|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ВОПРОС 10.Самолетные РЛС. Назначение, решаемые задачи. Режимы работы радиолокатора «Гроза»: «Земля», «Метео», «Контур». Роль РЛС в обеспечении безопасности полетов.
Назначение: обнаружение находящихся в передней полусфере ВС опасных для полета зон активной грозовой деятельности и мощной кучевой облачности с повышенной турбулентностью и определение их полярных координат (азимута и дальности); получение радиолокационной карты земной поверхности перед ВС для облегчения ориентации экипажа по характерным наземным ориентирам; обнаружение горных массивов и отдельных горных вершин и определение достаточного для безопасного полета превышения ВС над ними; измерение угла сноса ВС при полете над сушей. Указанная информация выдается экипажу ВС на визуальном индикаторе. В соответствии с тактическим назначением РЛС " Гроза" может эксплуатироваться в следующих режимах: " Земля", " Метео", " Контур", " Снос", " Коррекция". Режим работы " Земля": изображение местности на экране индикатора в режиме " Земля" получается в результате различных значений эффективной отражающей поверхности наземных объектов, что приводит к различию амплитуд отражённых сигналов, поступающих на вход приёмника РЛС. В свою очередь различие амплитуд сигналов вызывает различную яркость свечения отдельных элементов экрана, что позволяет судить о характере облучаемых объектов. Для получения изображения местности антенна РЛС в режиме " Земля" имеет веерный луч - широкий в вертикальной плоскости и узкий (4°, 2) в горизонтальной плоскости. При работе РЛС на развёртках " 30", " 50" и " 125" обзор земной поверхности осуществляется косекансной веерной диаграммой направленности. Для получения такой диаграммы в этом режиме используется антенный отражатель (рефлектор) двойной кривизны. При масштабе развёртки 250 км для обзора земной поверхности, в целях повышения дальностей наблюдения средних промышленных центров, используются поочерёдно два вида диаграмм направленности, переключаемых автоматически. При движении рефлектора вправо формируется узкая диаграмма направленности " карандашного" типа. За счёт большого послесвечения экрана индикатора радиолокационные изображения от узкого и веерного лучей воспринимаются оператором как единое целое. При работе на развёртке " 375" обзор поверхности осуществляется только узким лучом, который имеет в два раза больший коэффициент направленного действия. Получение с помощью одной антенной системы двух различных форм диаграммы направленности осуществляется следующим образом.Сдвоенный отражатель антенны состоит из симметричного параболического отражателя и отражателя специальной формы, выполненного в виде " козырька" в верхней части параболоида. Параболический отражатель при облучении его электромагнитной энергией формирует диаграмму направленности в виде узкого луча " карандашного" типа. Он изготовлен из полностью металлизированной стеклоткани. Профиль отражающей поверхности отражателя специальной формы рассчитан из условия получения в вертикальной плоскости косекансной диаграммы направленности. Этот отражатель представляет собой поверхность двойной кривизны, выполненной из металлизированной стеклоткани, металлизированные нити которой расположены строго горизонтально и имеют шаг 3 мм. Отражатель специальной формы размещается перед симметричным параболическим отражателем и закрывает только верхнюю его часть, образуя тем самим своеобразный " козырёк" антенного рефлектора. Формирование соответствующей диаграммы направленности осуществляется изменением плоскости поляризации излучаемых высокочастотных колебаний. При вертикальной поляризации облучающая электромагнитная энергия беспрепятственно проходит сквозь отражатель специальной формы с горизонтальным расположением металлизированных нитей и отражается от симметричного параболоида. При этом формируется диаграмма направленности в виде узкого луча. При изменении поляризации облучающих колебаний на горизонтальную происходит отражение от являющегося для данной поляризации непрозрачным отражателя специальной формы и формируется веерная диаграмма