
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Теория механизмов и машин - это наука, изучающая структуру, кинематику и динамику механизмов и машин в связи с их анализом и синтезом.Стр 1 из 10Следующая ⇒
ЛЕКЦИЯ 1 Краткое содержание Введение. Цель и задачи курса ТММ. Краткая историческая справка. Основные определения курса ТММ. Машина. Классификация машин. Механизм. Классификация механизмов. Машинный агрегат. Элементы механизма: звено, кинематическая пара, кинематическая цепь. Их классификация. Цель и задачи курса Теория механизмов и машин - это наука, изучающая структуру, кинематику и динамику механизмов и машин в связи с их анализом и синтезом. К основным задачам теории механизмов и машин относятся: · изучение строения (структуры) механизма; · определение положений механизмов и траекторий, описываемых отдельными точками; · определение скоростей и ускорений отдельных точек и звеньев механизма; · исследование и проектирование различных механизмов: рычажных, зубчатых, кулачковых; · определение сил, действующих на звенья механизма (внешних, реакций, трения, инерции); · изучение способов уравновешивания сил инерции в машинах, балансировка роторов; · изучение энергетического баланса машин (к.п.д. и др.); · изучение истинного закона движения машин под действием заданных сил и способов регулирования скорости машины. Краткая историческая справка Как самостоятельная научная дисциплина ТММ, подобно другим прикладным разделам науки, возникла в результате промышленной революции, начало которой относится к 30-м годам XVIII века. Однако машины существовали задолго до этой даты. Поэтому в истории развития ТММ можно условно выделить четыре периода. 1-й период до начала XIX века - период эмпирического машиностроения, в течении которого изобретается большое количество простых машин и механизмов: подъемники, мельницы, камнедробилки, ткацкие и токарные станки, паровые машины (Леонардо да Винчи, Вейст, Ползунов, Уатт). Одновременно закладываются и основы теории: теорема об изменении кинетической энергии и механической работы, " золотое правило механики", законы трения, понятие о передаточном отношении, основы геометрической теории циклоидального и эвольвентного зацепления (Карно, Кулон, Амонтон, Кадано, Ремер, Эйлер). 2-й период от начала до середины XIX века - период начала развития ТММ. В это время разрабатываются такие разделы как кинематическая геометрия механизмов (Савари, Шаль, Оливье), кинетостатика (Кариолис), расчет маховика (Понселе), классификация механизмов по функции преобразования движения (Монж, Лану) и другие разделы. Пишутся первые научные монографии по механике машин (Виллис, Бориньи), читаются первые курсы лекций по ТММ и издаются первые учебники (Бетанкур, Чижов, Вейсбах). 3-й период от второй половины XIX века до начала XX века - период фундаментального развития ТММ. За этот период разработаны: основы структурной теории (Чебышев, Грюблер, Сомов, Малышев), основы теории регулирования машин (Вышнеградский), основы теории гидродинамической смазки (Грюблер), основы аналитической теории зацепления (Оливье, Гохман), основы графоаналитической динамики (Виттенбауэр, Мерцалов), структурная классификация и структурный анализ (Ассур), метод планов скоростей и ускорений (Мор, Манке), правило проворачиваемости механизма (Грасгоф) и многие другие разделы ТММ. 4-й период от начала XX века до настоящего времени - период интенсивного развития всех направлений ТММ как в России, так и за рубежом. Среди русских ученых необходимо отметить обобщающие работы Артоболевского И.И., Левитского Н.И., Фролова К.В.; в области структуры механизмов - работы Малышева А.И., Решетова Л.П., Озола О.Г.; по кинематике механизмов - работы Колчина Н.И., Смирнова Л.П., Зиновьева В.А.; по геометрии зубчатых передач - работы Литвина Ф.Л., Кетова Х.Ф., Гавриленко В.А., Новикова М.Л.; по динамике машин и механизмов - Горячкина В.П., Кожевникова С.П., Коловского М.