|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Раздел 2. Функциональные узлы комбинаторного типаСтр 1 из 12Следующая ⇒
Раздел 2. Функциональные узлы комбинаторного типа Тема 2.1.. Основные положения алгебры логики. Тема2.2. Схемотехническая реализация логических операций. Тема2.3. Арифметические устройства Раздел 3. Функциональные узлы последовательного типа Тема 3.1. Триггерные устройства. Классификация. Основные сведения Тема3.2. Регистры и регистровые файлы Тема3.3. Двоичные счетчики Раздел 4. Запоминающие устройства. Тема4.1. Основные структуры адресных запоминающих устройств. Тема4.2. Статические оперативные запоминающие устройства. Тема4.3. Динамические оперативные запоминающие устройства. Тема4.4. Постоянные и репрограммируемые запоминающие устройства. Раздел 5. Микропроцессоры: архитектура и структурное построение Тема5.1. Функционально-структурные особенности микропроцессоров Тема5.2. Формат команд центрального процессора. Режимы адресации. Тема5.3. Процессоры со сложным набором команд (CISC-процессоры). Раздел 6. Микропроцессорные системы. Тема6.1. Взаимодействие центрального процессора с памятью МП-системы и устройствами ввода/вывода. Тема6.2. Магистрально-модульная структура микропроцессорных систем. Тема6.3. Подсистема ввода/вывода в системах с магистрально-модульным интерфейсом. Тема6.4. Архитектура интерфейса и режимы обмена данными с устройствами ввода/вывода.. Раздел 7. Обзор микропроцессорных систем и средств вычислительной техники. Тема7.1. Универсальные процессоры.Область применения.. Тема7.2. Микроконтроллеры.. Тема7.3. Цифровые процессоры сигналов.. Тема7.4. Матричные процессоры и параллельные ЭВМ.. Тема7.5. Сети процессоров. Транспьютерные сети. 5.2 Краткое описание содержания теоретической части разделов и тем дисциплины Лекции Структуры ЭВМ Модульное умножение. Модульное произведение может быть реализовано двумя способами: 1. Параллельный модульный умножитель (на примере схемы К588ВР2).
На структуре МД - формирователь магистрали данных, СС - сигналы синхронизации, БС - блок синхронизации, РА, РВ - шестнадцатиразрядные регистры сомножители, МУ - блок модульного умножения, РП1, РП2 -шестнадцатиразрядные регистры произведения, БФП - блок формирования признаков. Алгоритм работы. 1. Внешнее устройство - процессор выставляет первый сомножитель на линии Д (разрядность магистрали данных 16) и синхросигналы записывают его в регистр А. 2. Процессор выставляет второй сомножитель, и синхросигналы записывают его в регистр В. 3. После чего блок модульного умножения получает операнды, и после завершения процедуры умножения записывает тридцатидвухразрядный результат в пару регистров РП1, РП2, а также в блок формирования признаков, который оснащён собственным регистром, хранящий флаги особых ситуаций (например, равенство результата 0, арифметическое или знаковое переполнение). 4. Процессор через магистраль данных читает информацию БФП. 5. По результатам анализа данных на предыдущем шаге читается или не читается информация из РП1 и РП2 (последовательно). 2. Последовательное модульное умножение. Для осуществления последовательного модульного умножения один из сомножителей представляется в параллельном коде, а второй - в последовательном. Это бывает полезно для реализации операции умножения значения изменяющегося сигнала на константу. Данные, приходящие с блока аналога цифрового преобразователя, как правило, идут в последовательном коде, поэтому в последнем умножителе можно совместить два процесса: получение данных и умножение. Основой модульного умножения является " дерево сумматоров". Здесь действует принцип дихотомии - делим на два. В полученном результирующем сумматоре будет последовательный код.
Структура одного элемента " дерево сумматоров". В качестве ядра элементов используется полный сумматор, входы которого оснащены триггерами защелками, срабатывающими в конце каждого временного интервала.
Произведение выполняется в 16 тактов Шаг 1: регистры А и B обнуляются. Шаг 2: в регистр А1 заносится разряд А1, в триггер В1 старший бит числаВ. Шаг 3: получаем произведение двухразрядных чисел с помощью логического " и". Шаг 4: формируем тактовый импульс для обеспечения работы " дерево сумматоров". Шаг 5: записываем А2 и сдвигаем В. Шаг 6: выполняем 8 тактов работы схемы со сдвигом регистра В. На освобождающиеся разряды записываем нолики. Кроме аппаратных способов реализации процедуры умножения, часто используется микропрограммные процедуры, основанные на методе сложения и сдвигов (умножения столбиком). Структуры ЭВМ Форматы команд. Команды в ЭВМ бывают: 1. Безадресные. В качестве операнда данных команд используется 2. Одноадресные (многоадресные).
