|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ВОПРОС 15. Самолетные ответчики. Назначение, решаемые задачи. Типовая структурная схема, принцип действия. Тактико-технические характеристики. Роль СО в обеспечении безопасности полетов.
(смотреть учебник стр 184, 191, 204) 7.1. Классификация радиотехнических систем ближней навигации Системы ближней навигации (СБН) представляют собой региональные однопозиционные системы, предназначенные для определения азимута и дальности ЛА в пределах дальности прямой видимости. Для работы СБН выделены участки диапазона метровых и дециметровых волн. Основу СБН составляют сеть независимых наземных радиомаяков, по которым определяются навигационные параметры. Различают азимутальные (АРМ), дальномерные (ДРМ) и азимутально-дальномерные (АДРМ) радиомаяки. Которые устанавливают на аэродромах и в точках, соответствующих характерным участкам воздушных трасс. Навигационные параметры СБН - азимут и дальность определяются на ЛА относительно РНТ, где размещен РМ. При известной высоте полета этих данных достаточно для нахождения положения ЛА методом линий положения (см.п.1.7.3). В СБН выделяют каналы азимута и дальности, каждый из которых включает наземный (соответственно азимутальный и дальномерный) РМ и бортовую аппаратуру ЛА. Типы СБН различаются по виду информативного параметра сигнала, используемого для определения азимута, по формату сигнала, служащего для определения дальности, а также по структуре системы в целом и используемому диапазону радиоволн. Наибольшее распространения получили отечественная система ДМВ диапазона РСБН, а также стандартизованная ICAO зарубежная система МВ диапазона VOR/DME. Навигационная информация формируется с помощью наземных РМ, принцип работы которых зависит от канала СБН и типа РМ.
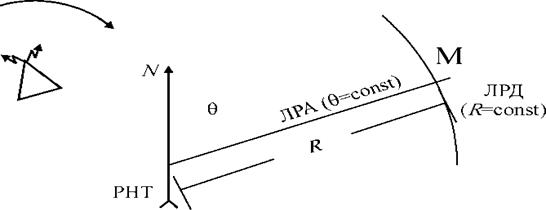
7.2. Канал азимута СБН строят на основе временного, либо фазового метода. АРМ формирует азимутальный сигнал, информативный параметр которого зависит от азимута точки приема. Момент начала отсчета азимута в бортовой аппаратуре определяется по опорному сигналу, который передается с РМ. Информация об азимуте заключена в сдвиге принятого сигнала относительно опорного по времени (временной метод) или по фазе (фазовый метод). Временной метод используется в отечественных СБН, фазовый - в зарубежных (VOR, TACAN). В системе VOR/DME в зависимости от структуры излучаемого АРМ сигнала различают стандартный VOR, доплеровский DVO Радиотехнические системы ближней навигации дециметрового диапазона 7.2.1. Назначение и обобщенная структурная схема РСБН Отечественная угломерно-дальномерная система ближней навигации и посадки (РСБН) ДМВ диапазона предназначена для измерения наклонной дальности и азимута ЛА относительно радиомаяка, а также отклонения от плоскостей посадочного курса и планирования и дальности до ВПП при посадке. К бортовой аппаратуре отечественных РСБН относятся: РСБН-ПКВ, РСБН-5С, РСБН-6С, РСБН-7С, А-312, А-317, А-321, А-323, А-324, А-331 (РСБН-85). На основе РСБН решаются следующие навигационные задачи: - определение местоположения ЛА; - межсамолетная навигация (некоторые типы бортовой аппаратуры); - управление воздушным движением (частично); - полет по запрограммированному маршруту; - вывод ЛА в заданную точку маршрута; - возврат на аэродром посадки и посадка; - коррекция счисленных автономными навигационными средствами координат. Определение местоположения ЛА осуществляется в полярной системе координат. Измеряемые навигационные параметры - азимут 0 и наклонная дальность R до ЛА. При этом местоположение ЛА определяется на борту как точка М пересечения двух линий Сложения, из которых одной является линия равных азимутов (ЛРА), а другой - линияравных дальностей (ЛРД) (рис.7.5).
Рис. 7.5. Определение местоположения ЛА в полярной системе координат.