направленности косекансного типа. Для поворота плоскости поляризации излучаемых высокочастотных колебаний на 90°, необходимого для изменения формы диаграммы направленности с узкого луча на веерный, в РЛС " Гроза" применён ферритовый вращатель. Ферритовый стержень вращателя установлен на фторопластовой втулке внутри круглого волновода. Вдоль оси феррита действует постоянное магнитное поле, создаваемое электромагнитом, размещённым на волноводе. Угол поворота плоскости поляризации зависит от величины и направленности этого поля, которые устанавливаются с помощью реле изменения поляризации при смене режима работы станции. В режиме " Земля" (масштабы развертки " 30", " 50" и " 125" ) на катушку реле подаётся напряжение от бортсети +27В. В режиме " Земля" при масштабе развёртки " 375" катушка реле обесточена. При этом поляризация излучения - вертикальная и антенной формируется узкий луч. При развёртке " 250" и работе РЛС в режиие " Земля" питание на катушку реле подаётся не непрерывно, а через контакты кулачкового механизма выключателя. На экране выделяются три " тона": " черный" (отсутствие отражённого сигнала, что соответствует гладким водным поверхностям); " серый" (слабые сигналы, соответствующие отражению от земной поверхности); " белый" (сильные сигналы от интенсивно отражающих объектов). Режим работы " Метео": При работе РЛС в этом режиме обеспечивается получение на индикаторе в полярных координатах " азимут-дальность" радиолокационного изображения воздушной обстановки в пространстве, ограниченном азимутальными углами ±100° относительно строительной оси самолёта и углами места ± (1, 5 - 2°) относительно плоскости горизонта. Для того чтобы сектор обзора не изменял своего положения в пространстве при кренах и тангаже самолёта, что особенно важно при обходе грозовых зон, ось диаграммы направленности антенны гиростабилизирована. При необходимости обзора пространства под другими углами места диаграмма направленности антенны может быть наклонена вручную относительно плоскости горизонта на угол ±10°. В режиме работы " Метео" обзор пространства осуществляется РЛС с помощью симметричной узкой диаграммы направленности, получаемой в антенне при вертикальной поляризации излучаемых колебаний. Режим работы " Контур": В этом режиме радиолокатор позволяет выявить внутри отражений от грозовых областей и кучево-дождевых облачностей наиболее опасные для полёта зоны, состоящие из водных капель большого диаметра. За счёт специального построения схемы видеоусилителя указанные участки представляются на экране индикатора в виде затемнённых областей, расположенных внутри ярких отметок от обнаруженных грозовых зон. Затемнение областей, соответствующих участкам с высокой отражающей способностью, обеспечивается применением специальной характеристики, подавляющей все принимаемые сигналы, амплитуда которых превосходит определённый фиксированный уровень. Для предотвращения полного или частичного подавления сигналов от более слабых областей грозовой зоны, вызванного увеличением амплитуды отражённых сигналов при уменьшении дальности до них, в режиме " Контур" производится временнaя регулировка усиления приёмного устройства. Закон изменения усиления в зависимости от дальности выбран в РЛС таким, что обеспечивает практическое постоянство амплитуды принимаемых с одного и того же объекта сигналов при изменении дальности до него от 30-40 до нескольких километров. Безопасность полетов - комплексная характеристика воздушного транспорта и авиационных работ, определяющая способность выполнять полеты без угрозы для жизни и здоровья людей. Среди радиотехнических систем обеспечения безопасности полетов особое место занимают радиолокационные системы воздушных судов. МНРЛС «Гроза» обнаруживает опасные для полета зоны активной грозовой деятельности и мощные кучевые облачности с повышенной турбулентностью, также облегчает ориентацию экипажа по характерным наземным ориентирам, обнаружение горных массивов и отдельных горных вершин и определение достаточного для безопасного полета превышения ВС над ними. Лит-ра: лекции в электронном виде по радиолокации, часть 2, 4 лекция.
