы, деформационные манометры имеют методическую и инструментальную погрешности. Методическая погрешность в манометрах избыточного давления возникает в том случае, если абсолютное давление окружающей среды меняется. В процессе измерения давления важно, чтобы к манометру подводилось давление, окружающее контролируемый агрегат. Что касается инструментальных погрешностей деформационных механических манометров, то они включают в себя несколько составляющих: 1) шкаловая погрешность, причиной появления которой является неполное соответствие шкалы прибора его градуировке. Для стандартной шкалы причиной шкаловой погрешности является неточная регулировка механизма манометра под шкалу; 2) погрешность, вызванная трением в подвижных частях передаточно-множительного механизма. При вибрации воздушного судна в полете данная погрешность уменьшается; 3) погрешности, вызванные люфтами и неточной балансировкой подвижных частей; 4) в случае длительного использования манометра может возникать погрешность, вызванная гистерезисом чувствительного элемента; Примечание. Все эти составляющие инструментальной погрешности конструктивными мерами можно свести до допустимых значений. 5) важной составляющей является температурная погрешность, причиной появления которой является изменение упругих свойств ЧЭ с температурой. С помощью специальных термокомпенсаторов эта составляющая погрешности может быть также снижена до допустимых значений. Измерители температуры Температуры газового потока Приборы, предназначенные для измерения температуры, называются термометрами. Они применяются на воздушных судах для получения информации о тепловых режимах работы двигателя, о работе системы терморегулирования и вентиляции, а также для определения температуры наружного воздуха и воздуха в различных отсеках воздушного судна. Диапазоны измерения температуры во всех этих случаях отличаются большим разнообразием. Например, при измерении температуры газов в газотурбинных двигателях – до 1500 °С, температуры масла – от –50 до 150 °С, температуры наружного воздуха – ±60 °С. Решить все эти задачи, используя один тип термометров невозможно. По методу измерения температуры и принципу действия ЧЭ выделяют электрические термометры сопротивления, термоэлектрические термометры, термометры расширения (жидкостные, дилатометрические, биметаллические), пирометры. В термометрах сопротивления используется свойство металлов и полупроводников изменять свое сопротивление в зависимости от их температуры. Термоэлектрические термометры основаны на явлении возникновения термоЭДС при нагреве участка контакта двух разнородных проводников и зависимости величины термоЭДС от температуры контакта. В термометрах расширения используется зависимость от температуры удельного объема жидкости (жидкостные термометры) или твердого тела (дилатометрические термометры), а также изменение формы биметаллической пластины при изменении ее температуры. В пирометрах используется зависимость параметров теплового излучения нагретого тела от его температуры. Наиболее широкое применение в авиации нашли первые два типа термометров, два последних типа практически не применяются.
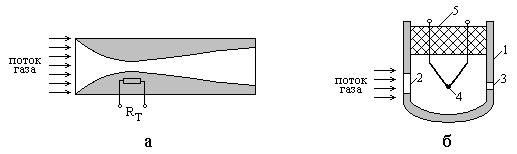
При измерении температуры газов, движущихся с большими скоростями, возникают погрешности, обусловленные торможением потока в зоне датчика и переходом при этом кинетической энергии газа в тепловую. В результате температура последнего будет выше статической температуры газа. На рис. 2.5 представлена зависимость избыточной температуры Δ Т от скорости набегающего потока газа. Из графика видно, что заметное отличие статической температуры от температуры, измеряемой термометром, помещенным в газовый поток, проявляется лишь при скоростях, превышающих 100 м/с. Для уменьшения влияния скорости потока на результат измерения температуры стремятся или стабилизировать скорость газа, или существенно понизить ее в зоне расположения термочувствительного преобразователя. В первом случае термочувствительный преобразователь RT (никелевая проволока, намотанная на медный цилиндр) помещается в узкое сечение сопла Лаваля (рис. 2.6, а). При скорости полета самолета, соответствующей числу Маха М ≥ 0, 4, в узком сечении сопла устанавливается критический режим, при котором скорость течения воздуха примерно равна местной скорости звука в воздухе. Это дает возможность по измеренной температуре термочувствительного преобразователя Ттп определить статическую температуру воздуха Тс:
где N – коэффициент качества термопреобразователя, равный 0, 978.
Рис. 2.6. Приемники температуры газового потока: а – с соплом Лаваля; б – с камерой торможения В другом случае термочувствительный преобразователь (обычно термопара) помещается в камеру торможения (см. рис.2.6, б). Камера торможения представляет собой жаропрочный корпус 1, внутри которого с помощью термоизолятора 5 закреплена термопара 4. Корпус имеет одно отверстие малого диаметра и одно или два отверстия большого диаметра. Набегающий газовый поток входит в камеру через отверстие 2 большого диаметра, тормозится там, медленно обтекая термопару, и выдавливается через отверстие 3 малого диаметра. По измеренной температуре термочувствительного преобразователя Ттп можно определить статическую температуру воздуха Тс:
где r – коэффициент торможения, равный 0, 92 – 0, 96 при соотношении площадей входного и выходного отверстий не менее 5. Термометры сопротивления Электрические термометры сопротивления применяют на воздушных судах для измерения температуры масла и воздуха внутри и снаружи кабины. Принцип действия этих термометров основан на зависимости сопротивления металлов и полупроводников от их температуры. Для металлических проводников зависимость электрического сопротивления от температуры в небольшом диапазоне изменения температуры линейна и описывается выражением
где R0 – сопротивление при температуре 0 °С; α – температурный коэффициент сопротивления (ТКС); Δ t – приращение температуры. Основными металлами при изготовлении термометров сопротивления являются медь, никель, железо и платина, имеющие большое значение ТКС. Для меди ТКС равен 0, 004 К-1, для железа и никеля значение ТКС равно 0, 006 К-1. Важно при этом, чтобы металлы были чистые, так как наличие примесей приводит к снижению ТКС. Медные терморезисторы применяют для измерения температур до 150 °С, так как при более высоких температурах медь окисляется. Этот же недостаток присущ и железу. Поэтому в термометрах сопротивления наиболее широкое применение нашли ЧЭ из никелевой проволоки, позволяющие измерять температуру газов и жидкостей в диапазоне –70…+150 °С. Погрешность измерения таких термометров, как правило, не превышает ± 3 %. Для более точного измерения температуры в диапазоне до 1000 °С используют платиновые термометры сопротивления. Для полупроводниковых терморезисторов характерна нелинейная зависимость сопротивления от температуры, описываемая выражением
где А и В – коэффициенты, зависящие от материала полупроводника и его геометрии. У полупроводниковых терморезисторов ТКС отрицателен и существенно меняется с температурой. Так при температуре 20 °С он по абсолютной величине на порядок выше, чем у металлических терморезисторов. Пределы измерения у них обычно 0…+120 °С, погрешность при нормальных условиях в рабочем диапазоне не превышает ± 2 °С. Такие терморезисторы в основном используются в системах регулирования температуры. В авиации нашли применение несколько типов термометров: термометры унифицированные электрические (ТУЭ) и индикаторы температуры (ИТ), в которых в качестве термочувствительных элементов используются металлические терморезисторы, а также термометры типа ТП с полупроводниковым термопреобразователем. В комплект любого авиационного термометра кроме приемника температуры (термопреобразователя) входит также показывающий прибор (указатель). В качестве указателя обычно используются магнитоэлектрические логометры с неподвижными катушками и подвижным постоянным магнитом. Схема такого логометра аналогична той, что используется в электромеханических манометрах типа ЭДМУ и ДИМ (см. рис. 2.2). Общие сведения о тахометрах Важным параметром режима работы авиационного двигателя является частота вращения вала его винта, компрессора или турбины. Этот параметр характеризует не только техническое состояние двигателя, но, главным образом, режим его работы. От него существенно зависит тяга (мощность), развиваемая двигателем. Поэтому частота вращения вала должна измеряться с достаточно высокой точностью (на уровне 0, 5 – 1, 0 %). Приборы, предназначенные для измерения частоты вращения, называются тахометрами, а соответствующие датчики с электрическим выходным сигналом – тахогенераторами. По принципу действия можно выделить тахометры центробежные, генераторные, магнитоиндукционные и частотно-импульсные. В центробежных тахометрах используется зависимость центробежных сил инерции вращающихся масс от частоты вращения вала. В них центробежные силы инерции уравновешиваются силой, возникающей при деформации пружины. Генераторные тахометры основаны на зависимости величины генерируемого в обмотках напряжения постоянного или переменного тока от частоты вращения индуктора, связанного с валом. Магнитоиндукционные тахометры основаны на взаимодействии магнитного поля, вращающегося с измеряемой угловой скоростью, с полем вихревых токов, наводимых при этом в ЧЭ, в качестве которого выступают проводящие диск или цилиндр. В частотно-импульсных тахометрах используется зависимость частоты переменного напряжения, возникающего в синхронном генераторе, ротор которого жестко связан с вращающимся объектом, от частоты его вращения. Возможно применение вместо синхронного генератора фотоэлектрических, индукционных и других преобразователей для формирования последовательности электрических импульсов. В авиации наибольшее распространение получили магнитоиндукционные тахометры, тахогенераторы постоянного и переменного тока и частотно-импульсные датчики частоты вращения. Чувствительные элементы Гироскопы находят исключительно широкое применение в самых разных областях техники, а именно, в авиации и на морских судах, в ракетостроении и на космических кораблях, при прокладке туннелей и бурении нефтяных скважин. В авиации гироскопы применяются, в частности, для определения пространственного положения воздушного судна относительно плоскости горизонта или для определения курса самолета. |
Последнее изменение этой страницы: 2019-10-03; Просмотров: 231; Нарушение авторского права страницы
 ã Ульяновск, УВАУ ГА, 2007
ã Ульяновск, УВАУ ГА, 2007 набегающего потока воздуха.
набегающего потока воздуха.
 , минимальная Vmin доп и максимальная Vmax доп допустимые скорости движения ВС.
, минимальная Vmin доп и максимальная Vmax доп допустимые скорости движения ВС.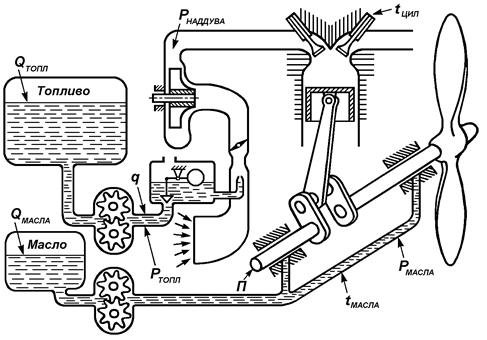
 б
б
 в
в
 г
г
 д
д
 ,
,  , (1.1)
, (1.1) ,
,  – первые производные, угловые скорости рысканья, крена и тангажа соответственно.
– первые производные, угловые скорости рысканья, крена и тангажа соответственно. :
:  (
(  ) sec J,
) sec J,  , (1.2)
, (1.2) .
. ;
;  ;
;  . (1.3)
. (1.3)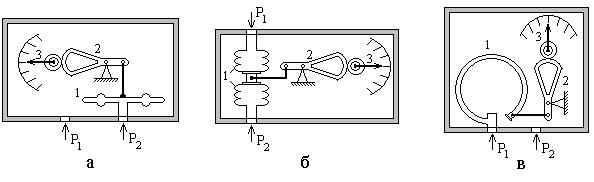
 Процесс измерения температуры в общем случае предусматривает соприкосновение ЧЭ термометра с измеряемой средой. В результате возникающего теплообмена между средой и ЧЭ температура последнего приближается к температуре среды. При установившемся режиме температура ЧЭ, как правило, отличается от температуры среды, то есть измерение температуры всегда сопровождается систематической методической погрешностью, которая зависит от состояния среды и поверхности ЧЭ, от его конструкции и размеров, теплопроводности и теплоотдачи.
Процесс измерения температуры в общем случае предусматривает соприкосновение ЧЭ термометра с измеряемой средой. В результате возникающего теплообмена между средой и ЧЭ температура последнего приближается к температуре среды. При установившемся режиме температура ЧЭ, как правило, отличается от температуры среды, то есть измерение температуры всегда сопровождается систематической методической погрешностью, которая зависит от состояния среды и поверхности ЧЭ, от его конструкции и размеров, теплопроводности и теплоотдачи.