Алгоритм исполнения трёхадреснои команды: 1. По адресу расположения команды процессор считывает код операции. 2. Процессор анализирует код операции (определяет состав операндов и 3. По следующему адресу процессор считывает адрес первого операнда. 4. Процессор читает значение операнда по адресу 1. 5. Процессор считывает адрес 2. 6. Процессор читает операнд по адресу 2. 7.Процессор выполняет указанную в COP операцию над считанными 8. Процессор считывает адрес 3. 9. Процессор записывает результат операции по адресу 3. CISC и RISC архитектуры процессора. (FRISC). CISC - процессоры с полной (сложной) системой команд (Complex interaction set computer). В данных процессора операции производятся над числами, хранящимися в АЗУ. RISC - процессоры с сокращенным набором команд. Особенности: операции выполняются над числами, записанными во внутренних регистрах процессора, объединенных в так называемый регистровый файл, при этом адреса операндов располагаются в поле COP. R1=R1+R2 COP=R1+R2 Это возможно за счет сокращения объема адресуемой памяти операндов. В RISC компьютеров все команды безадресные. 1MHZ=1MIPS (миллион операций в секунду). Недостатки: 1. За каждый такт выполняется одна инструкция 2. Ограничение по длине команды и по количеству команд. FRISC - это RISC процессоры, оперирующие не с регистровым файлом, а со стеком. Стек работает по принципу FILO - первый вошел - последний вышел.
Данная архитектура также называется нольоперандной архитектурой или Forth RISC. В настоящее время CISC и RISC архитектуры подвергаются процессу конвергенции (взаимослияния). Элементы с третьим состоянием выхода или трёх стабильный элемент Высокоимпедансное состояние - высокоомное состояние, оно же z-состояние, либо третье состояние. Это состояние характеризуется отключение выхода элемента от всех внутренних цепей микросхемы.
1. Если ключ SW1 замкнут, тогда на выходе будет напряжение питания 2. Если SW1 разомкнут, SW2 замкнут, то на выходе 0. 3. Если SW2 и SW1 замкнуты, то короткое замыкание. 4. Если SW2 и SW1 разомкнуты, то на выходе третье состояние. У элемента с третьим состояние выхода или буферного состояния, как правило два входа: информационный и разрешения.
Если на входе E логический ноль, это означает переключение элемента в высоко импедансное состояние. На выходах элементов E будет всегда 0. Оба ключа разомкнуты. В случае если E=1, управляющая единица появляется на выходе только одного элемента.
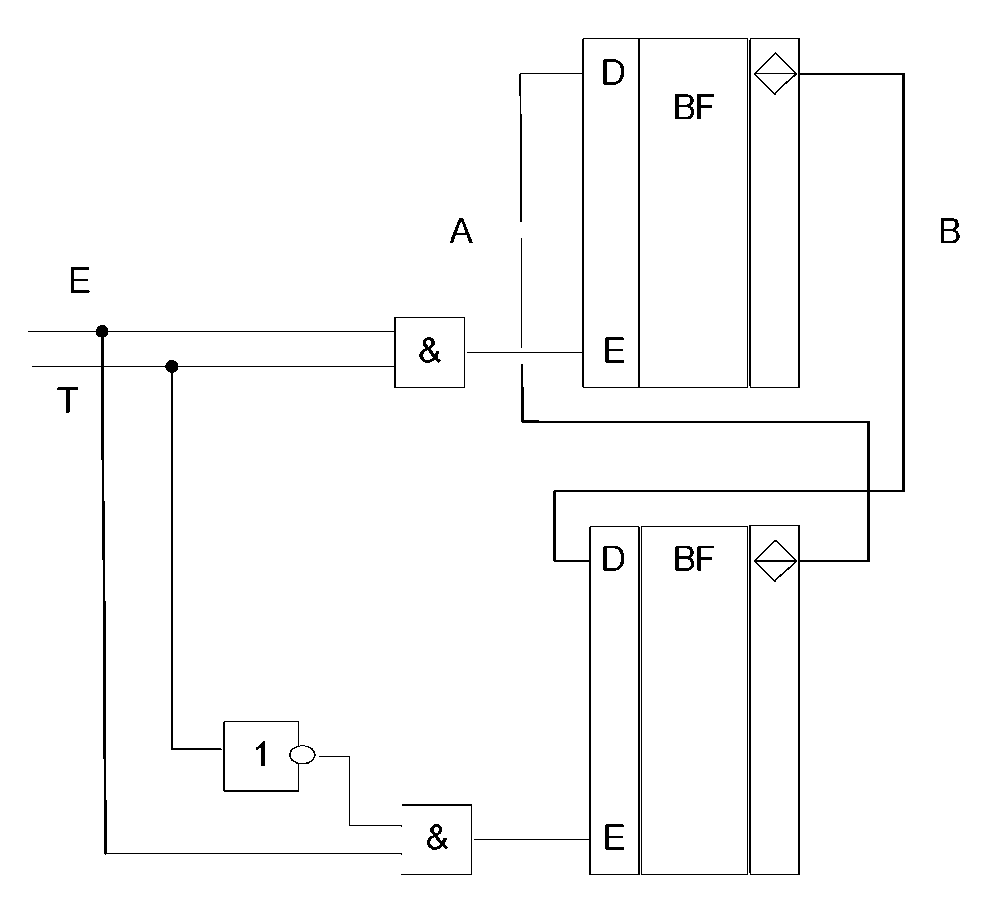
Высоковольтное состояние соответствует 0. Двунаправленный элемент. Предназначен для организации магистралей, способных как принимать, так и передавать информацию. Элемент имеет 3 входа: 1.Вход - выход данных. 2. Линия, определяющая направление передачи. 3. Линия разрешения и один выход (двунаправленный).
BF - шинный формирователь. Е=0: передачи не ведется, линии А и В разомкнуты. Е=1: сигнал Т выбирает, какой из шинных формирователей будет открыт. Если Т=1, откроется первый, передача от А к В. Если Т=0, откроется второй, передача от В к А.
