
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Временные характеристики типовых динамических звеньев
Простейшие звенья. К простейшим динамическим звеньям относятся такие звенья, выходная величина которых пропорциональна входной величине, ее интегралу или производной. Эти звенья описываются линейным дифференциальным уравнением вида pgy(t)=kx(t) (g = -1; 0; 1) ( 1 ) где к— коэффициент передачи звена. Безынерционное звено (таблица1, п. 1 ). Безынерционным (пропорциональным) называют звено, которое как в установившемся, так и в переходном режиме описывается уравнением ( 1 ) при q=0. Уравнение звена имеет вид y(t) = kx(t) ( 2 )
Рисунок 1 - Примеры устройств, представляющих безынерционное звено: а — редуктор, б — рычаг: в — потенциометр; г — усилитель.
Предполагается, что реакция звена на входное воздействие происходит мгновенно, без всякой инерции. В действительности таких звеньев нет. Обычно устройство считают безынерционным, если его инерционность значительно меньше (на несколько порядков) инерционности других устройств, которые входят в систему. Примерами устройств, представляющих безынерционные звенья (рис. 1), являются редукторная передача (а), рычажная передача (б) в том случае, когда не учитывается масса рычага, потенциометр (е), преобразующий механическое перемещение ползунка в электрическое напряжение, пропорциональное этому перемещению, усилитель постоянного тока (г) и другие. Переходная функция звена h(t)=k*1(t) ( 3 ) Весовая функция
Передаточная функция звена
Таблица 1 Временные характеристики типовых звеньев
Интегрирующее звено (табл. 1, п. 2). Интегрирующее звено — это звено, у которого выходная величина пропорциональна интегралу по времени от входной величины:
или в операторной форме (q= +1)
где k— коэффициент пропорциональности. Продифференцировав уравнение ( 7 ), получим:
Из последнего уравнения видно, что скорость изменения выходной величины интегрирующего звена пропорциональна входной величине. Примерами реальных элементов (рис. 2), которые можно представить интегрирующим звеном, являются резервуар (а), двигатель постоянного тока (б), электрический конденсатор (в), индуктивность(г). Резервуар может быть представлен интегрирующим звеном, если принять уровень жидкости Н в качестве выходной величины, а разность расходов жидкости на притоке и на стоке
где S — площадь поверхности жидкости в резервуаре.
Рисунок 2 - Примеры устройств, представляющих интегрирующее звено: а — резервуар; б — двигатель постоянного тока; в — электрический конденсатор; г — катушка индуктивности.
Двигатель постоянного тока с независимым возбуждением (б) описывается уравнением
где Ua — входная величина (напряжение на якоре двигателя); ср — выходная величина (угол поворота вала). Процесс заряда конденсатора током I описывается уравнением
где С — емкость конденсатора. Магнитный поток Ф катушки (выходная величина) и приложенное напряжение U (входная величина) на рисунке 2, г связаны зависимостью
где w — число витков катушки. Переходную функцию звена получим, принимая x(t)=l(t) при нулевых начальных условиях:
Весовая функция звена имеет вид
Передаточная функция интегрирующего звена
Дифференцирующее звено (см. табл. 1, п. 3). Дифференцирующим называется такое звено, у которого в установившемся режиме выходная величина пропорциональна скорости изменения входной величины. Уравнение звена имеет вид
или в операторной форме (q = -1)
где к— коэффициент пропорциональности. На практике не существует такого реального элемента, в котором на выходе точно воспроизводилась бы производная от входного сигнала. Идеализированными примерами дифференциального звена могут служить (рис. 3) тахогенератор (а), электрический конденсатор (б), индуктивность (в).
Рисунок 3 - Примеры устройств, представляющих дифференцирующее звено: а — тахогенератор; б — электрический конденсатор; в — катушка индуктивности.