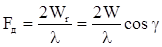
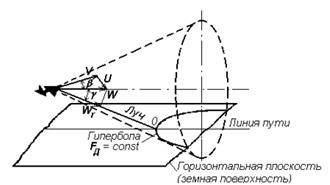
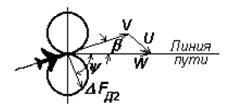
ВОПРОС 11. Самолетные РЛС. Назначение, решаемые задачи. Режимы работы радиолокатора " Гроза": " Готов", " Коррекция", " Снос". Роль РЛС в обеспечении безопасности полетов. Руководящей документацией ИКАО предписано, что все ВС, занимающиеся коммерческой деятельностью, должны быть оборудованы РЛ станцией в обязательном порядке. МНРЛС предназначена для решения ряда следующих задач: - обнаружение находящихся в передней полусфере ВС опасных для полета зон активной грозовой деятельности и мощной кучевой облачности с повышенной турбулентностью и определение их полярных координат (азимута и дальности); - получение радиолокационной карты земной поверхности перед ВС для облегчения ориентации экипажа по характерным наземным ориентирам; - обнаружение горных массивов и отдельных горных вершин и определение достаточного для безопасного полета превышения ВС над ними; - измерение угла сноса ВС при полете над сушей. В соответствии с тактическим назначением РЛС " Гроза" может эксплуатироваться в следующих режимах: " Земля", " Метео", " Контур", " Снос", " Коррекция". Режим работы " Готов" Когда переключатель режимов работы установлен в положение " Готов", излучения радиоволн не происходит, но радиолокатор находится в состоянии готовности к немедленной работе, если перед этим не менее чем 5 мин он был подключен к самолетной сети с помощью клавиши " РЛС". Режим работы " Коррекция" На ряде самолётов гражданской авиации, на которых установлены бортовые навигационные вычислители, с помощью РЛС " Гроза" может быть произведена коррекция счисленных вычислителями текущих координат места самолёта. Для этого используется какой-либо чётко наблюдаемый и легко опознаваемый объект с известными координатами и, по возможности, наименьших размеров. Его координаты вводятся в навигационный вычислитель, который при работе в специальном режиме определяет ожидаемые наклонную дальность и курсовой угол этого объекта в данный момент времени. Полученная информация передаётся вычислителем в РЛС, где она наносится на экран индикатора в виде светящегося кольца ожидаемой дальности и радиальной линии ожидаемого курсового угла (электронное перекрестие). На пересечении этих линий и должно по расчетам вычислителя находиться радиолокационное изображение наземного объекта. Так как текущие координаты места самолёта определяются вычислителем с ошибкой, точного совпадения практически не происходит и, чтобы его осуществить, необходимо изменить (увеличить или уменьшить) определённые вычислителем значения координат. Значения текущих координат места самолёта, при установке которых достигнуто совпадение, можно считать истинными и использовать в вычислителе, взамен ранее счисленных, для всех последующих расчётов до следующей очередной коррекции. Таков принцип выполнения радиолокационной коррекции. Радиолокатор при коррекции навигационного вычислителя является только индикатором совмещения, служащим для определения момента наложения перекрестия на изображение объекта. Все управление перекрестием и установка необходимых режимов работы различной аппаратуры борта осуществляется при этом с пульта вычислителя, а каких либо операций с помощью имеющихся в РЛС " Гроза" органов управления не производится. Формирование электронного перекрестия осуществляется в радиолокаторах " Гроза" в специальном блоке коррекции. Режим работы " Снос" Для определения угла сноса используется метод «остановленной антенны», основанный на том, что при совпадении ДН с направлением фактического пути самолета, т.е. с направлением вектора путевой скорости, вторичные доплеровские частоты оказываются минимальными. На рис.1 показан навигационный треугольник скоростей с учётом только горизонтальных составляющих воздушной скорости V, совпадающей по направлению с осью самолёта, скорости ветра U и результирующего вектора, совпадающего с линией пути - путевой скорости W. Угол сноса β между векторами V и W определяется в режиме работы " Снос". Измерение угла сноса самолёта основано на фиксации минимальной частоты биений вторичного эффекта Допплера, которые возникают при отражении сигнала от земной поверхности или иных протяжённых объектов. Для пояснения этого эффекта целесообразно воспользоваться понятием линий равных доплеровских частот на земной поверхности. Принцип их получения при горизонтальном полёте представлен на рис. 1. Значение частоты Допплера при отражении сигнала от точки земной поверхности О, лежащей на линии пути при бесконечно узкой диаграмме направленности РЛС, определяется
где λ - длина волны передатчика. Из выражения следует, что FД=const при γ =const. Полагая γ =const, будем мысленно вращать луч вокруг вектора W, образуя лучом поверхность конуса с осью, совпадающей с W. На земной поверхности луч прочертит кривую равных допплеровоких частот, которая является гиперболой, так как образуется как линия пересечения конуса и горизонтальной поверхности, параллельной оси конуса. Полученную гиперболу называют изодопплеровской, потому что она проходит через точки земной поверхности, которым соответствует постоянная частота Допплера. Меняя значение γ, можно получить семейство изодопплеровских гипербол, каждой из которых будет соответствовать своё новое значение FД (рис. 2). Используя это семейство, можно определить FД при получении отражённых сигналов от любой точки земной поверхности,
Рис. 1. Навигационный треугольник скоростей и линия равных допплеровских частот – изодопплеровская линия.
