
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Число внешних кинематических пар, которыми группа Ассура присоединяется к не относящимся к ней звеньям механизма или стойке, называют порядком группы Ассура.
Все группы Ассура П класса являются группами второго порядка. Класс механизма определяется наивысшим классом Ассура, которая входит в его состав. Структурный анализ механизма Задачей структурного анализа механизма является - определение параметров структуры заданного механизма: числа звеньев, числа и вида кинематических пар, определение степени подвижности механизма, разбиение механизма на группы Ассура и начальный механизм, определение класса всего механизма.
Алгоритм проведения структурного анализа 1.Начертить структурную схему механизма. 2.Обозначит все подвижные и неподвижные звенья механизма. Начать обозначение с ведущего звена – кривошипа и далее по порядку. Показать направление вращения кривошипа. Найти количество подвижных звеньев п. 3.Заглавными буквами латинского алфавита обозначить все кинематические пары. Найти количество кинематических пар p1 и р2. 4.Определить степень подвижности механизма 5.Отсоединить от механизма наиболее отдаленную от ведущего звена группу Ассура II класса, так чтобы оставшийся механизм продолжал работать, а степень его подвижности W не менялась. Определить вид, порядок, класс и степень подвижности данной группы Ассура. Записать структурную формулу группы Ассура. 6.Продолжать отсоединять от механизма группы Ассура до тех пор, пока не останется начальный механизм. 7.Определить класс и степень подвижности начального механизма. Записать структурную формулу начального механизма. 8.Записать структурную формулу всего механизма. 9.Определить класс механизма. ПРИМЕР 2.1 Выполнить структурный анализ механизма. Структурная схема механизма.
2.Звенья механизма
Кинематические пары
Число одноподвижных кинематических пар p1=7, число двух подвижных кинематических пар р2=0. Степень подвижности механизма Строение групп Асcура а).Последняя группа Асcура б).Предпоследняя группа Асcура в).Начальный механизм Структурная формула всего механизм 7.Класс всего механизма II, так как наивысший класс группы Ассура, входящей в данный механизм II. ЛЕКЦИЯ 3 Краткое содержание Определение скоростей и ускорений точек звеньев при поступательном, вращательном и плоскопараллельном движениях. Планы скоростей и ускорений. Принцип подобия в планах скоростейи ускорений. Примеры кинематического исследования механизмов. Теоретические предпосылки определения скоростей и ускорений Основные формулы для определения скоростей и ускорений точек звеньев механизмов приведены в таблице 3.1.
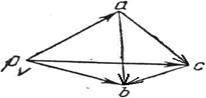
Планы скоростей и ускорений Планом скоростей (ускорений) называется диаграмма, на которой от некоторого центра (полюса) в масштабе отложены векторы скоростей (ускорений) точек тела. Рассмотрим тело, совершающее плоскопараллельное движение (рис.3.1). Для плоскопараллельного движения скорости точек определяются по формулам:
где
Необходимо найти относительные скорости План скоростей получим, если в выбранном масштабе
В результате построения плана скоростей получен треугольник авс (рис.3.2), который подобен треугольнику АВС. Найдем относительные скорости
Рис.3.1 Рис.3.2
Сформулируем принцип подобия в плане скоростей: В плане скоростей векторы относительных скоростей точек жесткого звена образуют фигуру, подобную звену, повернутую на угол 90° в сторону угловой скорости звена. Следствие. Пользуясь принципом подобия, достаточно на плане скоростей построить векторы скоростей только двух точек жесткого звена. Скорость же любой третьей точки определится путем построения фигуры или линии подобной данному звену. Аналогично формулируется принцип подобия в плане ускорений. Основные формулы для определения скоростей и ускорений точек звеньев Таблица 3.1
Пример 3.1 Популярное:
|
Последнее изменение этой страницы: 2016-03-17; Просмотров: 1116; Нарушение авторского права страницы
 .
.
 , ,
, ,  (3.1)
(3.1) ,
,  ,
,  - абсолютные скорости точек А, В, С;
- абсолютные скорости точек А, В, С;  ,
,  - относительные скорости.
- относительные скорости. (
(  ) отложим от полюса
) отложим от полюса  отрезки
отрезки  ,
,  и
и  , параллельные векторам скоростей
, параллельные векторам скоростей  ,
,  ,
,  ,
,  .
.
 ,
,  .
.
 , вектор который направлен вдоль траектории движения точки A.
, вектор который направлен вдоль траектории движения точки A.
 IIХ-Х
IIХ-Х
 . Если вектор ускорения
. Если вектор ускорения  направлен в сторону
направлен в сторону  , то движение равноускоренное, если вектор ускорения
, то движение равноускоренное, если вектор ускорения  направлен в противоположнyю сторону
направлен в противоположнyю сторону  , то движение равнозамедленное.
, то движение равнозамедленное.
 II Х -Х
II Х -Х

 Вектор
Вектор  .
.

 Нормальное ускорение
Нормальное ускорение  =
=  Вектор
Вектор  направлен по радиусу АО к центру вращения О.
направлен по радиусу АО к центру вращения О.
 II OA.
Касательное ускорение
II OA.
Касательное ускорение  Вектор
Вектор  направлен перпендикулярно АО в сторону углового ускорения
направлен перпендикулярно АО в сторону углового ускорения 


 Относительная скорость
Относительная скорость
 Вектор
Вектор  направлен перпендикулярно к ВА в сторону угловой скорости
направлен перпендикулярно к ВА в сторону угловой скорости  .
.

 Относительное ускорение
Относительное ускорение
 Нормальное ускорение
Нормальное ускорение
 =
=  Вектор
Вектор  направлен параллельно АВ (от точки В к точке А)
направлен параллельно АВ (от точки В к точке А)
 II ВА
Касательное ускорение
II ВА
Касательное ускорение
 Вектор
Вектор  направлен перпендикулярно АВ
направлен перпендикулярно АВ

 ВА
ВА