Микросхемы шифраторов и дешифраторов. Наиболее распространенный дешифратор выполняет преобразование двоичного числа (числа в двоичной системе счисления) в число в унарном коде. Унарный код - это такой код, в котором активный уровень сигнала присутствует только на одной линии. В зависимости от активного уровня различают прямой и инверсный унарные коды. Пример чисел в унарном коде: 0 - 0001 1 - 0010
н-1^ - инверсный код - вход выбор кристалла. Данный сигнал присутствует у большинства периферийных микросхем. В том случае, если сигнал CS равен 0, микросхема исполняет свой функции, иначе, если CS равен 1, микросхема полностью отключается от входных и выходных цепей (если есть третье состояние выходы переходят в третье состояние, если нет, тогда в пассивное). Шифратор Шифратор преобразует унарный код в двоичный. Выделяют два вида: приоритетный и неприоритетный. Для неприоритетного шифратора в качестве входного разрешается строго унарный код. Для приоритетного разряды входного числа имеют приоритет, то есть выходное число будет преобразовано, только самая младшая единица.
Значение выхода определяет значение первого входа. На входы АО и А1 подается число определяющая номер входа, информация с которого будет передана на выход.
Сигнал W предназначен для записи числа, пришедшего на входы регистра, во внутренние триггеры, после чего данное число выдается на выходы. Если сигнал W не активен, регистр хранит предыдущее в него записанное число. Магистрали ЭВМ. Как правило, магистраль ЭВМ состоит из трех шин: шина данных, шина адреса, шина управления. Шина - это совокупность проводников, предназначенных для передачи двоичных разрядов, объединенных общим функциональным назначением. Магистраль ЭВМ может быть организована двумя способами: 1. Магистраль с разделенными шинами адреса и данных. 2. Магистраль с совмещенными шинами адреса и данных. Магистраль с разделенными шинами адреса и данных. В состав данной магистрали входит шина данных, шина адреса, шина управления. В шине управления, как правило, присутствуют следующие сигналы: 1. Готовность адреса (выдается процессором) 2. Готовность данных (выдается приемником - передатчиком 3. Запись данных. 4. Чтение данных. Алгоритм записи по магистрали с разделенными шинами. 1. Процессор выставляет на шину адреса адрес приемника. 2. Процессор выдает сигнал готовность адреса. 3. Процессор выдает на шину данных информацию. 4. Процессор выдает сигнал записи. 5. Процессор ожидает определенное время, либо дожидается прихода сигнала готовность данных от приемника. 6. Конец алгоритма: процессор снимает адрес, данные, переводит данные шины в третье состояние. Алгоритм чтения. 1. Процессор выдает адрес на шину адреса. 2. Процессор выдает сигнал готовность адреса. 3. Процессор выдает сигнал чтения. 4. Процессор ожидает некоторое время или ожидает сигнал готовность 5. Процессор читает переданное источником число на шину данных. 6. Процессор убирает адрес и сигналы управления. Конец. Структура подключения нескольких источников, приемников информации к магистрали с разделёнными шинами адреса и данных.
