|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Методические указания для выполнения структурного анализа механизмаСтр 1 из 6Следующая ⇒
ТЕОРИЯ МЕХАНИЗМОВ И МАШИН Методические указания и задания к выполнению контрольных и самостоятельных работ для студентов всех специальностей дневной и заочной форм обучения ИПК СФУ УДК 531.8 (072) ББК 34.41
Печатается по разрешению Редакционно-издательского совета университета
Теория механизмов и машин: методические указания и задания к выполнению контрольных и самостоятельных работ для студентов всех специальностей дневной и заочной форм обучения/сост.: В.Я.Дьяконова, С.А.Косолапова, Т.А.Свизева; СФУ, ИГ.;
Изложена методика анализа структуры, кинематики и динамики плоских рычажных механизмов. Даны примеры.
©Сибирский Федеральный университет
Введение Теория машин и механизмов (ТММ) - одна из основных машиностроительных дисциплин, изучающая наиболее общие вопросы исследования и проектирования механизмов и машин. К таким вопросам относятся: 1) анализ механизмов - исследование структуры, кинематических и динамических свойств механизмов по их известным схемам; 2) синтез механизмов - проектирование механизмов по заданным структурным, кинематическим и динамическим параметрам. Курс теории механизмов и машин, как показывает опыт, является одним из труднейших для студентов высшей школы. Основной целью изучения курса теории механизмов и машин является научить будущего инженера самостоятельно решать те задачи, с которыми ему придется иметь дело на производстве. Это может быть достигнуто путем самостоятельного решения задач на практических занятиях и дома. Самостоятельное решение учащимися ряда примеров имеет большое значение: оно не только учит практическому применению методов исследования и проектирования механизмов, не только развивает расчетную технику, так необходимую будущему инженеру, но и обогащает учащегося представлением о новых, ему еще не известных схемах механизмов, тем самым расширяя его технический кругозор. Программа изучения дисциплины " Теория машин и механизмов" и задания, которые не вошли в данные методические указания, а также рекомендации для заочников при выполнении контрольных работ представлены в методических указаниях [1], курс лекций по ТММ представлен в учебном пособии [2]. При составлении предлагаемых методических указаний авторы стремились представить в нем примеры механизмов с точки зрения их возможного использования при решении различных практических задач. С этой целью авторы предлагают широко применяемые в технике четырехзвенные механизмы с низшими кинематическими парами. Студенты-механики часть заданий выполняют самостоятельно с дальнейшей защитой, а некоторые задачи преподаватель использует в качестве контрольной работы. Студенты немеханических специальностей, изучающие курсы " Теория механизмов и детали машин", " Прикладная механика", выполняют часть приведенных заданий соответствующего профиля. В данных методических указаниях для выполнения домашних заданий представлено 4 задачи различной степени сложности, дана методика их решения, а так же приведены примеры решения. Методические указания к решению задач для самостоятельных, контрольных и расчетно-графических работ В данной главе рассматриваются основные теоретические положения, используемые при решении задач. Методические указания по выявлению и устранению избыточных связей (Задача 2) В механизмах могут иметь место избыточные связи, которые дублируют ограничения, наложенные другими связями, не изменяя при этом кинематические свойства механизма. Наличие в механизме избыточных связей имеет свои достоинства и недостатки. Избыточные связи повышают жесткость механизма, уменьшают его деформации, но при этом повышаются требования к точности изготовления звеньев механизма и элементов его кинематических пар, обращая механизм в статически неопределимую систему. ℓ При неточности изготовления плоского механизма оси шарниров могут оказаться не параллельными и механизм обращается в пространственный. Количество избыточных (повторных, пассивных) связей определяют по формуле: q = W - 6n + 5p5 + 4p4 + 3p3 + 2p2 + p1 (2) где W - степень подвижности механизма; n - число подвижных звеньев; p5 - количество кинематических пар 5 класса; p4 - количество кинематических пар 4 класса; p3 - количество кинематических пар 3 класса; p2 - количество кинематических пар 2 класса; p1 - количество кинематических пар 1 класса. При проектировании механизмов и машин стремятся избавиться от избыточных связей введением в конструкцию механизма технологических зазоров. Для механизмов с жесткими звеньями этому конструктивному решению соответствует прием, связанный с повышением подвижности кинематических пар (например, вращательную пару заменить цилиндрической).
Методические указания для выполнения синтеза механизма по структурной формуле строения (задача 3) Синтез механизма - проектирование схемы механизма по структурной формуле его строения. Формула строения механизма состоит из ведущего звена с последовательным присоединением структурных групп Ассура. Изображать схему следует в произвольном масштабе с нумерацией звеньев и обозначением кинематических пар. После построения схемы механизма необходимо определить степень подвижности и показать каждую структурную группу, входящую в данный механизм. Методические указания для выполнения структурного, кинематического и силового исследования плоских рычажных механизмов (задача 4) Предлагаемые схемы механизмов для проведения структурного, кинематического и силового исследования обеспечивают привод подавляющего числа горно-металлургических машин и оборудования. В процессе проведения структурного анализа необходимо уяснить, что такое машина, механизм, звено механизма. Следует научиться выделять входные и выходные звенья механизма, уметь определять кинематические пары по числу степеней свободы (см. п. 1.1). Кинематическое исследование включает в себя: - построение плана механизма при заданном положении; определение крайних положений звеньев механизма; - построение 12 положений механизма (в направлении движения ведущего звена, начиная от крайнего положения) [2]; - построение траектории движения точки, лежащей по середине шатуна; - построение графика перемещений ползуна или точки, лежащей на коромысле [2]; - построение графиков скоростей и ускорений методом графического дифференцирования [2]; - определение скоростей точек механизма методом плана скоростей для заданного положения механизма; - определение ускорений точек механизма методом плана ускорений для заданного положения механизма. При проведении силового анализа следует: - определить силы тяжести звеньев, инерции и моменты пар сил инерции; представить группы Ассура в масштабе плана механизма для его заданного положения; - изобразить силы, действующие на звенья; - определить реакции в кинематических парах и уравновешивающую силу, приложенную в верхней точке кривошипа, механизма методом построения плана сил; - определить для всех структурных групп уравновешивающую силу с помощью рычага Н.Е. Жуковского; - сравнить величины уравновешивающих сил, полученных силовым расчетом механизма и с помощью рычага Н.Е. Жуковского; - определить мощность подводимую к кривошипу. Рассмотрим кинематическое и силовое исследования плоского рычажного механизма.
