
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Уравнения равновесия тела.
Будем считать, что если взаимное положение тел и их положение относительно выбранной неподвижной системы координат остаётся неизменным, то тело или система тел находятся в равновесии. В п.4 предыдущего параграфа сказано, что произвольная система сил может быть приведена к двум непересекающимся силам. Пусть Два векторных условия (1.6) могут быть в общем случае приведены к шести алгебраическим уравнениям; для этого надо спроектировать левые части этих уравнений на три оси координат, произвольно выбранные в пространстве. Тогда при принятых обозначениях будем иметь следующие шесть уравнений (2): которые выражают следующее положение: при равновесии твердого тела под действием пространственной системы сил суммы проекций приложенных сил на оси координат и суммы моментов приложенных сил относительно осей координат равны нулю. При изучении условий равновесия данного тела оно рассматривается как свободное, для чего оно мысленно выделяется из общей цепи взаимодействующих тел. Действие других тел заменяется реакциями связей, поэтому в уравнения равновесия входят как задаваемые (активные) силы так и реакции связей. В отдельных частных случаях некоторые из этих шести уравнений могут выполняться тождественно; при этом число уравнений равновесия уменьшается. Отметим важнейшие из этих частных случаев. 1. Сходящаяся система сил (3). Выбирая точку, в которой сходятся линии действия сил, за центр моментов, заметим, что уравнения моментов тождественно обратятся в нуль, так как линии действия сил пересекут оси координат, число уравнений равновесия сокращается до трех уравнений проекций на оси координат. 2. Плоская система сил (4). Расположим ось OZ перпендикулярно к плоскости действия сил. Тогда три уравнения тождественно обратятся в ноль (см. п.1 предыдущего параграфа) и станутся три уравнения 3. Равновесие системы тел (плоская система сил). В статике часто встречаются задачи, в которых число неизвестных реакций больше чем три. В этом случае для решения задачи необходимо учитывать наличие внутренних шарниров ( не путать с реакциями шарниров). Если Ν-К=3, где N-число неизвестных реакций, К-число внутренних шарниров, то задача называется статически определимой и может быть решена методами статики твёрдого тела (5). Для статически неопределимых задач надо записать дополнительные условия, чтобы число неизвестных уравнений было равно числу неизвестных. Поскольку этот параграф является основным в разделе статика, уместно в лекции рассмотреть подробно два примера.
Решение. 1. Необходимо освободиться от связей, заменив их соответствующими реакциями. На рис. все эти три реакции показаны (Т,Nв,Rс). Выбрать систему координат. Следует направить оси так, чтобы наибольшее число сил проектировалось в «полный рост». Выбрать начало координат в точке, относительно которой уравнение моментов запишется в наиболее простом виде. В нашей задаче все эти 3 условия выполнены. Так как имеем дело с плоской задачей, необходимо записать три уравнения равновесия.
Имеем 3 уравнения с тремя неизвестными. Из последнего уравнения определяем Rс=100
ЗАДАЧА 2. Механическая система состоит из 2-х балок ВС и АС, соединённых между собой цилиндрическим шарниром С. В точке А балка СА закрепляется в вертикальной стенке с помощью жёсткой заделки, в точке В – с помощью невесомого стержня ВD. Система нагружена равномерно распределённой нагрузкой интенсивностью q, парой сил с моментом М и силой Р1. Определить реакции в точках А, В, С. Весом балок и трением в шарнирах пренебречь. Дано:
В последней строке стоят имена данных для символьных вычислений.
Составить уравнения для частей и целой конструкции в виде
ABC | |||||||||||||||||||||||||||||||||||||||||||
| Vx=0 | Vy=0 | Mc=0 | Vx=0 | Vy=0 | Mc=0 | Vx=0 | Vy=0 | Mc=0 | |||||||||||||||||||||||||||||||||||
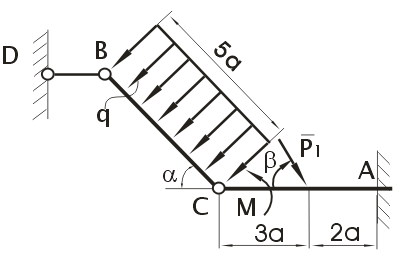
Рис. 1
Рассмотрим равновесие каждого из тел системы.
Балка ВС (рис. 2)