З. и др. Данное перечисление не охватывает и малой доли работ выдающихся ученых, внесших существенный вклад в развитие ТММ в этот период. Из зарубежных ученых необходимо отметить работы Альта X., Бегельзака Г., Бейера Р., Крауса Р., Кросли Ф. и многих других. Основные определения курса ТММ Машина По мере развития машин содержание термина " машина" изменялось. Для современных машин дадим следующее определение: Машина есть устройство, создаваемое человеком для преобразования энергии, материалов и информации с целью облегчения физического и умственного труда, увеличения его производительности и частичной или полной замены человека в его трудовых и физиологических функциях. Классификация машин 1.Энергетические машины (электродвигатели, ДВС, компрессоры и т.д.); 2.Транспортные машины (краны, конвейеры, автомобили и т.д.); 3.Технологические машины (металлорежущие станки, полиграфические, горнодобывающие, швейные машины и др.); 4.ЭВМ. Механизм Существует несколько определений. Дадим одно из них. Механизм есть система тел, предназначенная для преобразования движения одного или нескольких твердых тел в требуемые движения других тел. Все механизмы можно разделить на плоские и пространственные. У плоского механизма точки его звеньев описывают траектории, лежащие в параллельных плоскостях. У пространственного механизма точки его звеньев описывают неплоские траектории или траектории, лежащие в пересекающихся плоскостях. Звено Кинематическая пара Кинематическая пара - это соединение двух звеньев, обеспечивающее перемещение одного звена относительно другого. Кинематические пары передают нагрузку и движение и часто определяют работоспособность и надежность механизма и машины в целом. Поэтому правильный выбор вида пары, ее формы и размеров, а также конструкционных материалов и условий смазывания имеет большое значение при проектировании и эксплуатации машин. Кинематические пары классифицируются по следующим признакам:
а). По числу степеней подвижности Н Возможные независимые движения одного звена относительно другого называются степенями подвижности кинематической пары H. Ограничения, накладываемые на относительные движения звеньев, называются условиями связи в кинематических парах. Число степеней подвижности кинематической пары определяется зависимостью H=6-S (1.1) где 6-максимальное число степеней свободы твердого тела в пространстве (3 поступательных и 3 вращательных движения относительно осей координат XYZ); S-число условий связи, наложенных кинематической парой на относительное движение каждого звена. Кинематические пары делятся на: одноподвижные (поступательные, вращательные, винтовые), двухподвижные, (кулачек-толкатель, зуб-зуб), трехподвижные, (сферические), четырёхподвижные, (цилиндр-плоскость), пятиподвижные (шар-плоскость). Примеры приведены в таблице1.1.
б). По характеру соприкосновения звеньев кинематические пары делятся на низшие и высшие Низшими кинематическими парами называются такие, в которых соприкосновение звеньев происходит по поверхности. Например, одноподвижные поступательная и вращательная кинематические пары, Кинематическая цепь - это система звеньев, соединённых с помощью кинематических пар. ЛЕКЦИЯ 2 Краткое содержание Структурная схема механизма. Кинематическая схема механизма. Определения степени подвижности механизма. Структурный принцип образования механизмов. Начальный механизм. Группы Ассура. Структурный анализ механизма. Примеры.
Структурная схема механизма – это безмасштабное графическое изображение механизма с применением условных обозначений звеньев и кинематических пар. Кинематическая схема механизма – это структурная схема, выполненная в масштабе. Степень подвижности механизма
Виды групп Ассура II класса Рассмотрим кинематические цепи, в состав которых входят только одноподвижные кинематические пары Для группы Ассура
Так как количество кинематических пар должно быть целыми, то количество звеньев группы Ассура может быть только чётными числом. Следовательно, равенству (2.1) может удовлетворить следующий ряд чисел: n (количество подвижных звеньев ) 2 4 6 p1 (число одноподвижных пар ) 3 6 9 Класс группы Ассура II III IV и т.д.
