|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Недостатки, свойственные посадочным радиолокаторам⇐ ПредыдущаяСтр 14 из 14
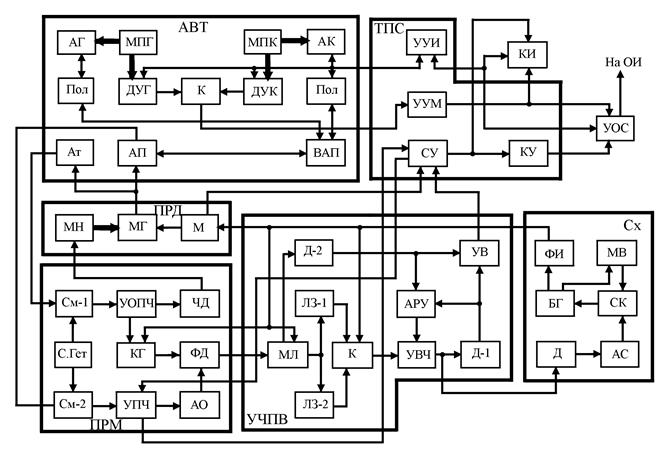
Существующие посадочные радиолокаторы в основном удовлетворяют требованиям ИКАО. В настоящее время они довольно эффективно используются как средство управления воздушным движением для контроля с земли за положением ВС относительно линий курса и глиссады при заходе на посадку, а также как резервное средство радиомаячной системы посадки. Применение посадочных радиолокаторов в комплексе со светотехническими и другими радиотехническими средствами способствует повышению уровня безопасности посадки, снижению посадочных минимумов, увеличению пропускной способности аэропортов. Вместе с тем посадочным радиолокаторам свойственны недостатки, снижающие эффективность их использования. Основной из них связан со значительными погрешностями определения координат ВС при визуальном съеме информации, субъективизмом в оценке воздушной обстановки, выработке команд диспетчером посадки и значительным временем, необходимым для принятия решения и передачи команд на борт ВС. Опыт эксплуатации показывает: поляризационная селекция, используемая в посадочном радиолокаторе как средство защиты от метеопомех, недостаточно эффективна в особенности при ливневых осадках. Принятая прямоугольная система координат и неравномерная развертка по дальности являются причиной того, что при линейном движении ВС в вертикальной и горизонтальной плоскостях при посадке отметка от него на экране индикатора перемещается по криволинейным траекториям (линиям курса и глиссады). Это обстоятельство создает неудобства для работы диспетчера при отождествлении радиолокационного изображения с реальной воздушной обстановкой и определении места ВС. Структурная схема ПРЛ Рис.1 Структурная схема ПРЛ (рис.1) состоит из следующих основных элементов: антенно-волноводного тракта АВТ; передатчика ПРД; приемника ПРМ; устройства черезпериодного вычитания сигналов УЧПВ, осуществляющего селекцию движущихся целей; синхронизатора Сх; тракта передачи сигналов ТПС; устройства обработки сигналов УОС, а также контрольного КИ и основного (ОИ) индикаторов. Антенно-волноводный тракт служит для излучения и приема электромагнитных колебаний в пределах заданного сектора пространства, изменяя поляризации этих колебаний для ослабления влияния на характеристики ПРВ мешающих отражений, а также для передачи высокочастотных сигналов к антенне или от нее. Кроме того, в АВТ формируются для индикаторов ПРВ угловые отметки обозначения определенных положений антенн и сигналы угловой информации. Основные элементы АВТ — антенна курса АК и антенна глиссады АГ создают узкие в одной и широкие в другой плоскости ДН, с помощью которых осуществляется обзор пространства. Ширина ДН антенны курса в горизонтальной плоскости - 0, 5°, а в вертикальной - несколько градусов. Характерной особенностью ПРЛ является поочередная работа антенн, что позволяет использовать для каналов курса и глиссады общий передающий и приемный тракты и облегчить раздельную индикацию положения ЛА относительно линий курса и глиссады. Антенны передают и принимают сигналы в течение интервалов работы, соответствующих движению антенн с постоянной угловой скоростью. К волноводному тракту антенны подключаются вращающимся антенным переключателем ВАП. Во время переключения антенны не излучают и не принимают энергию. В большинстве ПРЛ применяется механическое сканирование антенны. С механизмом привода МПК или МПГ соответствующей антенны (см. рис.1) связаны датчики угловой информации ДУК и ДУГ, вырабатывающие сигналы для формирования разверток индикаторов и угловых отметок определенных положений антенн. В некоторых зарубежных ПРЛ (например, AN/TPN-25) применяют антенны типа фазированных решеток, состоящих из нескольких сотен (до 800) излучающих элементов. В таких антеннах положением ДН в пространстве управляют электронным способом с помощью ЦВМ. При использовании электронного сканирования информация об угловом положении антенны выдается с ЦВМ, которая управляет положением