Напряжение тахогенератора зависит от частоты вращения якоря, которая является производной от угла поворота якоря, и может быть представлено зависимостью
где с — коэффициент пропорциональности. Если в схеме с конденсатором принять за входную величину напряжение U, а выходную — ток I, то
где С — емкость конденсатора. Если в схеме с индуктивностью принять за входную величину ток I, а выходную — напряжение самоиндукции на катушке, то
где L — индуктивность. Переходная функция звена имеет вид
Весовая функция звена имеет вид
где Передаточная функция звена записывается в виде
Популярное:
|
Последнее изменение этой страницы: 2016-03-22; Просмотров: 2638; Нарушение авторского права страницы

 ( 4 )
( 4 ) ( 5 )
( 5 ) 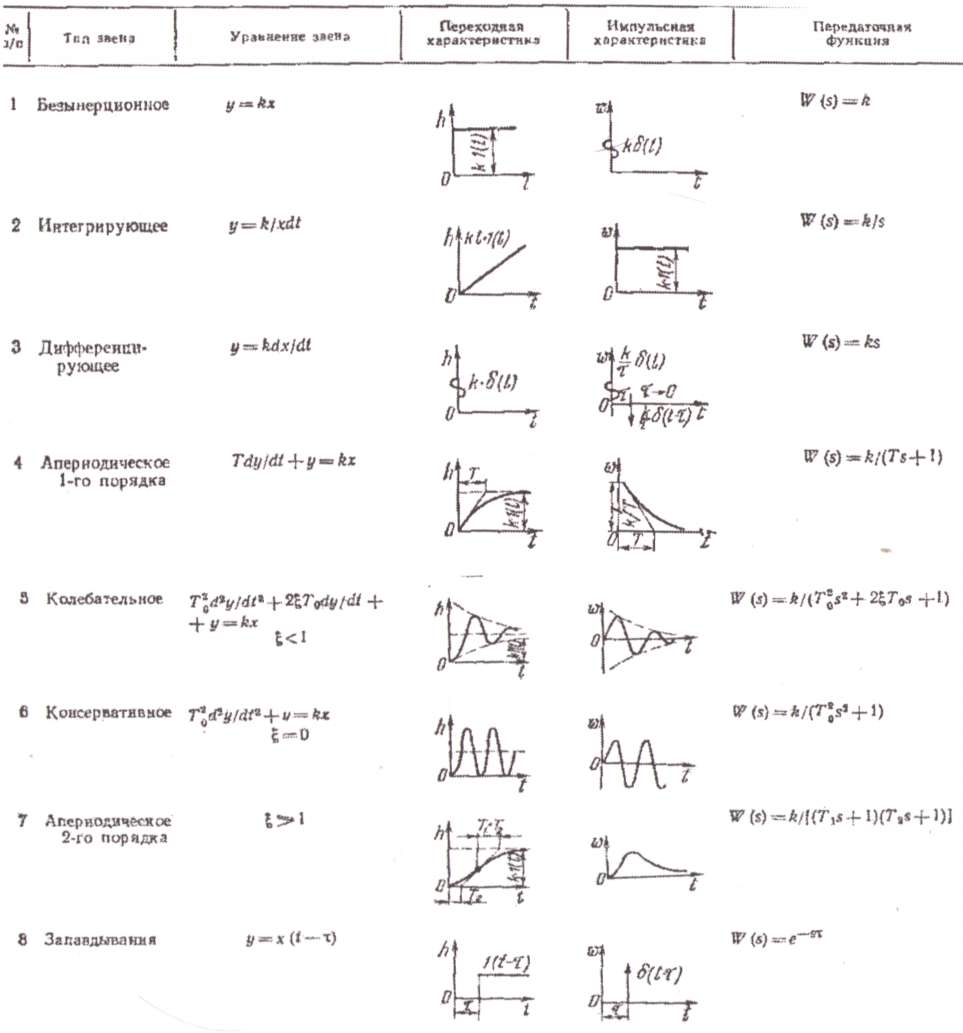
 ( 6 )
( 6 ) (7) ( 7 )
(7) ( 7 ) ( 8 )
( 8 ) — в качестве входной величины. Связь между этими величинами имеет вид
— в качестве входной величины. Связь между этими величинами имеет вид ( 9 )
( 9 )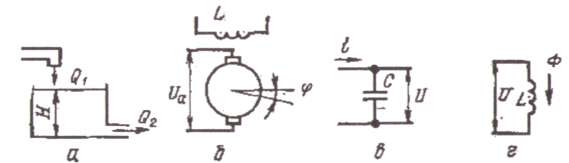
 ( 10 )
( 10 ) ( 11)
( 11)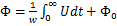 ( 12 )
( 12 ) ( 13 )
( 13 ) ( 14 )
( 14 ) ( 15 )
( 15 ) ( 16 )
( 16 ) ( 17 )
( 17 )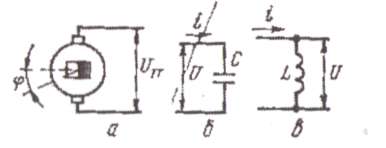
 (18)
(18) (19)
(19) (20)
(20) (21)
(21) (22)
(22) — производная от 5-функции или 5-функция второго порядка, графически изображенная в виде двух импульсов второго порядка, интервал между которыми т стремится к нулю.
— производная от 5-функции или 5-функция второго порядка, графически изображенная в виде двух импульсов второго порядка, интервал между которыми т стремится к нулю. . (23)
. (23)