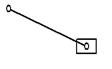
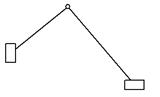
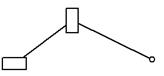
В группу Ассура II класса может входить: 2 подвижных звена и 3 кинематические пары, которые необходимы для присоединения звеньев к стойке или к другим звеньям. Если обозначить вращательную кинематическую пару В, а поступательную П, то возможны следующие виды групп Ассура II класса: 1.ВВВ (рис.2.2); 2. ВВП (рис.2.3); 3.ВПВ (рис.2.4); 4.ППВ (рис.2.5); 5.ПВП (рис. 2.6).
Рис.2.2 Рис.2.3 Рис.2.4
Рис.2.5 Рис.2.6. Казалось бы, что, следуя по пути замены вращательных пар поступательными, можно было бы заменить все три вращательные пары поступательными (ППП). Но в этом случае при присоединении к стойке эта группа Ассура будет переходить в плоский механизм с одними поступательными парами - клиновой механизм (рис.1.7). В группах Ассура различают внутренние и внешние кинематические пары. ПРИМЕР 2.1 Выполнить структурный анализ механизма. Кинематические пары
Число одноподвижных кинематических пар p1=7, число двух подвижных кинематических пар р2=0. Строение групп Асcура а).Последняя группа Асcура б).Предпоследняя группа Асcура в).Начальный механизм ЛЕКЦИЯ 3 Краткое содержание Определение скоростей и ускорений точек звеньев при поступательном, вращательном и плоскопараллельном движениях. Планы скоростей и ускорений. Принцип подобия в планах скоростейи ускорений. Примеры кинематического исследования механизмов. Теоретические предпосылки определения скоростей и ускорений Основные формулы для определения скоростей и ускорений точек звеньев механизмов приведены в таблице 3.1.
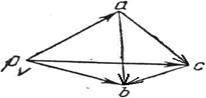
Планы скоростей и ускорений Планом скоростей (ускорений) называется диаграмма, на которой от некоторого центра (полюса) в масштабе отложены векторы скоростей (ускорений) точек тела. Рассмотрим тело, совершающее плоскопараллельное движение (рис.3.1). Для плоскопараллельного движения скорости точек определяются по формулам:
где
Необходимо найти относительные скорости План скоростей получим, если в выбранном масштабе
В результате построения плана скоростей получен треугольник авс (рис.3.2), который подобен треугольнику АВС. Найдем относительные скорости
Рис.3.1 Рис.3.2
Сформулируем принцип подобия в плане скоростей: В плане скоростей векторы относительных скоростей точек жесткого звена образуют фигуру, подобную звену, повернутую на угол 90° в сторону угловой скорости звена. Следствие. Пользуясь принципом подобия, достаточно на плане скоростей построить векторы скоростей только двух точек жесткого звена. Скорость же любой третьей точки определится путем построения фигуры или линии подобной данному звену. Аналогично формулируется принцип подобия в плане ускорений. Основные формулы для определения скоростей и ускорений точек звеньев Таблица 3.1
Пример 3.1 Пример 3.2 ЛЕКЦИЯ 4 Краткое содержание Силовой анализ механизмов. Основные задачи. Силы, действующие на звенья механизма. Реакции в кинематических парах. Принципы и последовательность силового расчёта. Типовые расчёты групп Ассура. Задачи силового анализа Основными задачами силового анализа являются: 1.Определение реакций в кинематических парах. Знание этих реакций позволяет путём проведения расчетов на прочность и жесткость выбрать оптимальные размеры и форму звеньев механизма. 2.Определениеуравновешивающих сил Пример 4.1 Дано: Масса звена:
1.Определение силы тяжести звена:
2.Определение силы инерции: Сила инерции направлена в противоположную сторону ускорению
Построим начальный механизм в масштабе 1: 1.
Покажем все действующие на него силы Здесь
Начальный механизм План сил для начального механизма (масштаб1: 1) 1.Найдем величину уравновешивающей силы Fур. Запишем уравнение моментов всех сил относительно точки О.