Определение азимута осуществляется путем измерения временного ин-
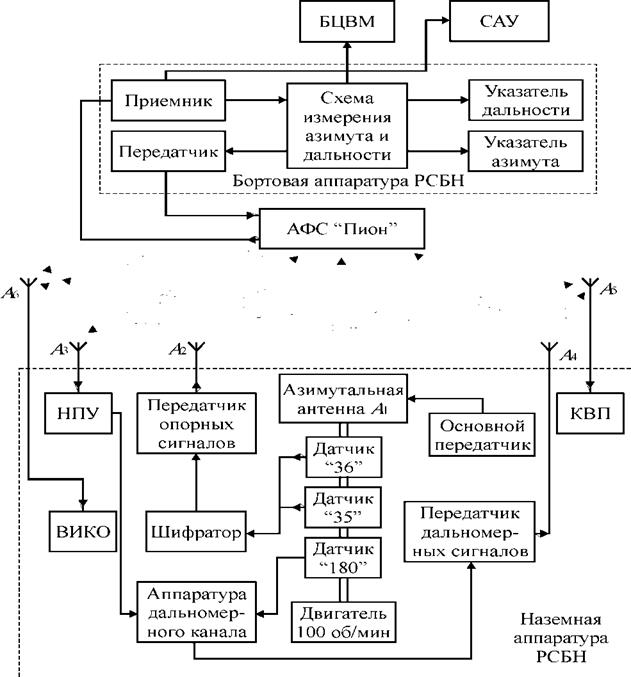
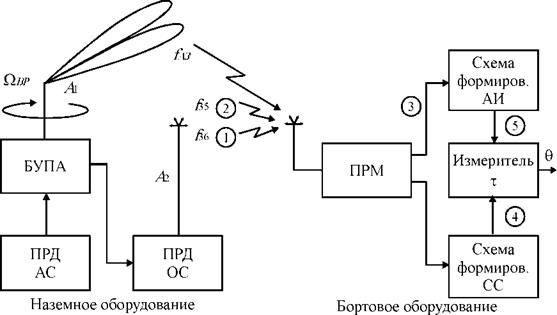
тервала между моментом выделения на ЛА сигнала «Север», соответствующего моменту совпадения оси диаграммы направленности (ДН) вращающейся антенны азимутального сигнала наземного РМ с направлением географического севера, и моментом обучения самолета сигналом этой же вращающейся антенны. Определение дальности осуществляется путем измерения временного интервала между моментом формирования запросного сигнала дальности на борту ЛА и моментом получения на ЛА ответного сигнала от наземного РМ. Взаимодействие наземного и бортового оборудования при определении навигационных параметров показано на рис.7.6. В соответствии с принципом работы бортовой аппаратуры обеспечивается одновременная передача следующих сигналов: В направлении САМОЛЕТ-ЗЕМЛЯ: - запросных сигналов дальности; - ответных сигналов наземной индикации (ОНИ); - сигналов навигационного опознавания ЛА. Все сигналы принимаются антенной А3 (рис.7.6) и поступают на наземное приемное устройство (НПУ) для дальнейшей обработки оборудованием радиомаяка. В направлении ЗЕМЛЯ-САМОЛЕТ: - азимутальных сигналов, облучающих ЛА с частотой 1, 66 Гц - излучаются через антенну А1; - опорных сигналов «35» и «36», имеющих соответственно частоты повторения 60 и 58, 3 Гц - излучаются через антенну А2; - ответных сигналов дальности - излучаются через антенну А4; - позывных сигналов опознавания радиомаяка - излучаются через антенну А4; - двухградусных сигналов с частотой 300 Гц при работе с ненаправленными радиомаяками и одноградусных сигналов с частотой 600 Г ц при взаимодействии с направленными радиомаяками (сигналов запроса наземной индикации - «ЗНИ») - излучаются через антенну А4; - сигналов курсового и глиссадного радиомаяков; - ответных сигналов посадочного ретранслятора дальномера. Передающее оборудование и антенные системы посадочных радиомаяков на рисунке не показаны. Антенна А5 предназначена для приема сигналов наземного радиомаяка с целью оценки работоспособности при помощи контрольновыносного пункта (КВП). Антенна А6 принимает сигналы, необходимые для индикации местоположения ЛА на выносном индикаторе кругового обзора (ВИКО), расположенном на командно-диспечерском пункте. Для обеспечения взаимодействия наземного и бортового оборудования приёмопередающая аппаратура обоих частей системы должна быть настроена на один частотно-кодовый канал (ЧКК). ЧКК различаются частотой несущего сигнала и кодовой расстановкой импульсов в сигнале. Кодирование сигнала запроса дальности, сигнала ответа наземной индикации, сигнала опознавания, сигнала запроса дальности в режиме «Посадка» применено для увеличения числа каналов связи. Коды каналов связи САМОЛЕТ-ЗЕМЛЯ и ЗЕМЛЯ-САМОЛЕТ приведены в табл.7.1. В таблице показаны коды сигналов при работе с различными типами наземных радиомаяков (всенаправленными и направленными). Параметры сигналов указаны в микросекундах.