|

|

|
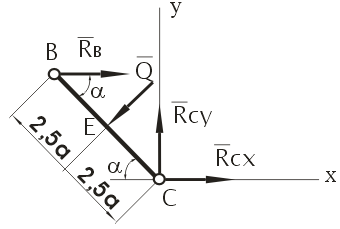
Рис. 2
На балку действуют:
- равнодействующая Q равномерно распределённой нагрузки в точке Е; модуль силы равен Q = 5q×a = 5 × 4,8 × 1,2 = 28,80; (Н)
-  реакцию невесомого стержня XB и составляющие XC, YC реакции цилиндрического шарнира направим положительно.
реакцию невесомого стержня XB и составляющие XC, YC реакции цилиндрического шарнира направим положительно.
Поскольку балка ВС находится в равновесии, то выполняются следующие условия:
1) VX = XB + XC – Q × sin a = 0,
2) VY = YC – Q × cos a = 0,
3) MC= Q × 2,5a – XB× 5a× sin a = 0.
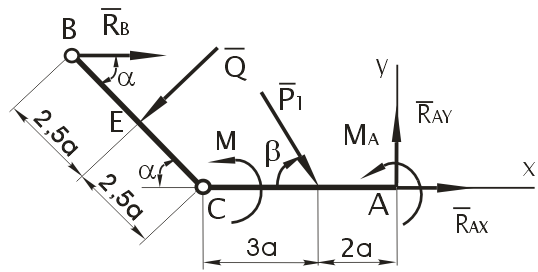
Балка СА (рис. 3)

|

|
|
|
|
|

Рис. 3
На балку действуют: сила Р1 и момент М;
в точке А – реакции XA, YA и момент МА жёсткой заделки направим положительно в точке С – реакции XC, YC цилиндрического шарнира согласно третьему закону Ньютона направим противоположно соответствующим реакциям балки ВС.
Поскольку балка ВС находится в равновесии, то выполняются следующие условия:
4) VX = XA – XC + P1×cosb = 0,
5) VY = YA – YC – P1× sin b = 0,
6) MC= M + MA – (P1× sin b) × 3a + YA× 5a = 0.
Проверка
Для проверки полученных результатов необходимо составить уравнения равновесия всей системы и подставить туда решения. Если суммы обратятся в ноль, то решение верно.
|
|
|
|
7) VX = XB – Q × sin a+XA + P1×cosb= 0 ?,
8) VY = YA – Q × cos a – P1× sin b = 0 ?,
9) MC= Q× 2,5a – XB× 5a×sina+M + MA – (P1×sinb) × 3a + YA× 5a = 0
Вопросы для самопроверки.
1. Необходимое и достаточное условие равновесия твердого тела (векторная форма).
2. Необходимое и достаточное условие равновесия твердого тела (в проекциях на оси координат).
3. Напишите уравнения равновесия сходящейся системы сил.
4. Напишите уравнения равновесия плоской системы сил.
5. Что такое статически определимая задача (на примере плоской задачи)
Практическое занятие 3
| m |
| F |
| К |
| m |
| F |
| C |
| D |
| α |
| β |
| Е |
| А |
| В |
Параллелепипед нагружен силой F и моментом m.
1. Докажите, что они не уравновешены.
2. Обозначьте вершины, углы и оси.
3. Поставьте определимые связи:
4. сферический и цилиндрический шарниры, стержень на двух шарнирах.
5. Запишите уравнения равновесия тела
| К |
| x |
| XA |
| y |
| YA |
| ZA |
| z |
| m |
| F |
| А |
| В |
| C |
| D |
| E |
| α |
| β |
Решение.
1. Сила и момент не могут быть уравновешенными, поскольку в точке приложения силы главный вектор системы равен силе F, а главный момент - моменту m и оба не равны нулю.
2. Обозначим углы α и β и вершины А,В,Е, в которых будем ставить связи. Добавим обозначения вершин С и D для обозначения размеров тела.
3.
| К |
| XE |
| ZE |
| x |
| XA |
| y |
| YA |
| ZA |
| z |
| S |
| m |
| F |
| А |
| В |
| C |
| D |
| E |
| α |
| β |
В точке Е поставим цилиндрический шарнир. Чтобы связи остались определимыми, нужно направить его ось так, чтобы его реакция не могла пройти через вершину А. Реакция цилиндрического шарнира направлена произвольно в плоскости, перпендикулярной оси шарнира. Поэтому его ось не может быть перпендикулярной прямой АЕ. Иначе связи станут избыточными в направлении АВ и недостаточными для поворота вокруг оси, перпендикулярной АЕ. Направим ось цилиндрического шарнира вдоль оси у.
Осталось поставить стержень на шарнирах в вершине В. Его нельзя направить в плоскости АВЕ. Иначе он будет избыточным в своем направлении и не удержит тело от поворота вокруг АЕ. Направим стержень вдоль оси у.
4. Геометрический способ
Уравнения проекций не вызывают затруднений
Vx: 
Vy: 
Vz: 
При вычислении моментов сил пользуемся простым алгоритмом.
Сначала интересуемся, не равен ли момент силы нулю (сила параллельна или пересекает ось). Например, F пересекает ось у.
Если ответ отрицательный, то смотрим, не перпендикулярна ли сила оси. Тогда момент ищется по формуле, например