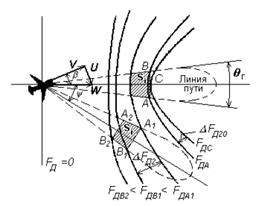
Рис. 2. Семейство изодопплеровских гипербол. В реальной РЛС луч антенны имеет конечную ширину в горизонтальной θ r и вертикальной θ в плоскостях, а зондирующий сигнал - импульс с длительностью τ и. Поэтому в каждый момент времени на вход приёмника РЛС одновременно будут поступать сигналы, отражённые от совокупности отражателей, лежащих в пределах участка местности Si (рис. 2-3). Протяжённость участка Si в направлении от самолёта определяется разрешающей способностью РЛС по дальности и углом наклона γ i, а в поперечном направлении - шириной диаграммы θ r и произвольно выбранным расстоянием Ri. Площадь участка Si будет приближённо равна
Участок Si для двух положений диаграммы направленности антенны РЛС по азимуту, спроектированный на сетку изодопплеровских частот, показан на рис. 2 и на рис. 3 в трёхмерной системе координат. Как следует из рис. 2, если ось луча смещена относительно линии пути на угол ψ, то частоты колебаний, отражённых от всех точек площадки Si, различны.
Рис. 3. Участки местности Si, сигналы от которых принимаются РЛС в течение длительности импульса ti.
Рис. 4. Полярная диаграмма ширины спектра вторичных доплеровских частот в горизонтальной плоскости. Наибольшее различие соответствует точкам А1 и В2. Максимальная допплеровская частота в пределах участка Si будет получена от точечного отражателя в точке А1, а минимальная - от отражателя в точке В2 (рис. 2-3). Для равноудаленных от РЛС точек в пределах участка Si наибольшее отличие в радиальных скоростях и, следовательно, в допплеровских частотах FД соответствует точкам А1 и В1
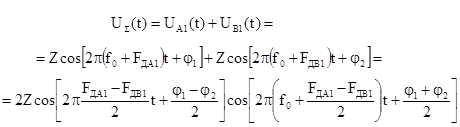
где θ г - ширина диаграммы направленности в горизонтальной плоскости. Сигналы, отражённые от разных точек Si, суммируются на входе приёмника и на выходе амплитудного детектора образуют разностные частоты, которые называются вторичными допплеровскими частотами (биениями). Для пояснения возникновения вторичных допплеровоких частот рассмотрим суммарный сигнал UΣ (t), образованный сигналами UА1(t) и UВ1(t), отражёнными только от точек А1 и В1 площадки Si. При этом будем считать, что РЛС работает в непрерывном режиме, излучая немодулированное синусоидальное колебание частоты f0, а отражённые сигналы от точек А1 и В1 имеют одинаковые амплитуды ZА1=ZВ1=Z
где j1 и j2 – набег фазы, возникающий при отражении зондирующего сигнала от точек А1 и В1. Как следует из выражения суммарный сигнал UΣ (t) является амплитудно-модулированным. Функция
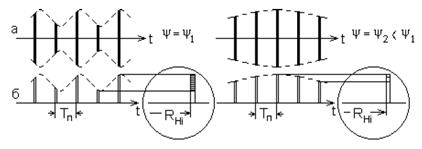
определяет закон амплитудной модуляции, а FДА1 и FДВ1 – частоту амплитудной модуляции. Таким образом, на выходе амплитудного детектора приёмника РЛС будет иметь место амплитудно-модулированное колебание. Огибающая амплитудно-модулированного суммарного сигнала UΣ (t) на выходе УПЧ и соответствующее этому сигналу напряжение на выходе амплитудного детектора представлены пунктиром на рис. 5 для двух значений отклонения диаграммы направленности антенны от линии пути ψ =ψ 1 и ψ =ψ 2< ψ 1.