Уравновешивающая сила Fур равна: . Длины плеч h1 и h2 измерены на расчетной схеме. 2.Найдем реакцию R41. Составим векторное уравнение равновесия всех сил, действующих на начальный механизм.
Выберем масштаб плана сил mF=0, 05 Вычислим величины отрезков, соответствующих векторам сил. Данные занесем в таблицу 2: Таблица 2
Строим план сил. В соответствии с векторным уравнением откладываем отрезки, соответствующие векторам ЛЕКЦИЯ 5 Краткое содержание Зубчатые механизмы. Классификация зубчатых механизмов. Геометрические характеристики эвольвентного зубчатого колеса. Методы изготовления эвольвентных зубчатых колёс. Исходный и рабочий контуры режущего инструмента. Смещение исходного контура. Зубчатые механизмы По характеру движения осей · обычные передачи - имеют неподвижные геометрические оси всех колёс; · планетарные передачи - оси одного или нескольких колёс подвижны. По направлению зубьев · прямозубые (рис. 5.1, а, б); · косозубые (рис. 5.1, д). По профилю зубьев · с эвольвентным зацеплением - профили зубьев очерчены по эвольвенте; · с циклоидным зацеплением - профили зубьев очерчены по дугам эпи- и гипоциклоид; · с зацеплением Новикова - профили зубьев очерчены по окружностям.
а). б). в). г). д).
Рис.5.1 ЛЕКЦИЯ 6 Краткое содержание . Многоступенчатые зубчатые механизмы. Кинематика коробки передач. Дифференциальные зубчатые механизмы. Метод обращённого движения. Кинематика автомобильного дифференциала. Планетарные зубчатые механизмы. Примеры. Кинематика коробки передач Коробкой передач - это зубчатый механизм, передаточное отношение которого можно изменить скачкообразно. Коробками передач снабжают все машины, рабочие органы которых должны вращаться с различными скоростями в зависимости от условий работы. В автомобиле коробка передач служит для изменения крутящего момента. передаваемого от коленчатого вала двигателя к карданному валу, для движения автомобиля задним ходом и длительного разобщения двигателя от трансмиссии во время стоянки автомобиля и при движении его по инерции. Во время трогания автомобиля с места, при движении на подъем с грузом крутящий момент на колесах должен быть большим, чем при движении по горизонтальному участку дороги.
Дано: z1=20, z2=52, z3=48, z4=32, z5=22, z6=26, z7=17, z8=42, z9=30, z10=24. Число оборотов ведущего вала 1 n1=1000 об/мин. Решение: Данная коробка передач имеет 4 передачи для движения вперед и одну передачу заднего хода. В постоянном зацеплении находятся шестерня ведущего и промежуточного валов, шестерни 2 и 3 передач промежуточного и ведомого валов. Первая передача (рис.6.4, а) включается перемещением шестерни первой передачи ведомого вала назад до зацепления с шестерней первой передачи промежуточного вала. Вторая передача (рис.6.4, б) включается перемещением шестерни первой передачи ведомого вала вперед до зацепления с шестерней постоянного зацепления второй передачи промежуточного вала. Третья передача (рис.6.4, в) включается перемещением муфты синхронизатора назад. Зубья муфты входят в зацепление с венцом шестерни постоянного зацепления третьей передачи, закрепляя ее на ведомом валу. Четвертая передача (рис.6.4, г) включается перемещением муфты синхронизатора вперед, ее зубья входят в зацепление с венцом ведущего вала, Рис.6.3 соединяя ведущий и ведомый валы. Промежуточный вал в передаче крутящего момента не участвует. Задний ход (рис.6.4, г) включается перемещением блока шестерен заднего хода на оси до ввода в зацепление с шестернями первой передачи промежуточного и ведомого валов.

