
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Момент силы относительно произвольного центра, оси.
Величина (модуль) момента равен силы (2). Если
 в данном случае не играет никакой роли (рис 4). Действительно, если вектор в данном случае не играет никакой роли (рис 4). Действительно, если вектор  приложен в точке В на той же прямой, то приложен в точке В на той же прямой, то
Рис 4 и так как векторное произведение
 , где H-кратчайшее расстояние от линии действия силы до выбранной точки О (его часто называют, и не без основания, плечом силы). Тогда можно дать ещё одно определение момента силы. Моментом силы относительно точки назовем вектор, равный по величине произведению силы на кратчайшее расстояние линии действия ее до точки и направленный , где H-кратчайшее расстояние от линии действия силы до выбранной точки О (его часто называют, и не без основания, плечом силы). Тогда можно дать ещё одно определение момента силы. Моментом силы относительно точки назовем вектор, равный по величине произведению силы на кратчайшее расстояние линии действия ее до точки и направленный по перпендикуляру к плоскости, содержащей силу и точку, в ту сторону, откуда, вращение тела силой представляется происходящим против хода часовой стрелки (3). Обратимся теперь к определению момента силы относительно оси (рис 5). Спроектируем силу 1) если линия действия силы пересекается с осью и 2) если линия действия силы параллельна оси, т.е.- если сила и ось лежат в одной плоскости (6). Приняв указанное определение момента силы относительно оси, легко показать, что проекция вектора момента силы относительно некоторой точки на ось, проходящую через точку, равна моменту силы относительно этой оси (7). Для доказательства заметим, что модуль вектора момента Величина (модуль) момента равен (8),
где α - угол между векторами Легко видеть, что по численной величине момент силы относительно точки равен удвоенной площади треугольника, построенного на силе как на основании и на центре момента как на вершине. Аналитические выражения моментов силы относительно осей координат (9):
М x ( М y ( М z ( Система сходящихся сил.
или в проекциях на оси координат
Вопросы для самопроверки. 1. Напишите векторную формулу момента силы относительно точки. 2. Чему равен модуль момента силы относительно точки? 3. Прочтите ещё раз определение момента силы относительно точки. 4. Что такое момент силы относительно оси? 5. Как определяется знак момента силы относительно оси? 6. Когда момент силы относительно оси равен нулю? 7. Связь между моментом силы относительно оси и проекцией вектора момента силы на ось. 8. Чему равен модуль момента сил? 9. Чему равны проекции момента сил на оси координат? 10. Необходимым и достаточным условием равновесия сходящейся системы сил
Практическое занятие 1 Очень важно правильно расставить реакции связей, иначе написанные уравнения окажутся неверными. Ниже приведены примеры замены связей их реакциями. На примерах 1.1–1.8 показаны правила замены связей реакциями сил, расположенных в плоскости.
а – тело весом G на гладкой поверхности; б – действие поверхности заменено реакцией – силой R; в – в точке А связь «опорная точка» или ребро; г – реакции направлены перпендикулярно опираемой или опирающейся плоскостям
Пример 1.1
Реакция гладкой поверхности всегда направлена по нормали к этой поверхности (пример 1.1). Реакция «невесомого» троса (нити, цепи, стержня) всегда направлена вдоль троса (нити, цепи, стержня) (пример 1.2).
а – балка висит на двух тросах; б – действие тросов заменено силами Т1 и Т2; в – связь «идеальный стержень»; г – связь «идеальная нить»
Пример 1.2
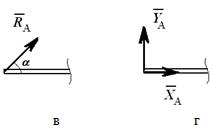
Шарнирно-неподвижная опора может изображаться по-разному (пример 1.3, а или 1.3, б). Она может быть заменена либо силой R с углом α (пример 1.3, в), либо двумя силами, например, XA и YA (рисунок 1.3, г).
пример 1.3
Всегда можно перейти от R и α к XA и YA (и наоборот):
X A = Rcosα; Y A = Rsinα;
Шарнирно-подвижная опора (пример 1.4, а) допускает (в данном случае) горизонтальное перемещение и не допускает вертикальное. Реакция направлена по нормали к опорной поверхности (пример 1.4, б).
Пример 1.4
Связи шарнирно-неподвижной опоры в точке A и шарнирно-подвижной опоры в точке B отброшены (пример 1.5, б), их действие заменено силами XA , YA и RB .
Пример 1.5
Соединение стержня и втулки в плоскости (пример 1.6) – скользящая заделка. Отбросим втулку – получим действие на стержень силы RD и MD момента.
Пример 1.6
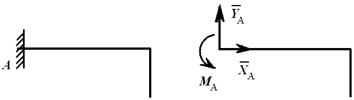
На примере 1.7, а изображена скользящая заделка. В плоскости данная опора допускает поступательное перемещение стержня как по горизонтали, так и по вертикали, но препятствует повороту (в плоскости). Реакцией такой опоры будет момент MC (пример 1.7, б).
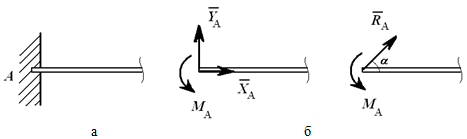
Пример 1.7 Консоль (глухая или жесткая заделка) не допускает никакого перемещения детали. Реакцией такой опоры являются неизвестная по величине и направлению сила RA с углом α (или XA и YA ) и момент ΜA (пример 1.8).
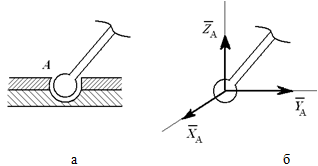
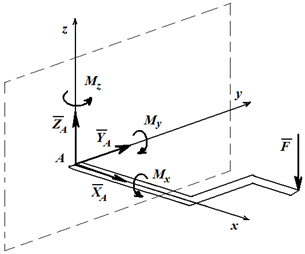
Пример 1.8 На примерах 1.9 – 1.15 показаны примеры замены сил, расположенных в пространстве, их реакциями. Шарнирно-неподвижная опора, или сферический шарнир (пример 1.9, а), заменена системой сил (пример 1.9, б) XA , YA и ZA , т.е. силой, неизвестной по величине и направлению.
