|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Кинематическая цепь - это система звеньев, соединённых с помощью кинематических пар.
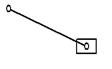
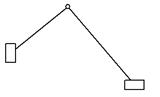
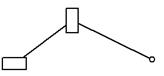
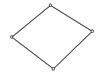
Классификация кинематических цепей Незамкнутые - это такие кинематические цепи, которые имеют звенья, входящие только в одну кинематическую пару (рис.1.10). Замкнутые - это кинематические цепи, в которых каждое звено входит не менее, чем в две кинематические пары (рис.1.11 ). Простые - это кинематические цепи, в которых каждое звено входит не более, чем в две кинематические пары (рис.1.10, 1.11). Сложные - это кинематические цепи, в которых имеется хотя бы одно звено, входящее более чем в две кинематические пары (рис.1.12). Большинство используемых механизмов образованы замкнутыми кинематическими цепями.
Рис.1.10 Рис.1.11 Рис.1.12 ЛЕКЦИЯ 2 Краткое содержание Структурная схема механизма. Кинематическая схема механизма. Определения степени подвижности механизма. Структурный принцип образования механизмов. Начальный механизм. Группы Ассура. Структурный анализ механизма. Примеры.
Структурная схема механизма – это безмасштабное графическое изображение механизма с применением условных обозначений звеньев и кинематических пар. Кинематическая схема механизма – это структурная схема, выполненная в масштабе. Степень подвижности механизма
Степень подвижности механизма W - это количество независимых движений, которые нужно подвести к механизму, чтобы на выходе получить одно или наоборот. Для плоских механизмов применяется формула Чебышева: W =3n - 2p1 - p2, (2.1)
где n – число подвижных звеньев механизма; p1 - число одноподвижных кинематических пар; p2 - число двухподвижных кинематических пар.
В пространственных механизмах степень подвижности определяется по формуле Сомова-Малышева: W =6n - 5p1 - 4p2 - 3p3 - 2p4 - p5, (2.2)
где р3 - число трёхподвижных кинематических пар; р4 - число четырёхподвижных кинематических пар; р5 - число пятиподвижных кинематических пар. Большинство механизмов имеют степень подвижности W=1. Их называют рациональными. Эти механизмы не чувствительны к погрешностям монтажа, изготовления и деформирования. Такие механизмы не требуют приработки. У дифференциальных зубчатых механизмов W=2, у роботов и манипуляторов W=4-8, у основного механизма экскаватора W=4. Если W=0, то получим неподвижную конструкцию – ферму.
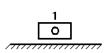
Структурный принцип образования механизмов. Группы Ассура Основной принцип образования механизмов был впервые сформулирован в 1916 году русским учёным Леонидом Владимировичем Ассуром - профессором Петербургского политехнического института. Согласно идее Л.В.Ассура любой механизм образуется последовательным присоединением к ведущему звену и стойке кинематических цепей, удовлетворяющих условию, что степень их подвижности W=0. Ведущее звено, входящее в одноподвижную кинематическую пару со стойкой, образует начальный механизм. (рис.2.1 а, б). Ведущим звеном может быть как кривошип, так и ползун. Начальному механизму присваивается 1 класс. Степень подвижности начального механизма W =1.
а). б). Рис.2.1 Кинематические цепи, у которых степень подвижности W=0, называются группами Ассура.
Начальный Группа Ассура Группа Ассура Механизм механизм II класс II класс 1 класс W =0 W =0 W =1 W =1 Используя приведенные определения, можно сказать, что любой механизм образуется присоединением к начальному механизму групп Ассура. Виды групп Ассура II класса Рассмотрим кинематические цепи, в состав которых входят только одноподвижные кинематические пары Для группы Ассура
Так как количество кинематических пар должно быть целыми, то количество звеньев группы Ассура может быть только чётными числом. Следовательно, равенству (2.1) может удовлетворить следующий ряд чисел: n (количество подвижных звеньев ) 2 4 6 p1 (число одноподвижных пар ) 3 6 9 Класс группы Ассура II III IV и т.д.
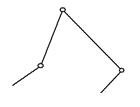
В группу Ассура II класса может входить: 2 подвижных звена и 3 кинематические пары, которые необходимы для присоединения звеньев к стойке или к другим звеньям. Если обозначить вращательную кинематическую пару В, а поступательную П, то возможны следующие виды групп Ассура II класса: 1.ВВВ (рис.2.2); 2. ВВП (рис.2.3); 3.ВПВ (рис.2.4); 4.ППВ (рис.2.5); 5.ПВП (рис. 2.6).
Рис.2.2 Рис.2.3 Рис.2.4
Рис.2.5 Рис.2.6. Казалось бы, что, следуя по пути замены вращательных пар поступательными, можно было бы заменить все три вращательные пары поступательными (ППП). Но в этом случае при присоединении к стойке эта группа Ассура будет переходить в плоский механизм с одними поступательными парами - клиновой механизм (рис.1.7). В группах Ассура различают внутренние и внешние кинематические пары. Популярное:
|
Последнее изменение этой страницы: 2016-03-17; Просмотров: 1197; Нарушение авторского права страницы







 .
. или
или  (2.3)
(2.3)