Рис.6.4
Для каждой из передач определяем передаточное отношение i1-2 по формуле (6.1), число оборотов ведомого вала n2 = n1/i1-2 и крутящий момент. Результаты расчётов приведены в таблице.
Дифференциальные механизмы Дифференциальные механизмы имеют зубчатые колёса с подвижными осями (рис.6.5).
W= 3n-2p1-p2= здесь n=3 – число подвижных звеньев (колёса 1 и 2 водило H), p1=3 – число одноподвижных кинематических пар (стойка – колесо 1, стойка - водило H и водило H – колесо 2, p2=1 - число двухподвижных кинематических пар (зубья колёс 1 и 2). В данном механизме два независимых закона движения, т.е. двум звеньям можно задать произвольные законы движения, тогда звено 2 будет двигаться по определённому закону.
Рис.6.5
Метод обращённого движения Дифференциальные механизмы не имеют постоянного передаточного отношения. Передаточное отношение можно определить, используя метод обращённого движения (метод Виллиса). Для этого дифференциальному механизму придаём дополнительную угловую скорость, равную угловой скорости водила
Такой дифференциальный механизм называется преобразованным, для которого справедливо отношение: Если в дифференциальном механизме имеется n зубчатых колёс: Пример 6.5 Определить передаточное отношение планетарного механизма (рис.6.9) от вала двигателя 1 к валу винта самолёта H и число оборотов винта
Передаточное отношение планетарного механизма:
Число оборотов винта:
Рис.6.9
ЛЕКЦИЯ 1 Краткое содержание Введение. Цель и задачи курса ТММ. Краткая историческая справка. Основные определения курса ТММ. Машина. Классификация машин. Механизм. Классификация механизмов. Машинный агрегат. Элементы механизма: звено, кинематическая пара, кинематическая цепь. Их классификация. Цель и задачи курса Теория механизмов и машин - это наука, изучающая структуру, кинематику и динамику механизмов и машин в связи с их анализом и синтезом. К основным задачам теории механизмов и машин относятся: · изучение строения (структуры) механизма; · определение положений механизмов и траекторий, описываемых отдельными точками; · определение скоростей и ускорений отдельных точек и звеньев механизма; · исследование и проектирование различных механизмов: рычажных, зубчатых, кулачковых; · определение сил, действующих на звенья механизма (внешних, реакций, трения, инерции); · изучение способов уравновешивания сил инерции в машинах, балансировка роторов; · изучение энергетического баланса машин (к.п.д. и др.); · изучение истинного закона движения машин под действием заданных сил и способов регулирования скорости машины. Краткая историческая справка Как самостоятельная научная дисциплина ТММ, подобно другим прикладным разделам науки, возникла в результате промышленной революции, начало которой относится к 30-м годам XVIII века. Однако машины существовали задолго до этой даты. Поэтому в истории развития ТММ можно условно выделить четыре периода. 1-й период до начала XIX века - период эмпирического машиностроения, в течении которого изобретается большое количество простых машин и механизмов: подъемники, мельницы, камнедробилки, ткацкие и токарные станки, паровые машины (Леонардо да Винчи, Вейст, Ползунов, Уатт). Одновременно закладываются и основы теории: теорема об изменении кинетической энергии и механической работы, " золотое правило механики", законы трения, понятие о передаточном отношении, основы геометрической теории циклоидального и эвольвентного зацепления (Карно, Кулон, Амонтон, Кадано, Ремер, Эйлер). 2-й период от начала до середины XIX века - период начала развития ТММ. В это время разрабатываются такие разделы как кинематическая геометрия механизмов (Савари, Шаль, Оливье), кинетостатика (Кариолис), расчет маховика (Понселе), классификация механизмов по функции преобразования движения (Монж, Лану) и другие разделы. Пишутся первые научные монографии по механике машин (Виллис, Бориньи), читаются первые курсы лекций по ТММ и издаются первые учебники (Бетанкур, Чижов, Вейсбах). 