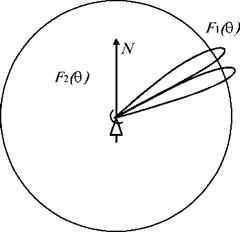
Рис.7.6. Взаимодействие наземного и бортового оборудования РСБН Также особенностью работы системы ближней навигации является то, что диапазон частот бортового передатчика расположен ниже частотного диа- пазона наземных передатчиков. Это обеспечивает частотное разделение каналов запроса и ответа и исключение взаимных помех. 7.2.2. Наземные средства обеспечения работы системы ближней навигации В отечественных РСБН азимутальный радиомаяк и ответчик дальномера конструктивно объединены и представляют собой единый комплекс наземного оборудования. Кроме того, в состав РСБН входят курсовой и глиссадный радиомаяки (КРМ, ГРМ), а также ретранслятор посадочного дальномера (РД), образующие посадочную радиомаячную группу. Азимутально-дал ьномерн ый радиомаяк В состав оборудования радиомаяка РСБН входят: антенно-фидерная система (АФС); аппаратная, смонтированная в кузове двухосного прицепа (РСБН-4Н); контрольно-выносной пункт (КВП), установленный на некотором удалении от аппаратной; источники электропитания; выносной индикатор кругового обзора (ВИКО) и пульт дистанционного управления, установленные на расстоянии до 30 км на командно-диспетчерском пункте. В аппаратной установлены радиопередающие и радиоприемные устройства, импульсно-навигационная и контрольно-юстировочная аппаратура (ИНА и КЮА), ИКО, аппаратура автоматической стабилизации частоты вращения азимутальной антенны, контрольно-измерительная аппаратура исполнительного пункта дистанционного управления, щит питания и вентиляции. Азимутальная антенна радиомаяка формирует в горизонтальной плоскости два узких лепестка с чётким нулём между ними Fj (0) (рис.7.7). Антенна вращается с постоянной скоростью вращения, равной 100 об/мин или 1, 66 об/с.
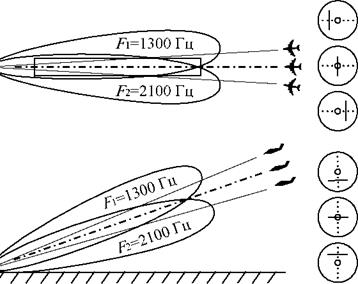
Рис. 7.7. Диаграммы направленности азимутальной F1(0) и ненаправленной F2(0) антенн в горизонтальной плоскости. R и прецизионный доплеровский РDVOR режимы работы. Питается азимутальная антенна от основного передатчика в режиме генерирования непрерывных колебаний. Передатчик опорных сигналов работает в импульсном режиме и имеет ненаправленную в азимутальной плоскости антенну с диаграммой направленности F 2 (0)=1 (рис.7.7). Через ненаправленную антенну излучаются две серии опорных кодированных радиоимпульсов (серии «35» и «36»), отличающиеся друг от друга на одну кодовую посылку за один оборот азимутальной антенны (структура сигналов рассмотрена в табл.7.1). Серия «35» содержит 35 кодовых посылок, излучаемых за один оборот азимутальной антенны, серия «36» - 36 кодовых посылок. Устройства формирования опорных импульсов жестко связаны с приводом азимутальной антенны РМ. В момент t0 прохождения равносигнального направления (РСН) ДН азимутальной антенны северного направления географического меридиана точки расположения РМ кодовые посылки серий «35» и «36» совпадают во времени. Через ненаправленную антенну передатчика дальномерных сигналов излучается двухимпульсная посылка сигнала «Ответ Д». Кроме того, по этому каналу происходит излучение запросных сигналов наземной индикации (ЗНИ), предназначенных для формирования отметки на индикаторе ВИКО. Сигналы ЗНИ излучаются через 2° вращения азимутальной антенны. Устройство форм и- рования двухградусных сигналов, как и устройства формирования опорных импульсов, жестко связаны с приводом азимутальной антенны. За один оборот азимутальной антенны излучается 180 сигналов ЗНИ, поэтому они также носят название опорных «180». Радиомаяк РСБН может устанавливаться как в районе аэродрома (на удалении от центра ВПП до 1000 м), так и на трассах полетов. В последнем случае радиомаяк должен устанавливаться с учетом нерабочей зоны над ним (±45°) и высоты полета. Для этого рекомендуется смещать радиомаяк от линии пути самолета на величину двух нерабочих зон для конкретной высоты полета. Опознавание самолетов, работающих с наземным радиомаяком, производится только по запросу с земли с помощью связной радиостанции, не входящей в состав радиомаяка. Для ответа на запрос летчик должен нажать кнопку ОПОЗНАВАНИЕ, расположенную на приборной доске, в результате чего самолетный запросчик дальности (СЗД) создает повторную посылку сигнала ОНИ и на индикаторах ИКО и ВИКО раздваивается видеоотметка этого самолета. Посадочная радиомаячная группа Посадочная радиомаячная группа ПРМГ предназначена для вывода самолетов, оборудованных бортовой аппаратурой систем РСБН, на ВПП аэродрома днем и ночью при минимумах погоды 1 и 2 категорий при ручном, ди- ректорном и автоматическом управлении ЛА. В состав подвижной радиомаяч- ной группы ПРМГ -5 входят дальномерно-курсовой радиомаяк (ДКРМ) и глис- садный радиомаяк (ГРМ). Дальномерно-курсовой радиомаяк состоит из курсового радиомаяка (КРМ) и ретранслятора-дальномера (РД). Радиомаяки КРМ и ГРМ по своему принципу действия одинаковы. Они создают в пространстве равносигнальные зоны приема двух сигналов с частотами модуляции 1300 и 2100 Гц. Зона курса создается КРМ в горизонтальной плоскости в направлении оси ВПП, зона глиссады создается ГРМ в вертикальной плоскости под углом планирования самолета. С помощью специальной антенной системы курсовой радиомаяк создает в горизонтальной плоскости два пересекающихся лепестка ДН. В левом лепестке по курсу посадки высокочастотные колебания маяка промодулированы частотой 2100 Гц, в правом - частотой 1300 Гц. Рабочие частоты КРМ полностью идентичны частотам азимутальных радиомаяков. Пересекающиеся ДН создают в горизонтальной плоскости равносигнальную зону. При отклонении самолета от оси равносигнальной зоны вправо на выходе бортового приемного устройства будет преобладать сигнал с частотой модуляции 1300 Гц, влево - с частотой модуляции 2100 Гц. При входе самолета в зону действия КРМ сигналы радиомаяка принимаются бортовым приемником РСБН и с помощью двух фильтров разделяются на два канала: канал 1300 Гц и канал 2100 Гц. Оба канала идентичны и имеют в своем составе выпрямители, подключенные встречно к общей нагрузке - командно-пилотажному (КПП) или навигационно-пилотажному (НПП) прибору. Если самолет находится на оси равносигнальной зоны, вертикальная стрелка прибора проходит через центр шкалы. Если же самолет отклоняется влево (вправо) от оси зоны, вертикальная стрелка КПП (НПП) уходит вправо (влево) от центра шкалы, показывая положение оси зоны (оси ВПП). Аналогично работает глиссадный радиомаяк, с той лишь разницей, что ГРМ с помощью своей антенной системы создает пересекающиеся лепестки в вертикальной плоскости. Причем в верхнем лепестке высокочастотные колебания промодулированы частотой 1300 Гц, в нижнем - частотой 2100 Гц. Напряжение с выхода канала глиссады отклоняет горизонтальную стрелку КПП (НПП). Если самолет находится на глиссаде планирования, горизонтальная стрелка КПП (НПП) проходит через центр шкалы. Если же самолет отклоняется вверх от глиссады, будет преобладать сигнал с модуляцией частотой 1300 Гц, а вниз - с модуляцией частотой 2100 Гц, и стрелка прибора уходит вниз (вверх) от центра шкалы, показывая положение глиссады относительно самолета. Вид диаграммы направленности КРМ в горизонтальной плоскости и ГРМ в вертикальной, а также отклонения стрелок КПП изображены на рис. 7.8. Для правильного выполнения посадки летчик должен удерживать самолет в таком положении, при котором вертикальная и горизонтальная стрелки пересекаются в центре шкалы КПП (НПП). Ретранслятор дальномера предназначен для ответа на запрос самолётного дальномерного устройства в режиме «Посадка». Измерение дальности происходит по принципу «запрос-ответ». Рабочие частоты ретранслятора посадочного дальномера полностью идентичны рабочим частотам дальномерного канала РСБН. £ I ' ГРМ Рис.7.8. Формирование равносигнальных зон курсовым и глиссадным радиомаяками. Схема измерения дальности, находящаяся на борту самолёта, запускает передатчик СЗД-ПМ, который излучает кодовую группу «Запрос». Запросные сигналы принимаются приёмником ретранслятора, декодируются, кодируются кодом ответа и подаются на запуск передатчика ретранслятора. Эти сигналы преобразуются в высокочастотные импульсные посылки, принимаются самолётным приёмником и с его выхода поступают на схему измерения дальности. Временной интервал между импульсами «Запрос» и «Ответ», принимаемыми самолётным приёмником, пропорционален дальности до наземного ретранслятора дальности. Дальномерно-курсовой радиомаяк устанавливается на продолжении оси ВПП на расстоянии 500-1200 м от ее конца. Допускается отклонение от оси ВПП не более ±1 м. Входящий в состав маяка контрольно-выносной пункт (КВП) располагается на продолжении оси ВПП на удалении 57 м от антенны радиомаяка в сторону ВПП. КВП служит для приема сигналов радиомаяка, необходимых для контроля его работы и выдачи сигнала «Авария». Антенная система глиссадного радиомаяка устанавливается в стороне от ВПП на удалении 200-450 м от начала полосы и 120-180 м от ее оси. Размещать радиомаяк можно с любой стороны от ВПП, но обычно принята левая сторона, если наблюдать со снижающегося самолета. На расстоянии 12, 6-48, 5 м от антенны маяка в направлении посадки устанавливается КВП. Участок местности для размещения радиомаяков ПРМГ выбирается на ровном открытом незаболоченном и незатопляемом месте. При этом должна существовать прямая видимость между центром передающей антенны КРМ и точкой, расположенной на высоте 5 м над противоположным торцом ВПП.