Знак лучше выбирать, представив, куда движется винт под действием силы. Если винт движется по оси, то плюс, иначе – минус.
Для поиска плеча  пользуемся правилом трех направлений. должно быть перпендикулярно и F и х.
пользуемся правилом трех направлений. должно быть перпендикулярно и F и х.
Если сила направлена по отношению к оси произвольно, то следует разложить ее на составляющие вдоль осей. Для составляющих пользуемся вторым случаем.
Mx: 
My: 
Mz: 
 Рассмотрим второй пример.
Рассмотрим второй пример.
Однородная прямоугольная плита веса Q = 8кН , прикрепленная к стенке при помощи сферического шарнира А и цилиндрического шарнира В, удерживается в горизонтальном положении при помощи невесомого стержня, шарнирно закрепленного по концам. К плите приложена сила F=15 кН и пара сил с моментом M = 5 кНм . Определить опорные реакции и усилие в стержне.
Решение
Составим расчетную схему задачи, изобразив плиту под действием активной нагрузки и реакций связей (сила тяжести Q приложена в точке пересечения диагоналей плиты). Систему координат выберем таким образом, чтобы наибольшее число неизвестных реакций было параллельно координатным осям и пересекало их (это значительно упрощает уравнения равновесия). Для удобства решения задачи векторы F и M разложены на составляющие, параллельные координатным осям:
F1=F·cosα, F2=F·sinα M1=M·cosα, M2=M·sinα
где (см. рис.)