Магистраль с мультиплексированными (совмещенными) шинами адреса и данных. Магистраль состоит из двух шин: 1. Совмещенная шина адреса и данных. 2. Шина управления. Преимущества совмещения: меньше аппаратных затрат. Алгоритм записи по данной магистрали. 1. Процессор выставляет адрес на шину адреса данных. 2. Процессор выдает готовность адреса. 3. Процессор ожидает некоторое время, необходимое для заполнения приемником адреса. 4. Процессор убирает сигнал готовность адреса. 5. Процессор убирает адрес с шины адреса данных и выдает на неё записываемые данные. 6. Процессор выдает сигнал записи. 7. Процессор ожидает некоторое время или ожидает приход сигнала готовность данных от приемника информации. 8. Процессор освобождает магистраль. Алгоритм чтения. 1. Выдача адреса. 2. Выдача готовности адреса. 3. Ожидание. 4. Перевод ШАД в состояние ввода сигнала (на чтение). 5. Выдача сигнала чтения. 6. Ожидание готовности данных. 7. Чтение числа с ШАД выданного источником информации. 8. Отключение магистрали. Способ реализации магистрали с совмещенными шинами адреса - данных.
Данные с ШД приходят одновременно на информационные входы обоих регистров. Также на входы записи регистров приходит сигнал записи от процессора. Запись в регистр будет осуществлена по приходу сигнала записи только в том случае, если вход CS равен 0. Сигналы CS подаются с дешифратора адреса, на вход которого подается (как правило, часть) Подключение нескольких приемников информации к системноймагистрали.
Выходы всех источников информации должны быть трех стабильные, то есть иметь возможность переключения в высокоимпедансное состояние, для того чтобы неактивные источники информации не мешали единственному активному. Так как в данной структуре объединены адресные линии обеих ПЗУ, то информация, с какой ПЗУ будет выдана на ШД, определяется дешифратором адреса, которая включается в момент прихода сигнала чтения. Состав внутренних функциональных устройств микропроцессора. 1. Арифметически - логическое устройство. Предназначено для выполнения арифметических (+-*/) и логических (и, или, не, исключающее или, сдвиги) операций. Выбор конкретной операции выполняемой АЛУ осуществляется в момент анализа кода операции (смотри лекцию форматы команд). 2.Основой микропроцессора является аккумулятор - регистр подключенный непосредственно к выходу АЛУ. Используется как регистр источника и приемника данных (CISC). 3. Группа регистров общего назначения. Регистровый файл в RISC машинах - это набор регистров, которые программист может использовать по своему усмотрению. 4. Счетчик команд - это регистр, предназначенный для хранения адреса команды (в этом регистре лежит адрес, по которому расположен код текущей операции). 5. Регистр команды предназначен для хранения кода операции 6. Регистр состояния содержит биты флагов состояния (примеры флагов: равенство 0 результата операции, отрицательный результат, переполнение и тому подобное). 7. Регистр адреса предназначен для хранения адресов операндов или результата, который выдается на ША. 8. Устройство управления предназначено для организации совместной работы всех других блоков.
2. Структура ЭВМ с общей магистралью. Для передачи информации используется одна единственная магистраль.