ДН. Сигналы для развертки луча индикатора по азимуту (канал курса) или углу места (канал глиссады) формируются сельсинами-датчиками, роторы которых связаны с механизмом поворота соответствующей антенны. Формируются два вида сигналов: синусоидальное напряжение частотой 10 кГц, модулированное по амплитуде в соответствии с законом сканирования антенн (угловая информация), и напряжение гашения индикаторов в нерабочем секторе антенн, которое меняется в соответствии с углом наклона АК в вертикальной и АГ в горизонтальной плоскостях. Поэтому на экране индикатора высвечиваются только секторы, соответствующие данному углу установки антенн. Напряжение питания сельсинов подается с устройства обработки сигналов УОС. Промодулированные напряжения сельсинов-датчиков также поступают на усилитель угловой информации УУИ, а затем транслируются на КДП. Угловые метки вырабатывают фотоэлектронные датчики, связанные с механизмом поворота антенн. Основу каждого датчика составляет сегмент с тремя узкими прорезями, перемещаемый механизмом поворота антенны между источником света и фотодиодом. Сигналы датчиков после усилителя угловых меток УУМ по кабельной линии КЛ поступают на УОС, а затем на основные индикаторы ПРЛ. Кроме того, эти сигналы подаются на КИ. Коммутатор К, работающий синхронно с вращающимся антенным переключателем ВАП, служит для подключения сигналов угловой информации каналов курса и глиссады к общему тракту передачи сигналов. В состав АВТ входит также антенный переключатель АП, отключающий приемный тракт на время излучения зондирующего импульса, и аттенюатор Ат., через который часть мощности излучаемого сигнала ответвляется в приемное устройство, где используется для автоподстройки частоты магнетронного генератора передатчика и фазирования когерентного гетеродина устройства СДЦ. Конструктивно АК и АГ обычно представляют собой зеркальные антенны с отражателями специальной формы или в виде части параболоида вращения. Вблизи от облучателей антенн в волноводном тракте расположены поляризаторы Пол., позволяющие с помощью помещаемой внутрь волновода диэлектрической пластины изменять поляризацию излучаемых колебаний от линейной до круговой и подавлять отраженные от гидрометеоров сигналы. Передатчик содержит магнетронный генератор МГ, модулятор М и механизм настройки магнетрона МН. Магнетрон генерирует зондирующие импульсы длительностью порядка десятых долей микросекунды с мощностью 50 — 300 кВт. Особенностью передатчика, связанной с применением в ПРЛ устройства СДЦ, является работа с двумя частотами повторения импульсов. Для предупреждения ухода частоты генерируемых магнетроном колебаний из-за изменения режима магнетрона применяются специальные меры, например изменение выходного напряжения модулятора в такт со сменой частоты повторения импульсов. Для обеспечения постоянства частоты зондирующих колебаний при температурных изменениях параметров магнетрона частота последнего подстраивается по местному стабильному гетеродину СГет. с помощью устройства АПЧ, входящего в состав приемного тракта. Исполнительным устройством АПЧ служит механизм настройки магнетрона. Этим механизмом можно управлять и вручную. Модулятор передатчика выполнен по схеме с накопителем энергии и импульсным тиратроном в качестве разрядного элемента. Запускающие импульсы подаются на тиратрон от синхронизатора (при работе с СДЦ) или от входящего в состав модулятора генератора импульсов. Как правило, ПРЛ работают на одной фиксированной частоте. Однако, иногда для борьбы со слепыми скоростями, свойственными устройствам СДЦ, применяют поочередное излучение на двух несущих частотах. Приемное устройство содержит три функциональные цепи: устройство АПЧ магнетрона; канал основного усиления принимаемого сигнала и входные цепи устройства СДЦ. Для управления частотой генерируемых магнетроном колебаний в смесителе СМ-1 устройства АПЧ выделяется разностная частота, номинальное значение которой равно промежуточной частоте приемника. На СМ-1 колебания подаются от магнетрона через аттенюатор Ат. и стабильного гетеродина СГет., собранного на клистроне со