Таким образом получаем:
F1=15·0,6=9 кН, F2=15·0,8=12 кН M1=5·0,6=3 кНм, M2=5·0,8=4 кНм
Неизвестное усилие S, направленное вдоль стержня CD, также удобнее представить в виде двух составляющих: S1=S·cos30o=0,866·S, S3=S·sin30o=0,5·S (а).
 Расчетная схема
Расчетная схема
Составим уравнения равновесия
Решая систему уравнений (б) – (ж), подставив в нее предварительно выражения (а), получим:
Для самостоятельной подготовки к контрольной работе рекомендуется решить следующие задачи из задачника И.В. Мещерского «Сборник задач по теоретической механике» : 4.10;4.11;4.28;4.38;4.41;8.13;8.25;8.26;8.28;8.29.
В качестве «помощника» рекомендуем «решебник»
М.И. Бать, Г.И. Джанелидзе, А.С.Кельзон «Теоретическая механика в примерах и задачах» , том1.
Если в планах кафедр предусмотрена курсовая работа по статике, предлагаются задания по теме «равновесие системы тел».
Пример решения такого задания прилагается.
В предлагаемом примере необходимо определить четыре неизвестные реакции: три в заделке А и одна реакция в шарнире В. Но уравнений можно записать только три (см. 4). Наличие шарнира С позволяет решить эту задачу , если мы рассмотрим отдельно два тела, но при этом введем еще две реакции Хс и Yс.
Первоначально у нас было 4 неизвестных реакций и три уравнения, теперь мы имеем 6 неизвестных реакций , но, для каждого из тел теперь можем записать по три уравнения, то есть имеем 6 уравнений для 6 неизвестных реакций. Ниже записаны 6 уравнений статики, решение которых предлагается выполнить самостоятельно.
Полученные результаты, если нет ответов, необходимо проверить. Для этого предлагается сосчитать главный вектор активных сил (задаваемые силы) и главный вектор сил реакций, а также момент задаваемых сил и момент реакций относительно выбранного центра. Полученные значения должны отличаться только знаком ( с заданной точностью).
Расчётные задания для самостоятельной работы.
| F |
| P |
| C |
| A |
| d |
| q |
| a |
| b |
| M |
| b |
| a |
| B |
| 1.Найти опорные реакции в опорах A и B и реакции в шарнире C. |
| |||||||
| a (м) | b(м) | d(м) | α α | β | P (кн) | F (кн) | q (кн/м) | M (кн*м) |
| 2 | 3 | 4 | 0 | 0 | 10 | 6 | 2 | 3 |
| M |
| q |
| b |
| F |
| C |
| d/2 |
| a |
| B |
| P |
| A |
| b |
| d/2 |
| aff |
| 1.Найти опорные реакции в опорах A и B и реакции в шарнире C. |
| |||||||
| a (м) | b(м) | d(м) | α | β | P (кн) | F (кн) | q(кн/м) | M(кн*м) |
| 3 | 3 | 4 | 60 | 30 | 10 | 6 | 2 | 1 |
| a |
| d/2 |
| F |
| A |
| q |
| a |
| b |
| C |
| P |
| B |
| M |
| b |
| d/2 |
| 1.Найти опорные реакции в опорах A и B и реакции в шарнире C. |
| |||||||
| a (м) | b(м) | d(м) | α | β | P (кн) | F (кн) | q(кн/м) | M(кн*м) |
| 2 | 3 | 4 | 45 | 0 | 10 | 6 | 2 | 1 |
| F |
| M |
| d/2 |
| A |
| b |
| P |
| b |
| a |
| B |
| C |
| a |
| d/2 |
| 1.Найти опорные реакции в опорах A и B и реакции в шарнире C. |
| |||||||
| a (м) | b(м) | d(м) | α | β | P (кн) | F (кн) | q (кн/м) | M (кн*м) |
| 2 | 3 | 4 | 0 | 30 | 10 | 6 | 2 | 1 |
| P |
| F |
| A |
| C |
| B |
| a |
| b |
| d |
| D |
| aff |
| βff |
| q |
| M |
| 1.Найти опорные реакции в опорах A и B и реакции в D и C. |
| |||||||
| a (м) | b(м) | d(м) | α | β | P (кн) | F (кн) | q(кн/м) | M(кн*м) |
| 4 | 3 | 3 | 30 | 0 | 10 | 6 | 2 | 4 |
| A |
| F |
| a |
| B |
| a |
| P |
| q |
| d |
| b |
| d |
| M |
| b |
| C |
| α |
| 1.Найти реакции в опорах A, В и реакции в скользящей заделке C. |
| |||||||
| a (м) | b(м) | d(м) | α | β | P (кн) | F (кн) | q (кн/м) | M (кн*м) |
| 3 | 2 | 3 | 30 | -30 | 10 | 12 | 2 | 3 |
Лекция 4
Глава2
Последнее изменение этой страницы: 2019-06-09; Просмотров: 389; Нарушение авторского права страницы
 ≠0,
≠0,  ≠0, но при этом тело находится в равновесии. Но согласно 2-ой аксиоме статики (Свободное абсолютно твердое тело под действием двух сил будет находиться в равновесии только в том случае, когда эти силы равны, по величине и направлены вдоль одной и той же прямой в противоположные стороны), необходимо чтобы эти две силы
≠0, но при этом тело находится в равновесии. Но согласно 2-ой аксиоме статики (Свободное абсолютно твердое тело под действием двух сил будет находиться в равновесии только в том случае, когда эти силы равны, по величине и направлены вдоль одной и той же прямой в противоположные стороны), необходимо чтобы эти две силы  и
и  ( рис. 10) в сумме давали ноль. Отсюда сразу следует, что главный вектор сил равен нулю, и как следствие нулю должен быть равен и главный момент системы сил. Это необходимое условие равновесия, достаточность этого утверждения будет доказана позже. Итак, необходимым и достаточным условием равновесия тела или системы тел является равенство нулю главного вектора и главного момента системы сил (1).
( рис. 10) в сумме давали ноль. Отсюда сразу следует, что главный вектор сил равен нулю, и как следствие нулю должен быть равен и главный момент системы сил. Это необходимое условие равновесия, достаточность этого утверждения будет доказана позже. Итак, необходимым и достаточным условием равновесия тела или системы тел является равенство нулю главного вектора и главного момента системы сил (1). 

