|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Занятие 18 «Структурная схема, назначение элементов САВПЭ»⇐ ПредыдущаяСтр 21 из 21
Универсальная система автоведения грузовых поездов Универсальная система автоведения грузовых поездов (рис. 1) обеспечивает расчет энергооптимальной траектории с учетом меняющейся поездной обстановки. Осуществляет контроль допустимых продольных сил в составе и управляет тягой, торможением локомотива. Все перечисленные функции направлены на облегчение труда локомотивной бригады и безопасность движения поездов.
Рисунок1. Состав УСАВП-Г
Логический принцип программы УСАВПГ приведён на рис. 2. В базу данных системы входят: заданный маршрут, профиль пути, ограничения скорости, путевые объекты, расписание движения, состав поезда (непосредственно в базу данных вводятся все типы вагонов конкретного поезда).
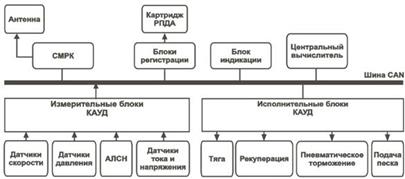
Рисунок 2. Логический принцип программы УСАВПГ База данных является также и настройкой параметров автоведения поезда с учётом параметров: настройка уставок тока, настройка параметров пневматического торможения, определение параметров подачи песка. Регистратор параметров движения электровоза с высокой точностью измеряет расход энергии. Фиксирует текущее состояние электровоза Интеллектуальная система автоматизированного вождения соединительных поездов с тягой, распределение по длине состава Интеллектуальная система автоматизированного вождения соединительных поездов с тягой, распределение по длине состава (рис. 3, табл. 1) обеспечивает управление локомотивами соединительного поезда в режиме автоведения, создаёт энергооптимальную траекторию движения поезда. Управляет и ограничивает продольные силы в составе на допустимом уровне, то есть не более 60 тс. Управляет уровнем сцепления путём контроля буксования и регулирования подачи песка. Облегчает труд локомотивной бригады при распределенной силе тяги несколькими локомотивами.
Рисунок 3. Состав электронных блоков системы ИСАВП-РТ Таблица 1 Технические характеристики системы ИСАВП-РТ
Особенностью ИСАВП-РТ является возможность ведения состава
Рисунок 4. Структура построения системы ИСАВП-РТ
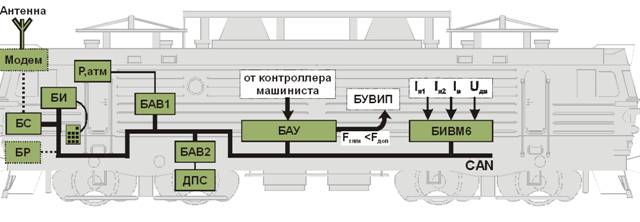
Облегчение труда машиниста обеспечивается за счёт: правильного автоматического подбора управления системой, уменьшения числа рутинных операций по управлению локомотивом, повышения информативности машиниста в условиях ограниченной видимости (снег, дождь, туман, ночь).
Рисунок 5. Распределение блоков на грузовом электровозе
Основными эфектообразующими показателями ИСАВП-РТ являются: повышение пропускной способности участков на 4–6 %, увеличение производительности труда локомотивных бригад за счёт управления По результатам опытных данных (рис. 6) поездок в 2008 году экономия электроэнергии на тягу составляет до 13 %.
Рисунок 6. Опытные данные по продольным динамическим силам в сечении: № 1, 13, 31 автосцепных устройств сдвоенного поезда весом 11 907 т, 564 оси Клавиатура и меню После включения системы и ее загрузки появится Основной экран системы, который даёт исчерпывающую информацию о текущем состоянии автоведения. Цифры для ввода значений или выбора пункта. Для быстрого перехода нажать * и цифру. Стрелки – для перемещения по экрану: вверх – вниз, влево – вправо. # – удалить символ или строку. Информация в системе автоведения разделена по пунктам (меню). Чтобы открыть пункт, необходимо поставить курсор к нужной строке. Для редактирования необходимо открывать один пункт за другим. Клавиша «М» – запомнить, клавиша «F» – отменить (рис. 7).
Рисунок 7. Экран и клавиатура
Популярное:
|
Последнее изменение этой страницы: 2016-03-22; Просмотров: 1925; Нарушение авторского права страницы