Пример 1.9
На примере 1.10, а показан вал, закрепленный в опорах: в точке A – подпятник или стакан, в точке B – втулка или подшипник. Действие опор заменено силами XA , YA , ZA и XB , ZB (пример 1.10, б).
Пример 1.10
На примерах 1.11 и 1.12 приведены примеры замены различных связей их реакциями.
Пример 1.11
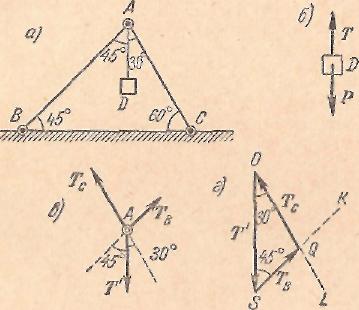
Задача. Задача. Два абсолютно жестких стержня АВ и АС соединены шарниром в точке А и прикреплены к полу шарнирами В и С, образуя с полом соответственно углы 45° и 60° (рис. а). К валику шарнира А подвешен на нерастяжимой нити груз Д вес которого 100н. Определить усилия, возникающие в стержнях АВ и АС. Весом стержней пренебречь.
Решение. Для определения усилий в стержнях АВ и АС следует рассмотреть равновесие шарнира А. Однако непосредственно приступить к исследованию равновесия узла А невозможно, так как они находятся в равновесии под действием трех неизвестных сил: реакций стержней АВ и АС и реакции нити AD. Поэтому для определения реакции нити предварительно рассмотрим равновесие груза D. Груз D находится в равновесии под действием двух сил: веса Р и и реакции нити Т. Эти силы направлены в противоположные стороны (рис б) Учитывая условие равновесия груза, получим, что Т=Р=100н. реакция нити Т, направленная по вертикали вниз (на основании закона равенства действия и противодействия). Реакции Тв и Тс стержней АВ и АС направлены вдоль стержней на рис. б эти три силы изображены приложенными в шарнире А (в общем случае трудно заранее указать, направлены ли силы Тв и
Тс вдоль стержней вверх или вниз; это будет уточнено в ходе последующего решения задачи).
При равновесии шарнира А равнодействующая этих сил должна быть равна нулю, следовательно, силы Т, Тв и Тс образуют замкнутый силовой треугольник. Построение силового треугольника (рис г) начнем с силы Т, известной по величине и по направлению. Взяв произвольную точку О, приложим к ней силу Т. Затем, проведя через начало и конец силы Т прямые OL и SK, соответственно параллельные стержням АС и АВ, получим в пересечении третью вершину Q силового треугольника OSQ. Изобразив на сторонах треугольника SQ и QO стрелки так, чтобы сумма трех сил Т, Тв и Тс равнялась нулю (в каждой из вершин силового треугольника OSQ должен быть расположен конец только одной из трех сил),.-получим направления реакций Тв и Тс. Применив теорему синусов, получим
Подставив численные значения, находим: Тв= 51,8н, Тс = 13,2н.
двух опорах В и D, причем опора В расположена на катках. На конце А к балке приложена вертикальная сосредоточенная сила F=8 т. На участке CD на балке находится равномерно распределенная нагрузка интенсивности q= 0,5 т/м (интенсивностью называется величина силы, действующей на единицу длины). На участке АВ и балке приложена пара сил с моментом m = 6 тм. Определить опорные, реакции в В и D. Размеры указаны на рисунке. Решение. Рассмотрим равновесие балки A, на балку, действуют активные силы: вес балки Р, приложенный в её середине, сила F, равнодействующая распределенной нагрузки Q=q×CD=1т и пара сил с моментом m. Применив закон освобождаемости от связей, направим опорные реакции вверх Rb и Rd. В этом случае не только сумма всех сил должна равняться нулю, но и момент всех сил относительно выбранного центра должен быть равен нулю. Составим уравнения равновесия
Считая АВ=ВС=СD=2м, находим Rb=13.75т, Rd=-0.75т. Отрицательное значение реакции указывает, что направление Rd противоположно выбранному. Для самостоятельной подготовки к контрольной работе рекомендуется решить следующие задачи из задачника И.В. Мещерского «Сборник задач по теоретической механике» : 2.10;2.30; 2.39;2.48. В качестве «помощника» рекомендуем «решебник» М.И. Бать, Г.И. Джанелидзе, А.С.Кельзон «Теоретическая механика в примерах и задачах» , том1.
Лекция 2 Пара сил и её свойства. Рассмотрим две силы
(рис. 6)(1). Сумма этих двух сил равна нулю, а момент?
или
Перечислим основные свойства пары сил как свободного вектора: Пару сил можно переносить в плоскости действия, пару сил можно переносить в плоскость параллельной исходной(3). Из формулы (1.2) следует, что, оставляя неизменным один из сомножителей, можно менять два остальные, сохраняя при этом значение момента пары: так, например, оставляя неизменным угол α, можно пропорционально изменить величины АВ и F(4). Совокупность пар, как угодно расположенных в пространстве, статически эквивалентна одной паре с моментом, равным векторной сумме моментов слагаемых пар. Это обозначает: чтобы сложить моменты нескольких пар, надо сложить векторно их моменты по правилу параллелограмма или векторного многоугольника(5). Здесь следует отметить, что, если две пары имеют одинаковый момент, нельзя говорить, что они равны, их действие на тело статически эквивалентно. Пара сил, вообще говоря, является искусственным элементом, так как подобрать равными и параллельными две силы можно только с точностью измеряющих эти величины приборов, но введение её как элемента момента силы будет полезно при дальнейшем изложении материала. Вопросы для самопроверки. 1. Что такое пара сил? 2. Почему момент пары сил свободный вектор? 3. Можно ли пару сил переносить в другую плоскость? 4. Можно ли менять параметры пары сил, если да, то как? 5. Как сложить действие нескольких пар?
|
Последнее изменение этой страницы: 2019-06-09; Просмотров: 281; Нарушение авторского права страницы