3-й период от второй половины XIX века до начала XX века - период фундаментального развития ТММ. За этот период разработаны: основы структурной теории (Чебышев, Грюблер, Сомов, Малышев), основы теории регулирования машин (Вышнеградский), основы теории гидродинамической смазки (Грюблер), основы аналитической теории зацепления (Оливье, Гохман), основы графоаналитической динамики (Виттенбауэр, Мерцалов), структурная классификация и структурный анализ (Ассур), метод планов скоростей и ускорений (Мор, Манке), правило проворачиваемости механизма (Грасгоф) и многие другие разделы ТММ. 4-й период от начала XX века до настоящего времени - период интенсивного развития всех направлений ТММ как в России, так и за рубежом. Среди русских ученых необходимо отметить обобщающие работы Артоболевского И.И., Левитского Н.И., Фролова К.В.; в области структуры механизмов - работы Малышева А.И., Решетова Л.П., Озола О.Г.; по кинематике механизмов - работы Колчина Н.И., Смирнова Л.П., Зиновьева В.А.; по геометрии зубчатых передач - работы Литвина Ф.Л., Кетова Х.Ф., Гавриленко В.А., Новикова М.Л.; по динамике машин и механизмов - Горячкина В.П., Кожевникова С.П., Коловского М.З. и др. Данное перечисление не охватывает и малой доли работ выдающихся ученых, внесших существенный вклад в развитие ТММ в этот период. Из зарубежных ученых необходимо отметить работы Альта X., Бегельзака Г., Бейера Р., Крауса Р., Кросли Ф. и многих других. Основные определения курса ТММ Машина По мере развития машин содержание термина " машина" изменялось. Для современных машин дадим следующее определение: Машина есть устройство, создаваемое человеком для преобразования энергии, материалов и информации с целью облегчения физического и умственного труда, увеличения его производительности и частичной или полной замены человека в его трудовых и физиологических функциях. Классификация машин 1.Энергетические машины (электродвигатели, ДВС, компрессоры и т.д.); 2.Транспортные машины (краны, конвейеры, автомобили и т.д.); 3.Технологические машины (металлорежущие станки, полиграфические, горнодобывающие, швейные машины и др.); 4.ЭВМ. Механизм Существует несколько определений. Дадим одно из них. Механизм есть система тел, предназначенная для преобразования движения одного или нескольких твердых тел в требуемые движения других тел. Все механизмы можно разделить на плоские и пространственные. У плоского механизма точки его звеньев описывают траектории, лежащие в параллельных плоскостях. Популярное:
|
Последнее изменение этой страницы: 2016-03-17; Просмотров: 1118; Нарушение авторского права страницы
 .
. или
или  (2.3)
(2.3)

 , ,
, ,  (3.1)
(3.1) ,
,  ,
,  - абсолютные скорости точек А, В, С;
- абсолютные скорости точек А, В, С;  ,
,  - относительные скорости.
- относительные скорости. (
(  ) отложим от полюса
) отложим от полюса  отрезки
отрезки  ,
,  и
и  , параллельные векторам скоростей
, параллельные векторам скоростей  ,
,  ,
,  ,
,  .
.
 ,
,  .
.
 , вектор который направлен вдоль траектории движения точки A.
, вектор который направлен вдоль траектории движения точки A.
 IIХ-Х
IIХ-Х
 . Если вектор ускорения
. Если вектор ускорения  направлен в сторону
направлен в сторону  , то движение равноускоренное, если вектор ускорения
, то движение равноускоренное, если вектор ускорения  направлен в противоположнyю сторону
направлен в противоположнyю сторону  , то движение равнозамедленное.
, то движение равнозамедленное.
 II Х -Х
II Х -Х

 Вектор
Вектор  .
.

 Нормальное ускорение
Нормальное ускорение  =
=  Вектор
Вектор  направлен по радиусу АО к центру вращения О.
направлен по радиусу АО к центру вращения О.
 II OA.
Касательное ускорение
II OA.