стабилизирующим частоту объемным резонатором. Сигнал разностной частоты поступает на усилитель-ограничитель промежуточной частоты УОПЧ, а затем на частотный дискриминатор ЧД, настроенный на промежуточную частоту. Сигнал ошибки по частоте управляет механизмом настройки магнетрона. Поскольку полоса пропускания АПЧ обеспечивает подстройку только при уходах частоты магнетрона, не превышающих 15 МГц, в ПРЛ иногда предусматривают устройство поиска по частоте. Точность подстройки частоты магнетрона составляет ±0, 25 МГц. Канал основного усиления сигнала содержит смеситель СМ-2, на который подаются отраженные сигналы с АП и колебания СГет., усилитель промежуточной частоты УПЧ и амплитудный ограничитель АО. При работе ПРЛ в режиме без СДЦ сигналы с УПЧ детектируются (на схеме детектор включен в УПЧ) и через суммирующее устройство СУ подаются на индикаторы. При использовании СДЦ сигналы поступают на АО, где устраняются амплитудные флуктуации, ухудшающие работу устройства СДЦ. Приемники современных ПРЛ имеют коэффициенты шума 3, 3 — 12 дБ и усиления по основному каналу 80 дБ. Находящийся обычно в приемнике когерентный гетеродин КГ устройства СДЦ запускается синхроимпульсами ПРЛ перед началом генерации магнетрона и фазируется колебаниями магнетрона, поступающими на него из УОПЧ устройства АПЧ. Колебания КГ с частотой, равной промежуточной частоте, используют в качестве опорных при фазовом детектировании принятых сигналов, которые поступают на ФД с амплитудного ограничителя. Устройство черезпериодного вычитания предназначено для задержки сигнала на период повторения импульсов и образования разности задержанных и незадержанных импульсов. В ПРЛ обычно применяют два периода повторения, которые переключаются от импульса к импульсу. Видеоимпульсы с ФД подаются на модулятор линии МЛ и далее в виде амплитудно-модулированных колебаний с несущей частотой 15 МГц на ЛЗ. Сигналы с ЛЗ-1 и ЛЗ-2 через коммутатор К поступают на УВЧ, детектор Д1, а затем на устройство вычитания УВ. Коммутатор управляется синхроимпульсами ПРЛ. С модулятора линии снимается также незадержанная последовательность импульсов, которая после детектора Д-2 поступает на УВ. Такое построение тракта прохождения сигналов облегчает получение идентичных по форме импульсов на входе УВ. Для этой же цели служит и устройство автоматической регулировки усиления АРУ, работающее по разности амплитуд задержанных и незадержанных сигналов и выравнивающее эти амплитуды изменением коэффициента усиления УВЧ. С выхода УВ сигналы подвижных целей в виде модулированной по амплитуде импульсной последовательности поступают в режиме работы с СДЦ на суммирующее устройство СУ. Коэффициент подавления помех от не подвижных целей и СДЦ составляет 20 -25 дБ. Синхронизатор служит для получения импульсов, управляющих работой ПРЛ, а также контрольных импульсов, предназначенных для настройки устройства СДЦ. Основной элемент синхронизатора — блокинг-генератор БГ имеет частоту собственных колебаний много меньше частот повторения импульсов ПР. При включении синхронизатора первым импульс БГ через формирователь импульсов ФИ поступает на модулятор линии МЛ, а затем на одну из линий задержки ЛЗ. После усиления в УВЧ и детектирования этот импульс вместе с отраженными сигналами, поступившими на МЛ от ФД, подается на амплитудный селектор АС, где выделяется больший по амплитуде импульс БГ, который и образует первый циркулирующий в петле синхронизации импульс. Этот импульс через стробирующий каскад запускает БГ. При этом формируется второй циркулирующий импульс и т. д. Циркулирующие импульсы, временная расстановка которых определяется задержкой в соответствующей ЛЗ, используются для синхронизации передатчика и других элементов ПР. Стробирующий каскад СК после генерации очередного импульса БГ запирается импульсом мультивибратора МБ на время, большее половины периода повторения синхроимпульсов. Такая мера предотвращает запуск БГ случайными импульсами, возникшими, например, из-за коммутационных процессов. Тракт передачи сигналов обеспечивает трансляцию сигналов, необходимых для работы выносных