 (1.1)
(1.1) , где α - угол между векторами
, где α - угол между векторами  , соединяющему центр моментов с точкой приложения
, соединяющему центр моментов с точкой приложения





 .
.
 на плоскость П, перпендикулярную к этой оси (отрезок ab), и возьмем момент проекции силы
на плоскость П, перпендикулярную к этой оси (отрезок ab), и возьмем момент проекции силы  , а момент силы относительно оси ОZ равен, по определению, двум площадям треугольника Оав -
, а момент силы относительно оси ОZ равен, по определению, двум площадям треугольника Оав -  , но
, но  , что и требовалось доказать. Полученный результат позволяет, там, где необходимо, считать момент силы относительно оси и не считать проекцию вектора момента силы на ось.
, что и требовалось доказать. Полученный результат позволяет, там, где необходимо, считать момент силы относительно оси и не считать проекцию вектора момента силы на ось. )= yFz – zFy ;
)= yFz – zFy ;  Сходящимися называются силы, линии действия которых пересекаются в одной точке. Равнодействующая сходящихся сил равна геометрической сумме этих сил и приложена в точке их пересечения
Сходящимися называются силы, линии действия которых пересекаются в одной точке. Равнодействующая сходящихся сил равна геометрической сумме этих сил и приложена в точке их пересечения  . Равнодействующая может быть найдена геометрическим способом – построением силового (векторного) многоугольника или аналитическим способом, проектируя силы на оси координат. Необходимым и достаточным условием равновесия сходящейся системы сил является равенство нулю суммы всех сил (10)
. Равнодействующая может быть найдена геометрическим способом – построением силового (векторного) многоугольника или аналитическим способом, проектируя силы на оси координат. Необходимым и достаточным условием равновесия сходящейся системы сил является равенство нулю суммы всех сил (10) 
 .
.





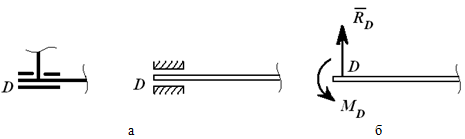







 Задача. Консольная балка AD весом Р=4т лежит на
Задача. Консольная балка AD весом Р=4т лежит на


 . Момент таких двух сил не зависит от выбранного центра, то есть вектор
. Момент таких двух сил не зависит от выбранного центра, то есть вектор  является свободным: его можно переносить как угодно в пространстве, не изменяя его величины и направления(2). Кратчайшее расстояние между силами h называют плечом пары сил. Численно момент пары равен
является свободным: его можно переносить как угодно в пространстве, не изменяя его величины и направления(2). Кратчайшее расстояние между силами h называют плечом пары сил. Численно момент пары равен (1.2)
(1.2)