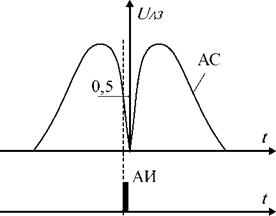
7.2.1. Принципы формирования и выделения навигационной и посадочной информации Формирование и выделение навигационной и посадочной информации осуществляется в функциональных каналах системы ближней навигации. К таким каналам относятся канал измерения азимута, канал измерения дальности, канал наземной индикации, канал посадочных сигналов. Принцип действия канала измерения азимута Навигационная информация в канале азимута формируется с помощью наземного азимутального радиомаяка. Канал азимута работает на основе временного метода. Азимутальный радиомаяк формирует и излучает опорные серии импульсов «35» и «36» и азимутальный сигнал. При совпадении моментов приема опорных сигналов в бортовой аппаратуре начинается отсчет временного интервала до момента приема азимутального импульса. Информация об азимуте ЛА относительно радиомаяка заключается в величине данного временного интервала. Упрощенная структурная схема азимутального канала и диаграммы, поясняющие принцип измерения азимута, изображены на рис.7.9. Передатчик опорных сигналов (ПРД ОС) серий «35» и «36» нагружен на ненаправленную в горизонтальной плоскости неподвижную антенну А2 с диаграммой направленности F 2 (0). Передатчик азимутального сигнала (ПРД АС) работает в режиме непрерывного излучения и нагружен на направленную антенну А1, имеющую в горизонтальной плоскости двухлепестковую диаграмму направленности F 1 (0) (см. рис.7.8). Направленная антенна А1, управляемая от блока управления положением антенны (БУПА), вращается в горизонтальной плоскости с постоянной угловой скоростью QBP, облучая поочередно ЛА, расположенные на различных азимутах в зоне действия системы. Огибающая принимаемого на борту ЛА азимутального сигнала, определяется формой ДН азимутальной антенны и имеет вид двойного колокола. По срезу первого импульса, на уровне 0, 5, в схеме формирования азимутального импульса формируется сигнал, носящий название азимутальный импульс (АИ). Принцип формирования азимутального импульса показан на рис.7.10. Частота следования принимаемых азимутальных импульсов определяется частотой вращения азимутальной антенны и составляет 1, 66 Гц. Начальный момент времени задается с помощью опорных сигналов серий «35» и «36», излучаемых передатчиком опорных сигналов через антенну А2.
N а) Опорные 36 © © © ©
б) Рис. 7.9. а) Структурная схема канала измерения азимута. б) Временные диаграммы канала измерения азимута.
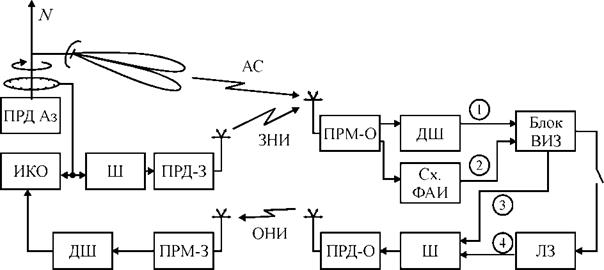
Рис.7.10. Формирование азимутального импульса в приемном устройстве. Устройства формирования опорных сигналов серий «35» и «36» связаны с приводом азимутальной антенны. В момент прохождения оси ее диаграммы направленности через северное направление географического меридиана формируются и излучаются в пространство точно совпадающие по времени пачки серий «35» и «36». В результате после приема бортовой аппаратурой опорных сигналов момент совпадения по времени пачек сигналов серий «35» и «36», фиксируемый схемой формирования северного сигнала (СС), задает начало отсчета времени t0, т.е. определяет северное направление. Момент t 0 совпадения принимаемых опорных сигналов серий «35» и «36» не зависит от азимута ЛА относительно радиомаяка, и будет одинаков для ЛА, находящихся на одном расстоянии от радиомаяка, но на различных азимутах. Частота вращения азимутальной антенны А1 постоянна и равна ОВР =100 об/мин. При известной и стабильной частоте вращения азимутальной антенны временной интервал между моментами приема совпавших по времени опорных и азимутального сигналов определяется выражением Тд= 0/ОВР. Отсюда азимут ЛА относительно радиомаяка 0= Qbp т (711) Таким образом, измерив временной интервал между моментами приема совпавших сигналов серий «35» и «36» и азимутального сигнала, можно определить азимут ЛА. Пропускная способность канала азимута не ограничена. На основании выражения (7.11) можно показать, что погрешность измерения азимута зависит от стабильности скорости вращения антенны и точности измерения временного интервала между моментами приема совпавших опорных и азимутального сигнала. Измерение временного интервала осуществляется цифровым методом. Цифровой метод измерения азимута основан на определении числа счетных импульсов за интервал времени между СС и АИ. При известном периоде следования счетных импульсов ТСИ их число N0 есть мера азимута 0 = £ 2ВР ТСИ N 0. Принцип действия канала измерения дальности В основу работы канала дальности положен принцип «запрос-ответ». При этом наклонная дальность до наземного радиомаяка определяется путем измерения временного интервала между моментом излучения бортовой аппаратурой запросного и моментом приема ответного сигналов. Упрощенная структурная схема канала дальности РСБН и временные диаграммы, поясняющие работу схемы, изображены на рис.7.11. Работа канала дальности состоит в следующем. Г енератор запросных импульсов (ГЗИ) формирует кодированные сигналы запроса дальности. Импульсы запроса дальности (ИЗД) поступают на шифратор (Ш), где из них формируются двухимпульсные пачки с заданным периодом следования импульсов в пачке (кодом). Эти импульсы модулируют передатчик запросчика (ПРД-З) и излучаются на несущей частоте f \. В приемнике ответчика (ПРМ-О) эти сигналы усиливаются, преобразуются по частоте, детектируются и подаются на дешифратор (ДШ). Дешифратор преобразует пачку из двух кодированных видеоимпульсов в одиночный импульс, передний фронт которого определяет момент приема запросного сигнала. Формирователь сигнала ответа (ФСО) предназначен для задержки принятого импульса запроса дальности на фиксированное время tA3. Далее сигнал снова кодируется в шифраторе ответчика для получения пачки из двух импульсов, которыми модулируется передатчик ответчика (ПРД-О). Импульсы ответа дальности (ИОД) излучаются ответчиком на частоте f для разделения каналов запроса и ответа. Приемник запросчика и его дешифратор выполняют те же функции, что и в ответчике. С выхода ГЗИ и дешифратора запросчика на входы измерителя временной задержки (ИВЗ) поступают импульсы, соответствующие началу и концу временного интервала ТR, пропорционального измеряемой дальности. Таким образом, уравнение, устанавливающее связь между измеряемым временным интервалом и дальностью, имеет вид R = c(Tr - 1А3 }. (7.12) 2 Код сигнала в совокупности со значением несущей частоты образуют частотно-кодовый канал РСБН. В зависимости от характеристик наземной аппаратуры РСБН число частотно-кодовых каналов дальности может составлять 88 или 176. Дополнительная задержка сигнала tA 3 в ФСО вводится для того, чтобы минимальная измеряемая дальность аппаратурой РСБН была равна нулю. Действительно, при использовании общей приемо-передающей антенны канал приема бланкируется на время, равное длительности излучаемого сигнала Т. СТ При этом минимальная измеряемая дальность составляет Rmin = —^. Тогда аппаратурная задержка сигнала в ФСО должна удовлетворять условию tA3 ^ ТС. Максимальная однозначно измеряемая дальность определяется периодом следования сигналов запроса дальности и удовлетворяет выражению Rmax < cTai. При Tсл = 0, 033 с получим Rmax < 500 км. 2 Анализ выражения (7.12) показывает, что точность измерения дальности в РСБН зависит от стабильности скорости распространения радиоволн, стабильности аппаратурной задержки сигнала в ФСО и погрешности измерения временного интервала схемами ИВЗ. Измерение временного интервала осуществляется измерителем дальности. Измеритель дальности основан на цифровом методе и определяет число счетных импульсов за интервал времени 4 между импульсом запроса дальности и импульсом ответа дальности. При известном периоде следования счетных импульсов ТСИ их количество NR является мерой дальности: R = 0, 5 cTC ^ NR. Принцип действия каналов индикации и опознавания Канал индикации служит для определения полярных координат ЛА и наземного контроля за воздушной обстановкой в зоне действия радиомаяка РСБН, т.е. для решения задач УВД. Упрощенная структурная схема канала индикации изображена на рис.7.12. Канал индикации работает следующим образом. На оси вращения азимутальной антенны установлен диск со 180 магнитными вставками, расположенными по окружности диска через 2°. При прохождении магнитной вставки над токосъемником вырабатывается электрический импульс, подаваемый на ИКО для формирования радиально-круговой развертки, синхронизированной с вращением азимутальной антенны. При определении дальности до ЛА на наземном оборудовании РСБН используется тот же принцип и тот же дальномерный канал, что и при определении дальности на борту ЛА. Сигнал запроса наземной индикации (ЗНИ) излучается наземным оборудованием, а сигнал ответа наземной индикации (ОНИ) - бортовой аппаратурой РСБН. Для разделения сигналов дальномерного канала и канала индикации во избежание взаимных помех применяются различные способы их кодирования. Так, если сигналы дальномерного канала представляют собой двухимпульсные посылки с частотой повторения 30 Гц, то сигналы канала индикации - трехим- пульсные посылки с частотой повторения 300 Гц. Для формирования сигналов ЗНИ импульсы с токосъемника поступают на шифратор ответчика, где преобразуются в трехимпульсный код и запускают ПРД-З, который излучает сигнал ЗНИ на частоте канала ответа дальности. Этот процесс повторяется через каждые 2° поворота азимутальной антенны. Сигнал ЗНИ принимается на борту ЛА приемником ПРМ-О, его обработка производится в дальномерном тракте, где сигнал усиливается, преобразуется по частоте, детектируется и затем декодируется в дешифраторе. В результате трехимпульсный сигнал ЗНИ на борту ЛА преобразуется в одиночные импульсы с частотой следования 300 Гц. Эти импульсы поступают на один из входов блока выделения импульса запроса (ВИЗ). Наряду с приемом сигналов ЗНИ на борту ЛА происходит прием азимутальных сигналов, излучаемых передатчиком азимутального сигнала (ПРД Аз.) через вращающуюся направленную антенну. Обработка этих сигналов выполняется в азимутальном тракте приемника ПРМ-О. После их усиления, преобразования по частоте, детектирования и декодирования сигнал поступает в схему формирования азимутального импульса (Сх. ФАИ) где формируется азиму- тальный импульс, который поступает на второй вход блока ВИЗ (формирование АИ показано на рис.7.10).
Наземное оборудование Бортовое оборудование а)
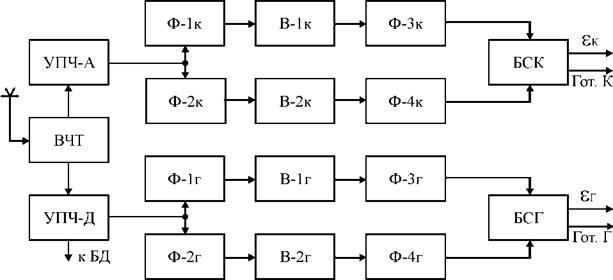
б) Рис.7.12. а) Структурная схема канала индикации. б) Временные диаграммы канала индикации В момент совпадения азимутального импульса и импульса ЗНИ на выходе блока ВИЗ формируется импульс ОНИ. Момент формирования импульса ОНИ соответствует моменту, когда азимутальная антенна радиомаяка направлена осью своей диаграммы направленности на ЛА (так как только в этот момент времени возможен прием на борту ЛА азимутального сигнала). С выхода блока ВИЗ импульс ОНИ поступает на шифратор канала дальности бортовой аппаратуры, где преобразуется в трехимпульсный код сигнала ОНИ и далее запускает ПРД-О, который излучает сигнал ОНИ на частоте канала запроса дальности. Одновременно с излучением сигнала ЗНИ запускается развертка на ИКО. Яркостная отметка на экране ИКО появляется только на той из 180 линий круговой развертки, которая соответствует азимуту ЛА, т.к. только в этом положении азимутальной антенны бортовая аппаратура излучает сигнал ОНИ. Расстояние от начала линии развертки до яркостной отметки пропорционально дальности до ЛА, которая в канале индикации измеряется временным методом по задержке между моментом излучения сигнала ЗНИ и приема сигнала ОНИ. В режиме навигационного опознавания импульс ОНИ дополнительно проходит ЛЗ, что приводит к появлению сдвоенной яркостной отметки на ИКО. Максимальная дальность, измеряемая в режиме индикации: c ' ТСЛ ЗНИ 3 •108 Rmax = = = 500 км max 2 2 • 300 Принцип действия канала посадки Канал посадки предназначен для определения угловых отклонений ЛА от линии курса (оси ВПП) в горизонтальной плоскости и от линии глиссады (номинальной траектории снижения) в вертикальной плоскости. Наземное оборудование канала посадки состоит из курсового (КРМ), глиссадного (ГРМ) радиомаяков и ретранслятора дальномера (РД). КРМ работает на частотах канала азимута РСБН, а ГРМ и РМ - на частотах канала дальности. Принцип действия бортовой аппаратуры канала посадки основан на сравнении принимаемых сигналов с различными частотами модуляции и определении коэффициента разнослышимости (КРС): КРСк КРСг = ( Ul К - U 2К ) (Ulр - U2г ) Г (Ulг + U2г ) где: U 1 и U2 - амплитуды сигналов с частотами модуляции 1300 и 2100 Гц, а индексы «К» и «Г» означают принадлежность к каналу курса или глиссады. Бортовая аппаратура канала посадки имеет общий высокочастотный тракт ВЧТ с каналами азимута и дальности основной аппаратуры РСБН и общий запросчик дальномера. Структурная схема канала посадки представлена на рис.7.13. Сигналы КРМ и ГРМ усиливаются соответственно в УПЧ-А и УПЧ-Д каналов азимута и дальности. Сигналы КРМ после детектирования в УПЧ-А разделяются фильтрами Ф-1к и Ф-2к по частотам модуляции, выпрямляются (В-1к и В-2к), фильтруются (Ф-1к и Ф-2к) и поступают на балансную схему сравнения БСК. Сигнал БСК бк, пропорциональный КРСК, подается на приборы, показывающие угловое отклонение ЛА от линии курса, и в САУ. Одновременно формируется сигнал исправности (готовности) канала курса «Гот.К». Аналогичную обработку проходят и сигналы ГРМ.