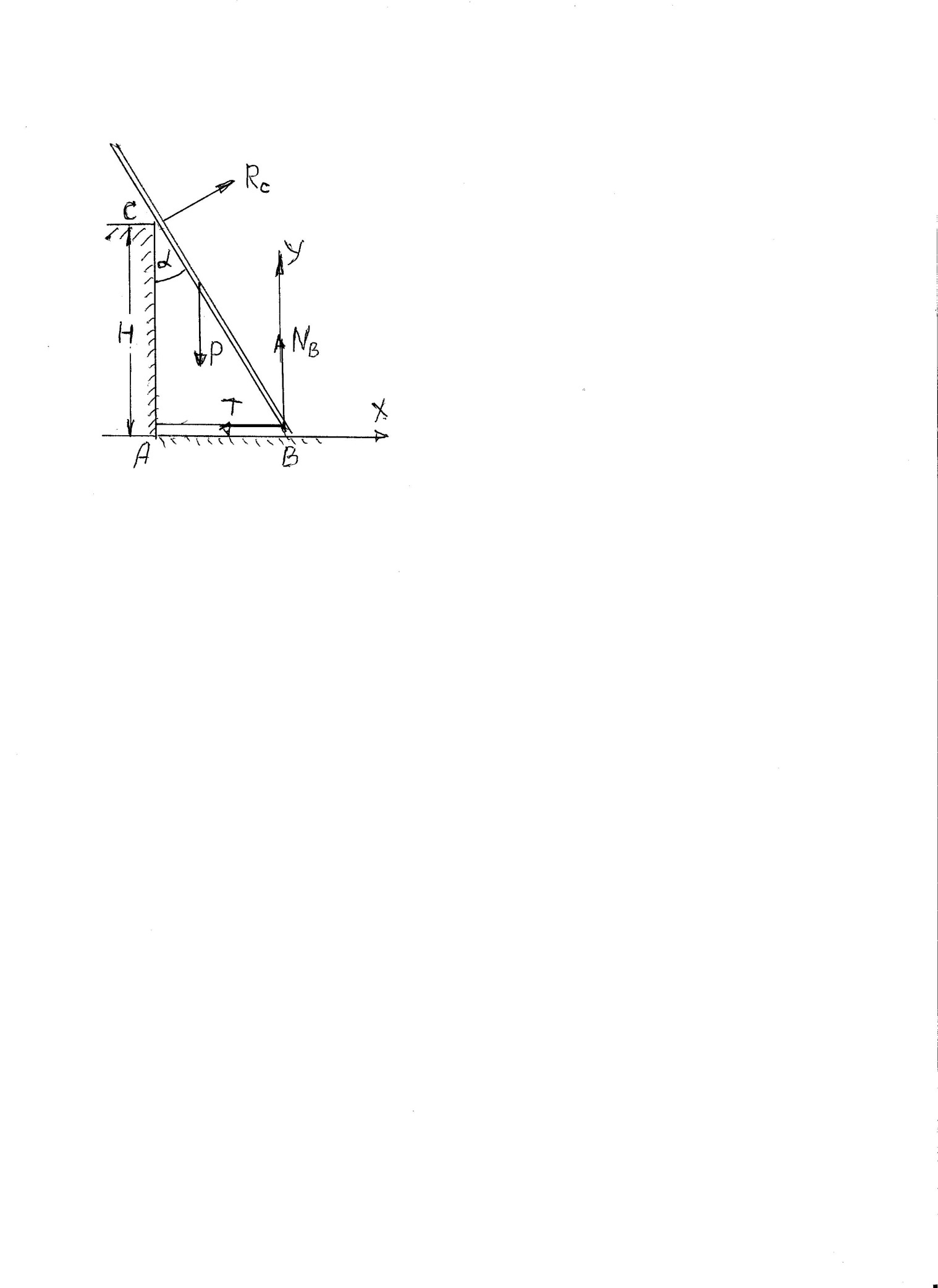 ЗАДАЧА 1.Однородная балка веса 600ни длины 4м опирается одним концом на гладкий пол, а промежуточной точкой С – на вертикальную стенку высотой 3м, образуя с вертикалью угол π/6. Балка удерживается в таком положении веревкой АВ, протянутой по полу. Пренебрегая трением, определить натяжение веревки Т, реакции вертикальной стенки Rс и пола Nв.
ЗАДАЧА 1.Однородная балка веса 600ни длины 4м опирается одним концом на гладкий пол, а промежуточной точкой С – на вертикальную стенку высотой 3м, образуя с вертикалью угол π/6. Балка удерживается в таком положении веревкой АВ, протянутой по полу. Пренебрегая трением, определить натяжение веревки Т, реакции вертикальной стенки Rс и пола Nв.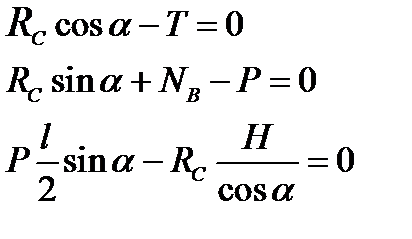
 =173.2н. Из первого получаем Т=150, и, наконец, Nв=513.4н.
=173.2н. Из первого получаем Т=150, и, наконец, Nв=513.4н.