Рис. 5. Биения амплитуды сигнала, принимаемого от участка Si, на выходе УПЧ (а) и амплитудного детектора (б) при непрерывном (обозначено пунктиром) и импульсном сигнале, вызванные вторичным эффектом Доплера. В реальных условиях на вход приёмника РЛС одновременно поступают сигналы, отражённые от множества точек участка Si. Допплеровские частоты этих сигналов различны и меняются, в зависимости от расположения отражающей точки площадки Si, в пределах от FДА1 FДВ2. Поэтому, в результате сложения принимаемых сигналов в приёмном тракте РЛС амплитуда результирующего колебания меняется не по косинусоиде, как в рассмотренном выше примере и показано на рис. 5, а более сложным образом. Спектр изменения амплитуды результирующего сигнала называется спектром вторичных допплеровских частот. Для равноудалённых от РЛС точек площадки Si ширина спектра допплеровских частот будет
где Wr=Wcosγ i – радиальная скорость движения самолёта относительно точки земной поверхности, находящейся на линии пути под углом γ i (рис. 3). Зависимость ширины спектра вторичных допплеровских частот от направления луча диаграммы направленности ψ для равноудалённых от РЛС точек характеризуется полярной диаграммой, показанной на рис. 4. В ней направление радиуса вектора соответствует углу поворота диаграммы направленности в горизонтальной плоскости ψ, а длина (в пределах сплошных касающихся окружностей) – ширина спектра вторичных допплеровских частот. Значение ширины спектра Δ FД2 достигает минимума при установке антенны в положение, при котором проекция направления максимума диаграммы направленности на земную поверхность совпадает с направлением линии пути самолёта. При этом частоты колебаний, отражённых от точек А и В, равны между собой и наибольшая частота биений образуется при отражении от точек С и В (или А) (рис. 2).
Эта величина достаточно мала (например, при W=720 км/ч, γ =78°, λ =5 см, θ r=5° получим FД2О≈ 4 Гц, т.е. практически нулевые биения. Для зондирующего сигнала в виде некогерентных импульсов следует иметь в виду, что отражённые импульсы от равноудалённых целей имеют одинаковую (хотя и случайную) начальную фазу. Поэтому; при достаточно высокой частоте повторения изменение амплитуды импульсов на входе приёмника за счёт биений будет происходить также, как для амплитуды непрерывных колебаний. Для выделения вторичных допплеровских биений в некогерентных РЛС достаточно воспользоваться обычным амплитудным детектором, в то время как в когерентных РЛС для определения требуется специальное опорное (когерентное) напряжение и фазовый детектор. За счёт вторичного эффекта Допплера амплитуда результирующего сигнала от площадки Si изменяется от одного периода повторения импульсов к другому с частотой FД2. На рис. 5 показаны изменения амплитуды некогерентных импульсов на входе приёмника (а) и на выходе амплитудного детектора (б) за счёт вторичных допплеровских биений, принимаемых только от участка Si. При развороте антенны на угол относительно линии пути частота биений будет достаточно высока, что приводит к быстрому ”мерцанию” яркости (амплитуды) отметки цели (рис. 5, а). При ψ =0 частота биений минимальна (рис. 4). Минимальную частоту биений можно зафиксировать на индикаторе кругового обзора, если выключена азимутальная развёртка, а угловое положение линии развёртки дальности с яркостной модуляцией отметок целей медленно изменяется лётчиком за счёт ручной регулировки азимутального положения антенны. При совпадении проекции оси косекансной диаграммы направленности с линией пути самолёта частота " мерцания" яркостных отметок всех целей на развёртке дальности будет минимальной и близкой к нулю. Угол смещения развёртки дальности относительно нуля азимутальной шкалы индикатора будет соответствовать углу сноса β самолёта (рис. 4). При измерении угла сноса самолёта управление движением антенны по азимуту производится вручную путём периодического подключения обмотки управления азимутального электродвигателя к пониженному переменному напряжению той или иной фазы, определяющей направление движения. Это выполняется с помощью клавиш, размещённых на лицевой панели основного индикатора слева от экрана. Так как питание двигателя осуществляется при этом пониженным