Касательное ускорение  Вектор
Вектор  направлен перпендикулярно АО в сторону углового ускорения
направлен перпендикулярно АО в сторону углового ускорения 


 Относительная скорость
Относительная скорость
 Вектор
Вектор  направлен перпендикулярно к ВА в сторону угловой скорости
направлен перпендикулярно к ВА в сторону угловой скорости  .
.

 Относительное ускорение
Относительное ускорение
 Нормальное ускорение
Нормальное ускорение
 =
=  Вектор
Вектор  направлен параллельно АВ (от точки В к точке А)
направлен параллельно АВ (от точки В к точке А)
 II ВА
Касательное ускорение
II ВА
Касательное ускорение
 Вектор
Вектор  направлен перпендикулярно АВ
направлен перпендикулярно АВ

 ВА
ВА
 или моментов сил
или моментов сил  , которые нужно приложить к ведущим звеньям для удержания механизма в заданном положении либо для обеспечения требуемого движения ведущих звеньев. При этом считаются известными массы всех звеньев, все внешние силы и моменты, действующие на звенья, а также законы движения звеньев.
, которые нужно приложить к ведущим звеньям для удержания механизма в заданном положении либо для обеспечения требуемого движения ведущих звеньев. При этом считаются известными массы всех звеньев, все внешние силы и моменты, действующие на звенья, а также законы движения звеньев. . Ускорения центра масс звена:
. Ускорения центра масс звена:  м/с2.
м/с2. =
=  н.
н.  =
=  н.
н.  .
. ,
,  ,
,  , неизвестную реакцию
, неизвестную реакцию  и уравновешивающую силу Fур, которую приложим перпендикулярно кривошипу АО в точке А.
и уравновешивающую силу Fур, которую приложим перпендикулярно кривошипу АО в точке А. . (По величине реакции равны, по направлению противоположны).
. (По величине реакции равны, по направлению противоположны). 0, 05
0, 05 


 .
.



 . Векторы можно откладывать в любом порядке. Соединяя начало первого вектора и конец последнего, получим многоугольник сил и отрезок, определяющий реакцию
. Векторы можно откладывать в любом порядке. Соединяя начало первого вектора и конец последнего, получим многоугольник сил и отрезок, определяющий реакцию 




 Пример 6.3 . Определить скорости ведомого вала в коробке передач (рис.6.3). Коробка передач состоит из картера, ведущего вала с шестерней, ведомого вала, промежуточного вала, оси шестерни заднего хода, набора шестерен и механизма переключения.
Пример 6.3 . Определить скорости ведомого вала в коробке передач (рис.6.3). Коробка передач состоит из картера, ведущего вала с шестерней, ведомого вала, промежуточного вала, оси шестерни заднего хода, набора шестерен и механизма переключения.
 Зубчатое колесо 1 называется центральным колесом, колесо 2, имеющее подвижную ось, – сателлитом, а звено H, несущее сателлит, – водилом. Число степеней подвижности механизма находим по формуле Чебышева
Зубчатое колесо 1 называется центральным колесом, колесо 2, имеющее подвижную ось, – сателлитом, а звено H, несущее сателлит, – водилом. Число степеней подвижности механизма находим по формуле Чебышева ,
,  , но направленную противоположно. Это не изменяет относительного движения звеньев, абсолютные же скорости будут другими.
, но направленную противоположно. Это не изменяет относительного движения звеньев, абсолютные же скорости будут другими.



 (6.2)
(6.2) =
=  (6.3)
(6.3) , если число оборотов двигателя n1=3000 об./мин., а количество зубьев зубчатых колёс равно: z1=66, z2=18, z3=30.
, если число оборотов двигателя n1=3000 об./мин., а количество зубьев зубчатых колёс равно: z1=66, z2=18, z3=30.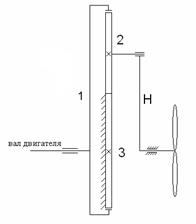 Решение:
Решение: