
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Системы координат, используемые в процессе
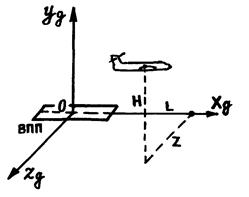
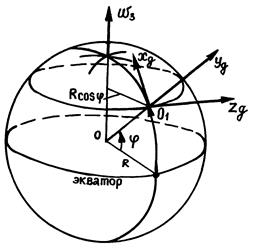
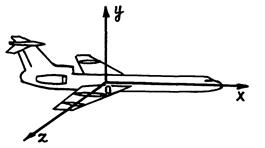
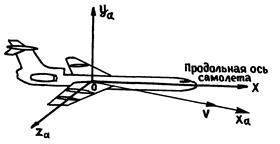
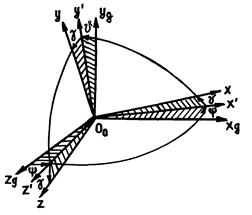
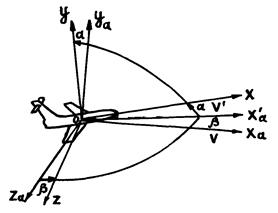
Измерения параметров полёта Положение ВС в пространстве принято определять, используя три системы координат: земную, связанную и скоростную. Целесообразность выбора конкретной системы координат определяется в каждом отдельном случае в зависимости от решаемых вопросов. При рассмотрении движения ВС в качестве отсчетной обычно выбирают систему координат, связанную с земными ориентирами: вертикалью места, меридианом или осевой линией ВПП – так, как показано на рис 1.3, а. Начало земной системы координат совмещают, например, с точкой исполнительного старта на ВПП или с точкой местоположения ВС на земной поверхности при выполнении полёта. Ось ОУ g направляют по истинной вертикали места. Плоскость ОХg Zg при этом будет совмещена с плоскостью горизонта, ось ОХg может быть направлена по осевой линии ВПП или на север. Оси связанной системы координат OXYZ (см. рис. 1.3, б) совпадают с осями эллипсоида инерции ВС. Начало координат помещается в центре масс самолёта, ось ОХ направлена по его продольной оси, ось ОУ – по нормальной оси и лежит в плоскости продольной симметрии ВС, ось О Z – боковая, лежит в боковой плоскости OXZ. Скоростная система координат ОХа Yа Zа (см. рис. 1.3, в), ось ОХа которой совмещена с вектором истинной воздушной скорости, необходима для получения аэродинамических характеристик обтекания ВС, в частности, углов атаки aи скольжения b. Ось OYa лежит в плоскости продольной симметрии, а ось OZa перпендикулярна плоскости OXaYa. Движение самолёта в пространстве по отношению к выбранной земной системе координат можно представить состоящим из движения вокруг центра масс (вращательного) и движения центра масс (поступательного). Так как в каждом из этих движений самолёт обладает тремя степенями свободы, то в целом он имеет шесть степеней свободы.
Рис. 1.3. Система координат и углы Эйлера: а - земная система координат; б - связанная система координат; в - скоростная система координат; г - к образованию углов рысканья, тангажа и крена путем трех последовательных поворотов; д - к образованию углов скольжения и атаки Для определения положения самолёта в пространстве необходимо знать шесть координат: три линейных и три угловых. Эти шесть координат как функции времени являются параметрами движения самолёта. Линейные параметры Xg, Yg, Zg характеризуют положение центра масс самолёта относительно выбранной земной системы координат (см. рис. 1.3, а). В данном случае по оси О Xg определяется пройденное расстояние по заданной линии пути, по оси ОУ g – высота полёта и по оси О Zg – боковое уклонение. Их первые и вторые производные представляют соответственно линейные скорости и ускорения центра масс. Параметры y, J, gхарактеризуют угловое положение ВС относительно земной поверхности. Иначе говоря, угловые параметры характеризуют положение связанной с самолётом системы координат OXYZ относительно земной системы OXgYgZg (см. рис. 1.3, г). Угол yназывается углом рысканья. Это угол между осью О Xg и проекцией ОХ¢ продольной оси самолёта ОХ на горизонтальную плоскость. Угол y считается положительным, если продольная ось самолёта повернута влево от линии пути. Угол J называется углом тангажа. Это угол между продольной осью самолёта ОХ и плоскостью горизонта. Он считается положительным, если продольная ось самолёта повернута вверх от плоскости горизонта. Угол gназывается углом крена. Он заключен между плоскостью симметрии самолета XOY и вертикальной плоскостью, проходящей через продольную ось самолёта. Угол крена считается положительным, если опущено правое крыло и приподнято левое. Образование углов y, J, g можно продемонстрировать путём трех последовательных поворотов ВС и его связанной системы координат относительно центра масс. Пусть имеем земную систему координат OXgYgZg (см. рис. 1.3, г). В исходном положении совместим связанную систему координат с земной. Повернем связанную систему координат вокруг оси О Yg на угол y.Связанная система координат принимает в этом случае положение OX ¢ YgZ ¢ . Второй поворот производим вокруг оси О Z¢ на угол J. После этого поворота связанная система координат занимает положение OXY ¢ Z¢. После третьего поворота вокруг оси ОХ на угол g связанная система координат занимает положение OXYZ. Представленная на рис. 1.3, г картина трёх последовательных поворотов даёт возможность вывести известные кинематические уравнения Эйлера:
где wx, wy, wz – угловые скорости ВС относительно соответствующих осей;
Из системы уравнений (1.1) легко определяются соотношения, позволяющие при выполнении полёта вычислять угловые координаты ВС по измеренным угловым скоростям
Положение связанной системы относительно скоростной системы координат определяется двумя аэродинамическими параметрами – углом атаки a и углом скольжения b(см. рис. 1.3, д). Углом атаки называется угол между проекцией V ¢ вектора истинной воздушной скорости на плоскость симметрии самолёта XOY и продольной осью самолёта ОХ. Углом скольжения bназывается угол между вектором истинной воздушной скорости и продольной плоскостью симметрии ВС. В частном случае, когда b = 0, угол атаки есть угол между вектором истинной воздушной скорости и продольной осью ВС. Показанные на рис. 1.3, д два последовательные поворота на углы b и aпозволяют совместить скоростную систему координат со связанной, а также определяют составляющие вектора скорости ВС по осям ОХ, OY, OZ:
|
Последнее изменение этой страницы: 2019-10-03; Просмотров: 199; Нарушение авторского права страницы
 б
б
 в
в
 г
г
 д
д
 ,
,  , (1.1)
, (1.1) ,
,  – первые производные, угловые скорости рысканья, крена и тангажа соответственно.
– первые производные, угловые скорости рысканья, крена и тангажа соответственно. :
:  (
(  ) sec J,
) sec J,  , (1.2)
, (1.2) .
. ;
;  ;
;  . (1.3)
. (1.3)