напряжением, то скорость азимутального движения рефлектора при измерении угла сноса меньше, чем при других режимах. Для удобства управления антенной и получения требуемой точности её установки в РЛС предусмотрена возможность плавного изменения скорости с помощью специального регулятора, совмещённого с регулятором " Контраст". Момент совпадения оси диаграммы с линией пути определяется по уменьшению до минимума частоты " мерцания" яркостной модуляции линии развёртки, а отсчёт угла сноса производится по азимутальной шкале индикатора, имеющей градуировку через два градуса. Управление РЛС в режиме " Снос" осуществляется органами управления, расположенными на основном индикаторе. К ним относятся: переключатель длительностей развёртки; регулятор наклона антенны " Наклон"; регулятор " Контраст"; клавиши "
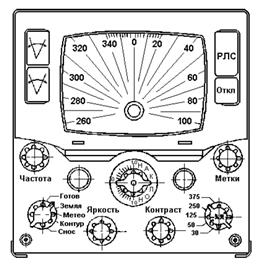
Рис. 6. Передняя панель индикаторного блока. Для работы в режиме СНОС: РЛС в режиме «Снос» обеспечивает измерение угла сноса самолета методом «остановленной антенны», не требуя для этого наличия каких-либо наземных РЛ ориентиров. Перевод радиолокатора в указанный режим должен производиться обязательно из режима «Земля» после получения в нем РЛ изображения земной поверхности на экране. Безопасность полетов - комплексная характеристика воздушного транспорта и авиационных работ, определяющая способность выполнять полеты без угрозы для жизни и здоровья людей. Среди радиотехнических систем обеспечения безопасности полетов особое место занимают радиолокационные системы воздушных судов. МНРЛС «Гроза» обнаруживает опасные для полета зоны активной грозовой деятельности и мощные кучевые облачности с повышенной турбулентностью, также облегчает ориентацию экипажа по характерным наземным ориентирам, обнаружение горных массивов и отдельных горных вершин и определение достаточного для безопасного полета превышения ВС над ними.
ВОПРОС 12.Самолетные РЛС. Назначение, решаемые задачи. Требования, состав и назначение основных узлов передатчика. Роль РЛС в обеспечении безопасности полетов. Самолетные РЛС. Назначение, решаемые задачи. Требования, состав и назначение основных узлов приемника. Роль РЛС в обеспечении безопасности полетов. (Справочник Давыдов: стр.141; Радиолокационные системы ВС Давыдова стр.12, 38 и 90 – основное) Руководящими документами ИКАО предусмотрено обязательное наличие МНРЛС на борту всех воздушных судов выполняющих коммерческие рейсы. Назначение: 1) определение местоположения ВС в пространстве, 2) определение скорости ВС, 3) определение окружающей обстановки и характеристик земной (подстилающей) поверхности. Задачи: 19) получение информации о навигационных параметрах полета (высоте, путевой скорости, угле сноса); 20) получение информации о наземной навигационной обстановке ( трасса, по которой летит ВС) 21) получение информации о метеообстановке вокруг ВС (грозы, облака, туманы); 22) получение информации об опасных объектах с точки зрения столкновения (др. ВС, горы, высотные постройки, птицы); 23) получение информации о характеристиках встречных или попутных ВС (наличие, габариты и ее навигационные параметры); 24) получение информации о характеристиках подстилающей поверхности. Передающий тракт любой РЛС состоит из передающего устройства фидерной системы и антенны. Радиопередающее устройство предназначено для формирования зондирующих сигналов путем преобразования энергии источников питания в энергию высокочастотных (ВЧ) колебаний и управления параметрами этих колебаний. Для этого в состав передающего устройства обычно включают источник питания, модулятор (управляющее устройство) и генератор. Источник питания обеспечивает подачу энергии в виде переменного или постоянного тока. Во втором случае источник питания выполняется в виде высоковольтного выпрямителя. Оба типа источников нашли применение в бортовых РЛС. Модулятор осуществляет управление параметрами огибающей ВЧ сигнала. Генератор вырабатывает мощный ВЧ сигнал, параметры которого определяются управляющими сигналами модулятора. По виду генераторного прибора в выходном каскаде передающие устройства подразделяются на ламповые, магнетронные, клистронные, амплитронные и т. п. В бортовых РЛС наибольшее применение нашли первых два вида.
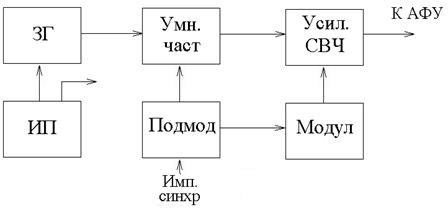
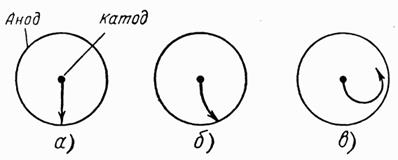
По диапазону генерируемых частот передатчики бортовых РЛС можно разделить на следующие группы: дециметрового (300...3000 МГц), сантиметрового (3000... 30000 МГц) и миллиметрового (30000…300000 МГц) диапазонов волн. В зависимости от целевого назначения построение генераторной части передающего устройства может быть одно-или многокаскадным. Однокаскадные генераторы работают в автоколебательном режиме. Энергия ВЧ колебаний передается непосредственно от мощного генератора в антенно-фидерную систему. Многокаскадные генераторы работают в режимах умножения частоты и усиления колебаний с внешним возбуждением (рис. 1). В качестве возбудителя используется сравнительно маломощный высокостабильный генератор, генерируемые колебания которого умножаются по частоте и усиливаются в последующих каскадах до требуемых значений. Многокаскадные генераторы более стабильны и могут развивать большую среднюю мощность. Однако мощные однокаскадные генераторы находят применение в случаях, когда определяющую роль играют малые габариты, а не стабильность частоты и мощность передающего устройства. К основным техническим данным радиопередающих устройств следует отнести: · импульсную мощность, под которой понимают мощность, передаваемую в нагрузку в течение длительности импульса, · среднюю мощность, вырабатываемую ВЧ генератором за период повторения импульсов (современное радиолокационное оборудование ВС имеет передающие устройства, генерирующие мощность от десятых долей ватта до сотен киловатт); · к. п. д. передающего устройства, определяемый в основном отношением отдаваемой мощности в АФС ко всей потребляемой (кпд передатчиков РЛС обычно составляет 0, 05...0, 25); · частоту или диапазон генерируемых частот, определяемый решаемыми задачами РЛС; · стабильность частоты генерируемых колебаний; · длительность и период повторения импульсов. Уход частоты генерируемых колебаний от номинального значения обусловлен воздействием дестабилизирующих факторов (нестабильность питающих напряжений, изменения степени согласования в тракте генератор — антенна, изменение давления, температуры, влажности и ряда других причин). Стабильность длительности и периода повторения импульсов определяется техническими и схемными решениями при проектировании передающего устройства (выбор типа модулятора, защита от помех и т. д.). Генерация импульсных сигналов СВЧ. В подавляющем большинстве бортовых метеонавигационных РЛС (МН РЛС) для генерации импульсных сигналов СВЧ используются однокаскадные передающие устройства с мощным автогенератором на базе многорезонаторного магнетрона. Магнетрон представляет собой электровакуумный прибор (цилиндрический диод), относящийся к группе устройств, работающих со скрещенными полями. Колебательная система выполнена в виде взаимосвязанных, объемных резонаторов, образующих анодный блок. Между анодом и катодом действуют два поля: электрическое поле и перпендикулярное ему магнитное поле наружного постоянного магнита. Под действием этих полей эмитируемые катодом электроны, попадая в пространство взаимодействия (кольцевое пространство между катодом и анодным блоком), совершают сложное эпициклоидальное движение (рис. 2).
Рис. 2. Траектории электронов в магнетроне. а — при отсутствии магнитного поля; б — при малом поле; в — при сильном поле. Конструирование магнетронов Основными конструктивными узлами современных магнетронов являются: · анодный блок (корпус) магнетрона, включающий резонаторную · система перестройки частоты; · вывод энергии; · катод с соответствующими выводами; · вакуумная оболочка и система охлаждения; · магнитная цепь. Основное назначение современных импульсных магнетронных генераторов — передатчики радиолокационных станций и других радиотехнических устройств, в том числе линий импульсной связи, радиоотелеметрических систем, маяков и т. п. Модуляторы передатчиков импульсных РЛС ВС. В импульсных РЛС модуляторы формируют короткие высоковольтные импульсы, управляющие работой магнетронного СВЧ генератора, а также вспомогательные старт-сигналы для запуска других узлов РЛС и сигналы бланкирования других бортовых радиотехнических устройств. Модулятор может состоять из подмодулятора и собственно модулятора. Первый формирует импульс по длительности и форме, второй по мощности. Работа любого модулятора в импульсной РЛС основана на принципе сравнительно продолжительного процесса накопления энергии накопителем и кратковременного ее использования в нагрузке. Обычно в качестве накопительных элементов используются конденсаторы или формирующие линии, поскольку они обеспечивают выработку управляющих импульсов, близких по форме к прямоугольным, что необходимо для стабильной работы магнетрона. К форме модулирующего импульса предъявляются следующие требования: · спад вершины импульса должен быть не более 0, 05 Umax за время его длительности; · длительность фронта tф, должна составлять не более 0, 1 его длительности tф< 0, 1 tи; · длительность среза tс не более (0, 2, ... 0, 25) tи; Длительность формируемых модулятором импульсов в бортовых РЛС в большинстве случаев составляет десятые доли или единицы микросекунд. Приемник. Супергетеродинные приемники обеспечивают наибольшие чувствительность и избирательность по сравнению с другими типами приемников: детекторными, прямого усиления и сверхрегенеративными. Поэтому почти все приемники РЛС строятся по супергетеродинной схеме. Современные радиолокационные приемники отличаются большим разнообразием схем и в ряде случаев большой сложностью, что обусловлено широким кругом задач, решаемых с помощью РЛС, и разновидностями их принципов построения. В супергетеродинном приемнике основное усиление принимаемого сигнала до необходимого уровня производится в УПЧ. Поэтому наиболее важная задача СВЧУ сводится, в сущности, к тому, чтобы преобразовать принятый СВЧ сигнал в сигнал промежуточной частоты. Однако поскольку СВЧУ является входным устройством приемника (первым каскадом), то его коэффициент шума почти полностью определяет общий коэффициент шума и тем самым чувствительность приемника. При этом предполагается, что полоса пропускания Dfпч выбрана на основе исходных данных и, следовательно, однозначно определена. Поэтому для достижения максимальной чувствительности указанный процесс преобразования частоты сигнала должен происходить с минимальным ухудшением отношения сигнал/шум на выходе преобразователя по сравнению с его величиной на входе приемника, т. е. схема СВЧУ должна обеспечивать минимальный коэффициент шума. Рассмотрим назначение отдельных элементов СВЧУ (рис. 1). В импульсных РЛС для излучения мощных импульсов передатчика и приема слабых отраженных от цели сигналов используется одна и та же антенна. Для осуществления такого режима работы используется антенный переключатель (АП) с устройством защиты приемника. На время излучения импульса передатчика АП подключает антенну к фидерному тракту передатчика и запирает вход приемника, при этом мощный СВЧ импульс поступает в антенну без значительного ослабления, а затухание между антенным трактом и входом приемника (в данном случае – вход малошумящего усилителя) становится очень большим. Тем не менее часть мощности передатчика просачивается из передающего тракта (тракта высокого уровня мощности) на вход приемника, а устройство защиты приемника ослабляет эту мощность до безопасного для приемника уровня. Такая защита особенно важна тогда, когда входным каскадом приемника является малошумящий усилитель (МШУ) или смеситель на полупроводниковых диодах, поскольку последние могут ухудшить свои параметры или даже полностью выгореть под воздействием импульсной мощности в несколько сот милливатт. В зависимости от выбранной схемы АП функции устройства защиты выполняются либо элементами самого АП, либо от него не зависящими специальными элементами. После окончания импульса передатчика АП автоматически и с минимальной задержкой (порядка единиц микросекунд) переключает антенну с передачи на прием, т. е. обеспечивает прохождение принятого антенной слабого сигнала без значительного ослабления на вход приемника и исключает потери мощности этого сигнала на ответвление в тракт передатчика. Поочередное подключение антенны к передающему и приемному трактам производится антенным переключателем синхронно с импульсной работой передатчика. |
Последнее изменение этой страницы: 2020-02-17; Просмотров: 386; Нарушение авторского права страницы
 ,
, 
 .
.


 " , расположенные слева от экрана индикатора.
" , расположенные слева от экрана индикатора.