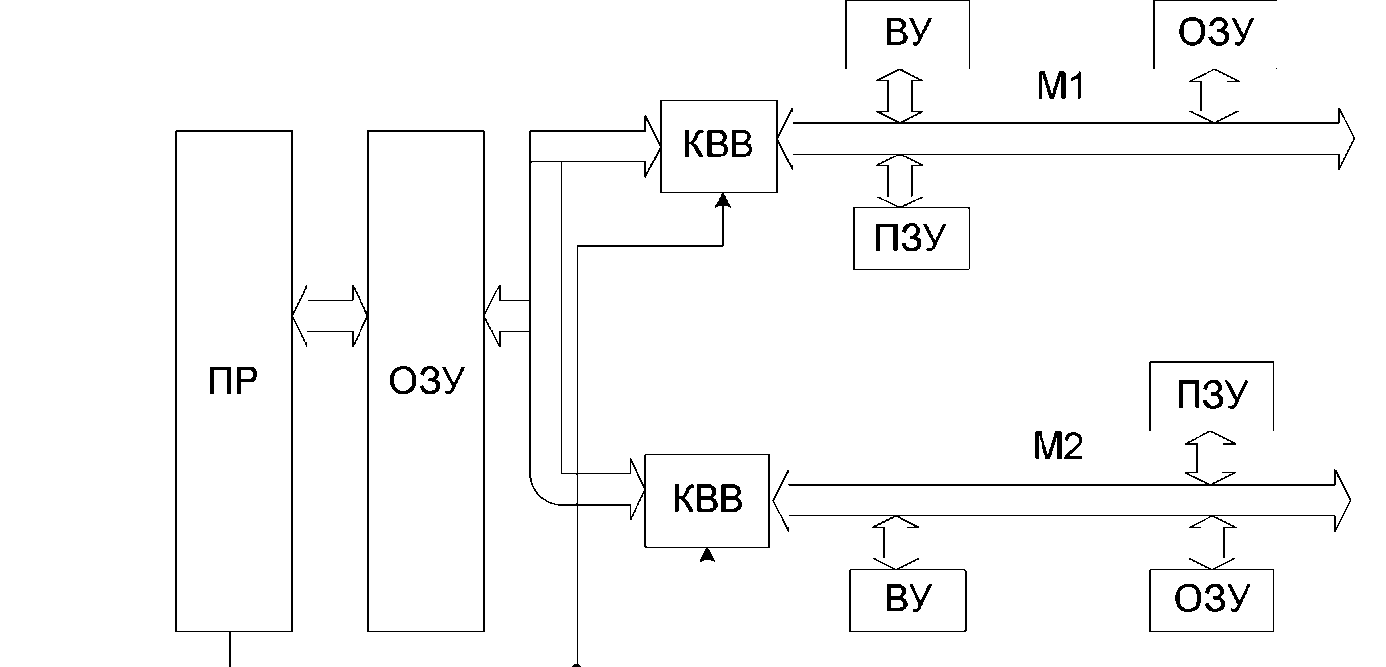
ОМ - общая магистраль. Особенность: в каждый момент времени по общей магистрали может передаваться информация только от одного источника. Все остальные источники для передачи своей информации вынуждены ожидать, когда общая магистраль будет освобождена. Преимущества: простота аппаратной реализации. Недостаток: сравнительно низкая скорость обмена данными. 3. Структура ЭВМ с разделенными магистралями.
КВВ - контролер ввода вывода. В данной структуре работа магистрали может осуществляться параллельно, в том числе без участия процессора. Преимущества: высокая скорость. Недостаток: сложность аппаратной и программной реализации. Внешнее устройство (периферийное). 1. Адаптер - это собирательное название модулей или устройств ЭВМ Адаптер магистрали (мост или репитор - повторитель) предназначен для физического сопряжения (репитор - усиление мощности сигнала) или логического сопряжения (мост - преобразование протоколов) двух магистралей. 2. Интерфейс - это совокупность аппаратных и программных средств Протокол - это документ, в котором описывается алгоритм работы интерфейса. 3. Таймеры. В ЭВМ существует несколько типов таймеров: а) часы реального времени, которые реализуются как обычные б) таймеры - счетчики могут быть использованы для подсчета в) сетевой таймер. Его работа основана на контроле напряжения питания
Интеграл синусоидального шума равен за его период равен 0.
К шине процессора подключается Северный Мост, ОЗУ и контролер AGP. К шине PCI подключается Южный Мост, который обслуживает IDE (до 4 жестких дисков), как правило, два последовательных интерфейса USB и часы реального времени RTS. К шине ISA подключается устройство информационного обмена Super I/O, которое позволяет подключать последовательные интерфейсы COM, параллельный порт для подключения принтера LPT и накопители на гибких дисках FDD, клавиатура, мышь и микросхема ПЗУ - BIOS. Виды технологий производства интегральных микросхем. Все технологии производства делятся на биполярные и полевые. 1. В биполярных технологиях в качестве основного элемента используется биполярный транзистор. Биполярные транзисторы бывают двух типов n-p-n и p-n-p.
Транзистор управляется с помощью тока. В силу этого у него высокое быстродействие, в силу малой емкости базового перехода, но высокое потребление электроэнергии. На основе этой технологии изготовляется статическая оперативная память компьютера, КЭШ память. Транзистор изготовляется на основе проводников, что приводит к низкой плотности элементов на кристалле, то есть КЭШ очень быстродействующая, но дорогая и электропотребляемая. Топология биполярного транзистора.