Рис.7.13. Структурная схема канала посадки.
ВОПРОС 16. Радиотехнические системы посадки. Назначение, классификация. Категории систем посадки. Размещение радиомаяков инструментальной системы посадки типа ILS на аэродроме. Структурная схема и принцип действия канала курса. Факторы, влияющие на точность канала курса и способы ее повышения. Роль радиотехнических систем посадки в обеспечении безопасности полетов.
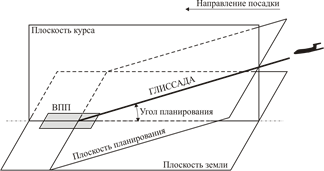
С помощью системы посадки ВС должно быть выведено с требуемой вероятностью в некоторую область пространства, положение и размеры которой зависят от посадочного метеоминимума. Эта область представляет собой пространство допустимых отклонений ВС от заданной посадочной траектории, попадание в которое гарантирует, при условии нахождения скорости в установленных пределах, выполнение необходимого корректирующего маневра и приземление в заданной точке ВПП. Для обеспечения посадки самолетов необходимо решать комплекс задач, основными из которых являются: - привод самолетов в район аэродрома посадки; - организация четкого управления движением самолетов в районе аэродрома; - обеспечение непосредственно самой посадки самолетов.
Система посадки задает в пространстве плоскость курса и плоскость планирования (снижения), пересечение которых определяет линию планирования самолета (глиссаду).
По способу задания линии планирования различают: инструментальные системы посадки - линия планирования задается с помощью наземных РМ, а информация поступает на приборы летчика; радиолокационные системы посадки - линия планирования задается летчику по командам с земли. ИКАО стандартизировала и классифицировала РСП по их эксплуатационным характеристикам. В основу этой классификации положена возможность обеспечения захода на посадку или посадки самолета при определенных метеорологических условиях. Различают системы посадки 1, 2 и 3 категорий. системы I категории обеспечивают управление самолетом при заходе на посадку до ВПР=60 м при визуальной видимости на ВПП не менее 800 м; системы II категории обеспечивают управление самолетом при заходе на посадку до ВПР=30 м при визуальной видимости на ВПП не менее 400 м; системы III категории предназначены для посадки с приземлением при значительном ограничении или отсутствии видимости земли: системы категории 3А – при дальности видимости вдоль ВПП 200м, категории 3В – при дальности видимости ВПП около 50 м, а системы категории 3С – при полном отсутствии видимости. Таким образом, РМС I, II и III категорий обеспечивают данные для управления самолетом от границ зоны действия до точки, расположенной на глиссаде на высоте соответственно 60, 30 и 0 м над горизонтальной плоскостью, включающей ВПП
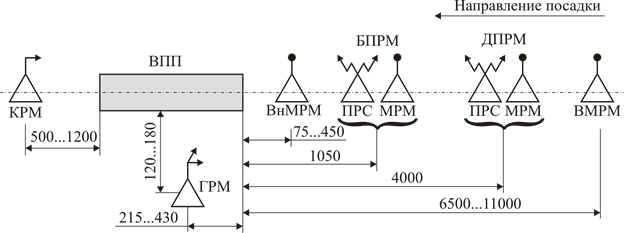
Схема размещения РМ инструментальной системы посадки по стандартам ИКАО. Внешний радиомаркерный пункт располагается на удалении 7200 м от порога ВПП, средний – на удалении 1050±150 м, а внутренний – на удалении 75...150 м. Средний радиомаркерный пункт предназначен для информирования экипажа о приближении к точке начала визуального наведения, внутренний радиомаяк – для обозначения момента пролета высоты принятия решения.
Канал курса — наземная и бортовая аппаратура, излучающая и принимающая сигналы, содержащие информацию для управления ЛА в горизонтальной плоскости при заходе на посадку. Курсовые радиомаячные системы 1 категории обеспечивают задание плоскости курса амплитудным равносигнальным методом.
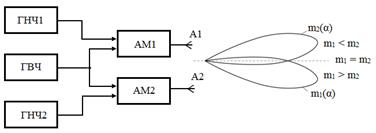
Структурная схема КРМ равносигнального типа. Колебания высокой частоты, формируемые ГВЧ, подвергаются амплитудной модуляции колебаниями низких частот 90 Гц (ГНЧ1) и 150 Гц (ГНЧ2) и подводятся к антеннам А1и А2, формирующим поле излучения, распределение энергии в которых отображается ДН F 1 ( α ) и F 2 ( α ). Линия пересечения ДН представляет собой равносигнальное направление, с помощью которого задается линия курса. |
|||||||||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2020-02-17; Просмотров: 280; Нарушение авторского права страницы