
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Кинематика шарнирного четырехзвенника
Дано (рис. 5): Кинематическое исследование проводим, начиная с начального звена ℓ, а затем рассматриваем группу звеньев 2-3. Скорость точки В
Затем переходим к рассмотрению группы Ассура, состоящей из звеньев 2—3. Для этой группы известны скорости внешних кинематических пар (
Совместное решение этих двух векторных уравнений позволяет найти скорость точки С. Для этого в соответствии с первым уравнением из конца вектора Рв проводим ливню, перпендикулярную ВС, а из полюса (поскольку скорость точки Д равна нулю, и точка dнаходится в полюсе) проводим в соответствии со вторым уравнением линию, перпендикулярно ДС. В пересечении двух направлений относительных скоростей находим положение точки с, а следовательно, и скорость VC. Построив план скоростей, можем найти угловые скорости звеньев:
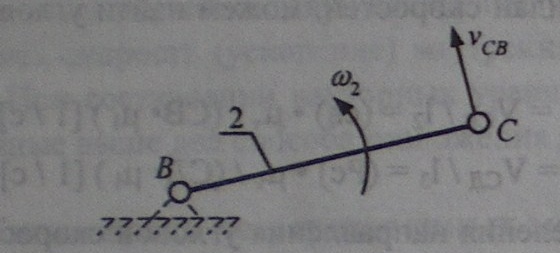
Для определения направления угловой скорости ω i вектор относительной скорости необходимо перенести в соответствующую точку на звене — угловая скорость будет направлена в сторону этого вектора. Для рассматриваемого механизма направление угловой скорости ω 2 (рис. 7) определится вектором относительной скорости Vcb перенесенным в точку С. План ускорений строим в той же последовательности, что и план скоростей, т.е. вначале рассматриваем начальное звено АВ, а затем группу Ассура 2—3. Рисунок 5. Схема шарнирного четырехзвенника для его кинематического исследования
Рис. 6. План скоростей шарнирного четырехзвенника
Рис. 7. Определение направления угловой скорости звена При равномерном вращении кривошипа ( Рассматриваемое ускорение направлено вдоль звена АВ к центру вращения, т.е. от точки В к точке А. Выбираем точку π — полюс плана ускорений — и из нее проводим линию, параллельную АВ. на которой откладываем произвольный отрезок π в, изображающий ускорение точки В на плане ускорений (рис 8). Рис. 8. План ускорений шарнирного четырехзвенника
Масштабный коэффициент построения плана определится как:
Для определения ускорения точки С составим два векторных равенства:
Нормальные составляющие определяются в соответствии с уравнениями:
Отрезки, которыми изображаются эти величины на плане. ускорений, определяются как:
На механизме нормальное ускорение Согласно второму векторному равенству, из полюса π параллельно звену CD проводим линию направления нормального ускорения В пересечении указанных линий тангенциальных состав ляющих находим точку с. Соединив ее с полюсом π найдем вектор (π с), определяющий ускорение точки С. Тогда:
Угловые ускорения
Для определения направления углового ускорения необходимо перенести вектор тангенциальной составляющей, например Если ε и ω направлены в одну сторону, движение звена ускоренное, если в противоположные, замедленное.
Популярное: |
Последнее изменение этой страницы: 2016-03-22; Просмотров: 1489; Нарушение авторского права страницы
 [м/мм].
[м/мм]. направлена перпендикулярно АВв сторону вращения кривошипа. Из полюса Р плана скоростей проводим линию, перпендикулярную АВ и на ней откладываем отрезок Рв (рис. 6), изображающий скорость
направлена перпендикулярно АВв сторону вращения кривошипа. Из полюса Р плана скоростей проводим линию, перпендикулярную АВ и на ней откладываем отрезок Рв (рис. 6), изображающий скорость  . Величина отрезка Рв выбирается произвольно. Масштабный коэффициент строящегося плана скоростей будет равен:
. Величина отрезка Рв выбирается произвольно. Масштабный коэффициент строящегося плана скоростей будет равен:  [м/с·мм].
[м/с·мм]. и
и  = 0), поэтому для нахождения скорости точки С можно написать два векторных равенства:
= 0), поэтому для нахождения скорости точки С можно написать два векторных равенства: 
 .
. [1/с]
[1/с] [1/с].
[1/с].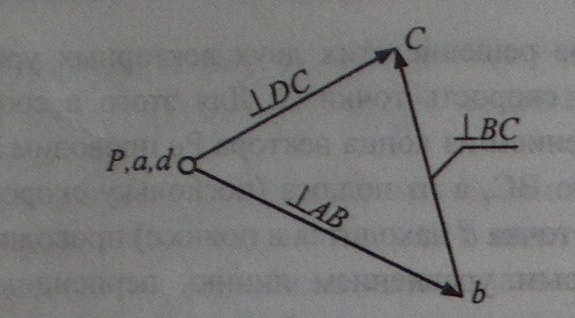
 ) ускорение точки В определяется как
) ускорение точки В определяется как  , при этом
, при этом  , т.к.
, т.к.  .
. [м/с2·мм].
[м/с2·мм]. (1 способ разложения движения),
(1 способ разложения движения),  (1 способ разложения движения).
(1 способ разложения движения). [м/с2],
[м/с2],  [м/с2].
[м/с2]. [мм]
[мм]  [мм].
[мм]. направлено от точки С к точке В, а ускорение
направлено от точки С к точке В, а ускорение  — от точки С к точке D. В соответствии с первым векторным равенством из конца вектора π в проводим линию, параллельную ВС, и на ней откладываем отрезок ncв, изображающий в масштабе
— от точки С к точке D. В соответствии с первым векторным равенством из конца вектора π в проводим линию, параллельную ВС, и на ней откладываем отрезок ncв, изображающий в масштабе  нормальное ускорение
нормальное ускорение  . Вектор
. Вектор  направлен от точки С к точке В. Из конца построенного вектора ncв проводим линию, перпендикулярную СВ, т.е. направление тангенциальной составляющей.
направлен от точки С к точке В. Из конца построенного вектора ncв проводим линию, перпендикулярную СВ, т.е. направление тангенциальной составляющей. . На ней откладываем отрезок ncd и из его конца проводим перпендикулярно CD линию направления второй тангенциальной составляющей.
. На ней откладываем отрезок ncd и из его конца проводим перпендикулярно CD линию направления второй тангенциальной составляющей. [м/с2].
[м/с2]. и
и  звеньев находятся из уравнений:
звеньев находятся из уравнений:  [1/с2];
[1/с2];  [1/с2].
[1/с2]. , соответствующую точку С звена ВС, и этот вектор покажет направление углового ускорения
, соответствующую точку С звена ВС, и этот вектор покажет направление углового ускорения  (рис. 5).
(рис. 5).