Si - легированный (отравленный) кремний - полупроводник. 2. Полевые технологии основаны на использовании полевых транзисторов, которые управляются, в отличии от биполярных транзисторов, полем или напряжением. Полевые транзисторы более технологичны, плотность элементов на кристалле с их использование гораздо выше, чем у биполярных технологий. Существует большой выбор различных типов полярных транзисторов, однако высокая емкость управляющего электрода снижает быстродействие полевого транзистора. Полевые транзисторы используются для построения процессора чаще, чем биполярные. 1. Полевой транзистор с управляющим p-n переходом. Данный тип транзистора изготавливается, так же как и биполярные транзисторы в объеме полупроводника. Большинство полевых транзисторов имеют следующие выводы: а) затвор - вывод напряжения, на котором управляет работой б) в) сток и исток - выводы сопротивления, между которыми зависит Для транзистора с управляющим p-n переходом затвор не является изолированным.
В зависимости от запирающего напряжения приложенного к затвору вокруг p-областей затвора возникают зоны, обедненные основными носителями в области сток - исток. Площадь перехода сток - исток будет уменьшаться в зависимости от величины приложенного к затвору напряжения. Площадь уменьшается - сопротивление растет. Преимущество: низкая емкость затвора, высокое быстродействие. Недостаток: низкая технологичность изготовления. Используется редко. 2. МДП-транзисторы (металл - диэлектрик - полупроводник) МОП транзисторы (металл - окисел - полупроводник) Затвор данного типа транзистора выполнен в виде изолированной металлической пластины, расположенной над проводящим каналом в полупроводниковой пластине. В зависимости от напряжения приложенного к затвору основные носители этого канала или привлекаются или оттесняются в массив полупроводника, стало быть, изменяется сопротивление между стоком и истоком. Преимущество: весьма технологическая вещь. Недостаток: между затвором и полупроводником образуется " паразитная емкость" в силу чего процесс переключения транзистора замедляется.



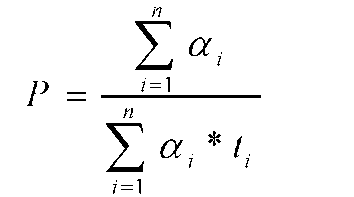
Факторы, учитываемые при выборе микропроцессорной техники. Все факторы можно разделить на 3 группы: 1. Факторы функциональности, характеризующие функциональные 2. Эксплуатуционые факторы, характеризующие удобство использования микропроцессора. 3. Производственные факторы, характеризующие процесс производства и приобретения микропроцессорной техники. 1. Первая группа включает в себя факторы: а) время выполнения простейших операций, может характеризоваться б) число команд. в) количество регистров общего назначения или объем регистрового г) разрядность: АЛУ, шины данных, шины адреса. д) наличие блоков АЗУ или энергонезависимой памяти в составе е) наличие КЭШ памяти. ж) наличие встроенных преобразователей, таймеров, счетчиков и так далее. з) длина команды. и) возможность аппаратных прерываний и их количество. 2. Вторая группа факторов включает в себя: а) количество напряжения питания б) потребляемая мощность. в) температурные ранги кристалла. г) наличие необходимого инструментального программного д) наличие наборов " быстрого старта". е) наличие эмулятора процессора. Эмулятор процессора - это ж) наличие систем питания з) наличие операционной системы. и) количество необходимых микросхем сопровождения или объем 3. Третья группа факторов включает в себя: а) технология производства. б) стоимость кристалла (чипсета). в) сроки поставки. г) деловая репутация фирмы поставщика. д) наличие необходимого инструментария для монтажа, демонтажа и е) простота архитектура вычислительной системы. Алгоритм работы микропроцессора. 1. Определяет область применения микропроцессора (требования к нему). 2. Определяет необходимые факторы выбора 3. Определяется список фирм поставщиков микропроцессорной 4. Анализ общего списка на соответствие общим требованиям. 5. Производится детальный анализ конкретных типов микропроцессора Критерии выбора. 1. Выбор микропроцессора по критерию производительности. а) PDR - скорость обработки данных, которая вычисляется PDR=n*v, f0 - анализ по тактовой частоте.
а i - вес алгоритмического действия (i например количество выполнений данной команды за один проход алгоритма с учетом цикла). б) метод смесей команд. Данный метод учитывает время выполнения
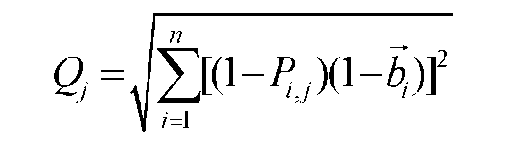
Выбирается тот процессор, у которого значение P больше. Недостаток и ограничение использования метода: необходимость уже готового алгоритма обработки данных. 3. Выбор микропроцессора по критерию критического уровня. Технический уровень - это относительная характеристика качества изделия, основанная на сопоставление значения показателей, характеризующих техническое совершенство оцениваемого изделия с соответствующими базовыми значениями. Значение данного критерия это евклидово расстояние между эталоном и анализируемым устройством. Критерий вычисляется по следующей формуле:
Способ определения весовых коэффициентов. 1. Как правило, весовые характеристики определяются с помощью метода экспертных оценок, при котором собирается коллегия экспертов, которая назначает вес фактора, либо согласованным решением, либо с помощью определения среднего веса фактора, в последующем значения весовых характеристик нормализуются.
2. Метод косвенных экспертных оценок. Метод основан на анализе технической литературы, на мотив определения частоты упоминания названий факторов. Недостаток: при использовании поисковых роботов Internet процесс частотности упрощается, однако следует контролировать контекст упоминания. Обобщенная структура ЭВМ Простейшая структура ЭВМ с локальными шинами между ее устройствами, приведена на рисунке 1.4.1.
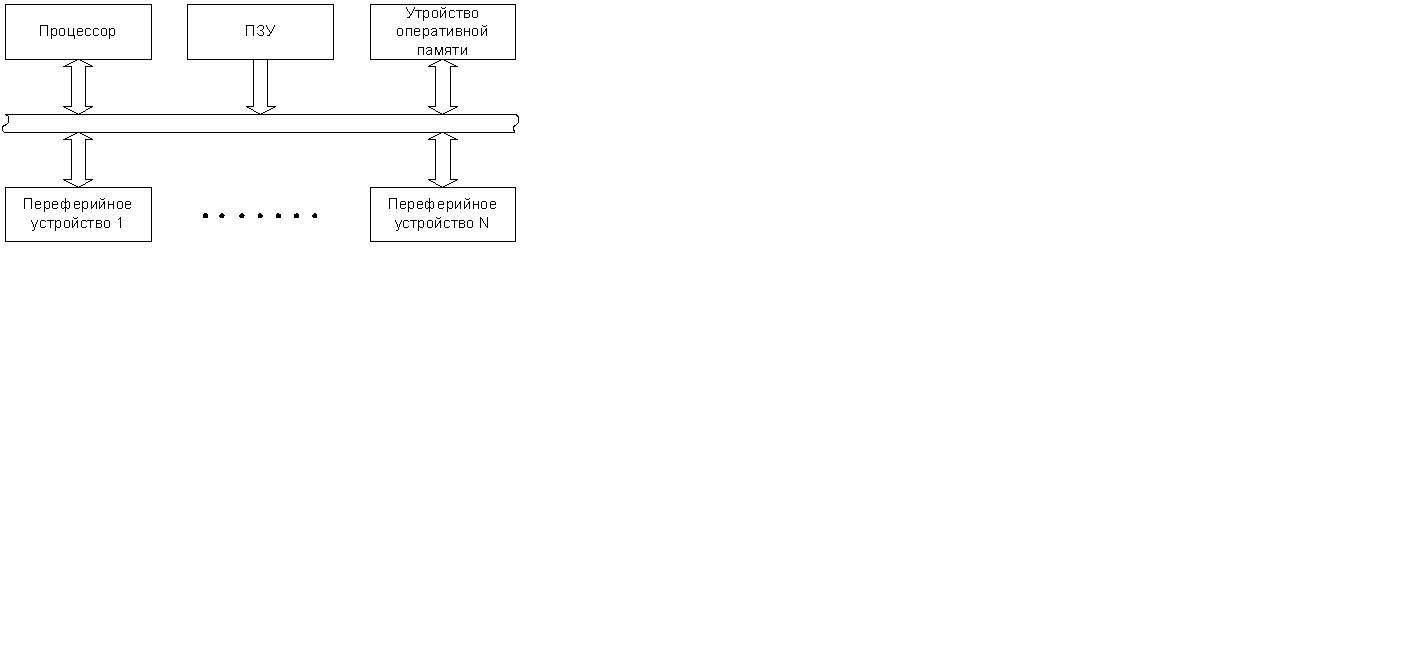
В состав ЭВМ входят: - оперативное запоминающее устройство (ОЗУ, более короткое обозначение- оперативная память ОП); - процессор; - устройство ввода- вывода (УВВ, другое обозначение- периферийное устройство ПУ); - пульт контроля и управления (ПКУ). Процессор предназначен для обработки информации. Он состоит из 2-х частей: УУ - устройство управления (управляющий автомат), и АЛУ - арифметико-логическое устройство. Обработку информации процессор осуществляет под управлением программы, хранящейся в ОЗУ. В ОЗУ наряду с программой также хранятся и данные, подлежащие обработке. Программа и данные поступают из ОЗУ в процессор по каналу связи между ОЗУ и процессором, называемым в вычислительной технике шиной. Такие же шины соединяют процессор и с другими устройствами ЭВМ. УВВ предназначено для ввода программ и данных в ОЗУ, то есть они сначала подготавливаются либо в виде перфокарт (ПФК), перфолент (ПФЛ), либо в виде магнитных лент, магнитных дисков и т.п., а затем вводятся в ОП машины. После этого программа запускается на обработку. В современных машинах диалогового режима данные в ОП могут заноситься и непосредственно с клавиатуры. ПКУ предназначен для ручного пуска различного рода тестовых программ, контроля хода вычислительного процесса или функционирования устройств ЭВМ. Структура ЭВМ на основе общей шины
Рисунок 1.4.2- Структура ЭВМ на основе ОШ Взаимодействие между всеми устройствами ЭВМ осуществляется в режиме разделения времени общей шины (т.е. поочередно). Такой способ не обеспечивает (принципиально) высокой пропускной способности, ввиду чего производительность ЭВМ ниже, чем при наличии локальных шин между различными устройствами ЭВМ. Однако простота реализации и возможность построения ОШ с высокой пропускной способностью обеспечили широкое использования такой структуры в персональных ЭВМ (ПК) и микропроцессорных системах (МПС). Тема1.3. Разновидности магистральных интерфейсов и примеры их использования в вычислительных, управляющих и измерительных системах. Магистральный параллельный интерфейс (МПИ) — стандарт, определяющий набор контактов и процедуры обмена по 16-разрядной шине с совмещением (мультиплексированием) адреса и данных. Стандарт не определяет физической реализации интерфейса. Принцип работы[править | править исходный текст] Связь между двумя устройствами, подключенными к интерфейсу, осуществляется по принципу «управляющий»—" управляемый" (активный—пассивный). В каждый момент времени только одно устройство является активным. Активное (управляющее) устройство управляет циклами обращения, при необходимости обслуживает прерывания и осуществляет арбитраж. Связь между устройствами является замкнутой и асинхронной. В ответ на обращение, пассивное устройство выставляет специальный сигнал, означающий что пассивное устройство присутствует и готово осуществлять дальнейший обмен. Если в течение 10 мкс ответ не получен, происходит прерывание специального вида. Таким образом, процесс обмена между устройствами не зависит от времени ответа (в пределах 10 мкс) или длины канала. Отсутствие или неисправность пассивного устройства может быть легко определена при отсутствии ответа. Разновидности Электроника 60 Системный канал МикроЭВМ (магистральный интерфейс) «Электроника 60» по ОСТ 11.305.903-80 является упрощённым вариантом интерфейса типа «Общая шина» (ГОСТ 26765.51-86), к которому подключаются устройства микроЭВМ — центральные процессоры, запоминающие устройства, периферийные устройства. Физически представляет собой унифицированную магистраль по 33÷ 42 линиям которой осуществляется передача информации комплекса. Использование единого унифицированного интерфейса, имеющий общий для всех устройств комплекса алгоритм связи, позволяет унифицировать всю аппаратуру сопряжения. По электрическим и функциональным характеристикам реализация МПИ в «Электроника-60» аналогична шине Q-Bus/LSI-Bus фирмы DEC. Механически незначительно отличается от Q-Bus: у Q-Bus расстояние между контактами 3.175 мм (что составляет 1/8 дюйма), а у МПИ — 3 мм. Также не совпадает нумерация контактов. Подобно Q-Bus, допускалось расширение адреса до 18 и 22 разрядов, что позволяло адресовать до 4 Мб памяти в максимальной конфигурации. Применялся разъем РППМ16х72. Из-за значительного содержания золота на контактах (около 4 грамм) практически все выпущенные изделия были утилизированы. ДВК Компьютеры ДВК строились на базе микропроцессоров серии К1801 которые в качестве системной шины использовали набор сигналов, очень близкий к МПИ, что значительно упрощало конструкцию. Для связи модулей в ДВК применялся интерфейс МПИ, механически и электрически совместимый с реализацией в Электроника 60, но с увеличенным по высоте между платами расстоянием. Таким образом устройства «Электроника-60» могли напрямую применяться в ДВК.
Объединительная панель («корзина») ДВК Популярное:
|
Последнее изменение этой страницы: 2016-03-17; Просмотров: 1658; Нарушение авторского права страницы


















 ТГ - тактовый генератор. СМ - системная магистраль. РГ - регистр.
ТГ - тактовый генератор. СМ - системная магистраль. РГ - регистр.