индикаторов, устанавливаемых обычно на КПД. На КПД транслируются видео- и синхроимпульсы, угловые метки и напряжения с сельсинов, несущие информацию об угловых положениях АК и АГ. В аппаратную ПРЛ с КДП передается переменное напряжение частотой 10 кГц для питания сельсинов-датчиков угловой информации. Трансляция осуществляется по кабельной линии длиной до 3 км. Видеоимпульсы с выхода ПУ (при работе без СДЦ) или с УЧПВ (при работе с СДЦ) поступают на суммирующее устройство СУ, куда подаются и синхроимпульсы с модулятора передатчика. СУ коммутирует и усиливает в зависимости от выбранного режима видеоимпульсы, соответствующие всем или только движущимся целям, и смешивает их с большими по амплитуде синхроимпульсами. Полученный суммарный сигнал видео- и синхроимпульсов поступает после усиления в кабельном усилителе КУ по кабельной линии на устройство обработки сигнала УОС, установленное на КДП. Устройство обработки сигналов располагается на расстоянии до 3 км от аппаратурной ПРЛ и содержит блоки, выделяющие и коммутирующие подаваемые с аппаратной сигналы, а также вырабатывающие вспомогательные сигналы для индикаторов КДП и для аппаратуры ПР. УОС управляет работой ПР и контролирует ее. Для выделения синхроимпульсов применяют амплитудные селекторы, гак как эти импульсы в 2 раза превосходят видеоимпульсы по амплитуде. Один из основных узлов УОС — аналоговый вычислитель линий, отображающих на индикаторах заданные траектории посадки в вертикальной и горизонтальной плоскостях, и линий равных отклонений от этих траекторий. Необходимость применения вычислителя обусловлена сложной конфигурацией отображаемых на индикаторах кривых, что является следствием смещения антенн ПРЛ относительно оси ВПП и расчетной точки приземления ТП. Индикаторные устройства отображают необходимую для контроля посадки информацию. В состав ПРЛ входят основные индикаторы ОИ, устанавливаемые на рабочих местах диспетчеров КДП, и контрольный индикатор КИ, размещаемый в аппаратной ПРЛ. В состав каждого из индикаторов входит электроннолучевая трубка ЭЛТ; видеоусилитель, сигналы с выхода которого управляют яркостью ЭЛТ; каскады формирования напряжений развертки по углу и дальности, а также источники питания и вспомогательные устройства. На прямоугольном экране ЭЛТ формируются изображения рабочих секторов каналов глиссады и курса при данном угловом положении антенн ПРЛ и отметки, соответствующие ВС, находящимся в данных секторах. Изображения воспроизводятся в прямоугольных координатах «угол места — наклонная дальность» и «азимут — наклонная дальность». Каскады формирования развертки по углу представляют собой усилители постоянного тока, на вход которых подается напряжение угловой информации с УОС, Это напряжение получается в результате детектирования сигналов частоты 10 кГц, передаваемых с сельсинов-датчиков углового положения антенн ПРЛ. Фаза колебаний частоты 10 кГц при выделении сгибающей определяется ключевыми фазовыми детекторами, управляемыми импульсами, которые формируются из синусоидальных напряжений возбуждения сельсинов. Так как рабочие участки секторов сканирования антенн соответствуют движению антенн с постоянной угловой скоростью, то выделенные огибающие сигналов сельсинов-датчиков представляют собой линейно изменяющееся (пилообразное) напряжение с периодом» равным периоду сканирования антенны. Это напряжение после усиления используется для вертикального отклонения луча ЭЛТ. Каскады формирования развертки по дальности запускаются задержанными синхроимпульсами и вырабатывают отклоняющие напряжения экспоненциальной формы. С помощью задержки синхроимпульсов начало развертки (отметка нулевой дальности) совмещается с точкой, соответствующей расчетной точке приземления ВС. Экспоненциальный закон изменения напряжения горизонтальной развертки позволяет получить нелинейный масштаб по дальности с растянутым начальным участком. При этом облегчается контроль положения ВС на завершающем этапе захода на посадку. Считывание информации облегчается наличием одно- и пятикилометровых меток дальности. Для контроля положения ВС на экране основных индикаторов высвечиваются линии, соответствующие заданному положению ЛГ и ЛК, и линии равных отклонений от них. Основные индикаторы получают сигналы от УОС, расположенного на КДП, и отображают всю информацию, необходимую для работы диспетчера. Контрольный индикатор предназначен для контроля работоспособности ПРЛ. В аппаратуре индикатора осуществляются те же преобразования сигналов, что и в УОС, за исключением формирования ЛГ и ЛК и линий равных отклонений. На этом индикаторе отображаются только отметки от ВС, находящиеся в секторе обзора ПРЛ, и угловые метки. Требования, предъявляемые к ПРЛ
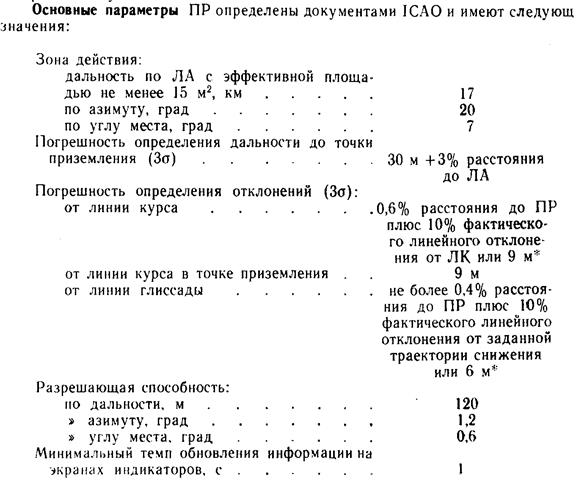
К посадочным радиолокаторам предъявляются определенные требования по зоне обзора, выбору позиции при размещении их на аэродроме, точности определения координат, разрешающей способности и скорости обновление информации. Посадочные радиолокаторы должны обеспечивать обнаружение ВС, имеющих площадь отраженной поверхности 15 м2 или более, и определение их местоположения в пространстве, ограниченном сектором обзора по азимуту 20 и углу места 7° на расстоянии не менее 17 км от радиолокатора. Посадочный радиолокатор устанавливается на аэродроме позади точки приземления в направлении взлетного конца ВПП на расстоянии 915 м или более и 1200 м или более при смещении ПРЛ в сторону от оси ВПП соответственно на 1-20 м и 185 м при необходимости обеспечения сектора обзора по азимуту в пределах ±10(20)°, а в пределах ±15 В зависимости от особенностей аэродрома и оснащенности его радиотехническим оборудованием используется тот или другой вариант размещения ПРЛ. Для всех рассмотренных случаев необходимо, чтобы посадочный радиолокатор обеспечивал обзор пространства в секторе, начинающемся в точке, расположенной на расстоянии 150 м от точки приземления в направлении взлетного конца ВПП, азимутальный угол составлял ±5° по отношению к осевой линии ВПП, а угол места - от -1 до +6°. Посадочные радиолокаторы позволяют при посадке определить отклонения ВС вправо и влево от линии курса, вверх и вниз от заданной траектории снижения (глиссады) и удаление от места размещения радиолокатора. Предъявляются следующие требования к точности определения местонахождения ВС. При отклонениях от линии курса: — допустимая погрешность составляет 0, 6% от расстояния ВС до ПРЛ плюс 10% от величины отклонения от линии курса, или 9 м (берется большая величина); — погрешность в точке приземления не превышает 0, 3% расстояния от антенны, или 4, 5 м (берется большая величина); При отклонениях от линии глиссады: — допустимая погрешность составляет 0, 4% от расстояния ВС до ПРЛ плюс 10% от величины отклонения от линии глиссады, или 6 м (берется большая величина); — погрешность в точке приземления не превышает 0, 2% от расстояния до ПРЛ, или 3 м (берется большая величина). Допустимая погрешность определения удаления воздушного судна от точки приземления не должна превышать 30 м + 3% от расстояния ВС до точки приземления. Разрешающая способность радиолокатора при определении положения двух ВС по азимуту и углу места составляет соответственно 1, 2 и 0, 6°. Разрешающая способность радиолокатора при определении расстояния между двумя воздушными судами при одном и том же азимуте составляет 120 м. Скорость обновления информации должна быть такой, чтобы информация обновлялась ежесекундно. Для обеспечения высокой надежности ПРЛ предусматриваются высокоэффективные средства контроля работоспособности с автоматическим включением резерва и отключением отказавших элементов. Должны быть соблюдены и требования электромагнитной совместимости посадочных радиолокаторов с другими радиотехническими системами аэропортов: посадочный радиолокатор, радиотехнические средства связи, навигации и УВД не должны создавать взаимных помех.
|
Последнее изменение этой страницы: 2020-02-17; Просмотров: 173; Нарушение авторского права страницы
 5(20)° - на расстоянии 685 и 915 м при смещении ПРЛ в сторону от оси ВПП соответственно на 120 м и 185 м.
5(20)° - на расстоянии 685 и 915 м при смещении ПРЛ в сторону от оси ВПП соответственно на 120 м и 185 м.