Примеры решения задач Пример 1 Определить структуру механизма двигателя Дизеля (рис 25, а) Решение. Количество подвижных звеньев n = 7. Составляем таблицу кинематических пар. Таблица 1. Таблица кинематических пар.
Рис 25 Механизм двигателя Дизеля: а) структурная схема б) структурные группы
3. Число кинематических пар пятого класса p5 = 10, четвертого класса - p4 = 0. 4. Число степеней подвижности механизма W = 3n – 2p = 1. 5. Раскладываем механизм на структурные группы (рис. 25, б) каждая из которых должна иметь W = 0. 6. Строение механизма (порядок присоединения групп): I (0-1) → II (2-3) → II (4-5) → II (6-7) Задача 2 Для механизма (рис.26, а).определить количество избыточных связей и устранить их. Рассмотрим четырехшарнирный механизм с кинематическими парами пятого класса (рис.26, а).
Рисунок 26 Четырехшарнирный механизм: а) с парами пятого класса б) без избыточных связей Количество избыточных связей: q = 1 - 6 × 3 + 5 × 4 = 3 Для создания статически определимого механизма две кинематические пары 5-го класса у шатуна заменим на две шаровые 3-го класса (рис. 26, б). Степень его подвижности W = 2 - вторая подвижность - безвредное вращение шатуна вокруг своей оси. Такой механизм (рис. 26, б) имеющий количество избыточных связей q = 2 - 6 × 3 + 5 × 2 +3 × 2 = 0 применяют во всех автомобилях в рулевой трапеции и передней подвеске (" Жигули" и " Москвич" ).
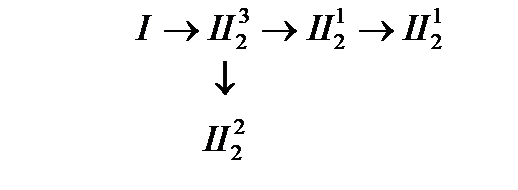
Задача 3 По формуле строения механизма изобразить его кинематическую схему со структурными группами Ассура. Дано: формула строения механизма: где I - механизм I класса, W = 1 - ведущее звено
Используя таблицу 2 создаем кинематическую схему механизма (рис.27) Рисунок 27 Механизм: а) кинематическая схема механизма; б) структурные группы Изобразим структурные группы Ассура (рис. 27, б) Степень подвижности механизма W = 3n - 2p5 - p4 = 3 × 5 - 2 × 7 = 1 Задача 4 Произвести структурный, кинематический и силовой расчет кривошипно-шатунного механизма (рис.28). Дано: ℓ OA = 0, 050 м; ℓ АВ = 0, 200 м; ℓ ВС = 0, 150 м; wОА =20 с-1; j = 60°; ℓ OС = 100 мм; МAС = 30 Н× м; G1 = 60 Н; G2 = 100 Н; G3 = 80 Н; Js2 = 0, 8 кг× м2; Js3 = 0, 6 кг× м2. Рис. 28 Кривошипно-шатунный механизм: 1- кривошип; 2 - шатун; 3 - коромысло Решение Силовой анализ механизма Начинаем расчет с группы звеньев 2 - 3, состоящей из шатуна (звено 2) и коромысла (звено 3). Покажем силы, действующие на группу -
Кроме того, освободим группу от связей, заменим их действие реакциями, Чтобы определить реакции в кинематических парах А и С, составим векторное уравнение равновесия для всей структурной группы.
Рассмотрим равновесие звена 2:
Рассмотрим равновесие звена 3.
Неизвестные по величине силы Задаемся масштабом сил, исходя из величины сил. Вычислим длины отрезков, изображающих силы на плане.
Рисунок 30. Кинематическое и силовое исследования кривошипно-шатунного механизма: а) план механизма; б) план скоростей; в) план ускорений; г) структурная группа Ассура с действующими силами; д) силовой многоугольник при определении реакций в кинематических парах
Рисунок 31 Ведущее звено: а) кривошип с действующими силами; б) план сил; с) рычаг Жуковского Строим план сил (рис.30, д).
Чтобы определить реакции в кинематической паре В составляем уравнение сил, действующих на звено 2:
где Векторы сил
Рассмотрим ведущее звено (рис.31). На ведущее звено действующие силы Кроме этих сил, к точке А приложен вектор, уравновешивающей силы Определим силу
Определяем
Знак (-) говорит о неверном направлении Реакцию
Масштаб сил - Определяем длины отрезков
Строим план сил (рис.31, б) Определяем уравновешивающую силу с помощью рычага Н.Е.Жуковского. Для этого план скоростей повернем на 90° и в соответствующих точках приложим векторы сил сохраняя их направление (рис.31, с). Составим сумму моментов этих сил относительно полюса p.
Отсюда
Сравним величины уравновешивающих сил, полученные силовым расчетом механизма и с помощью рычага Н.Е.Жуковского
что допустимо. Крутящий момент на кривошипе:
Мощность, подводимая к кривошипу:
3. Задания для выполнения самостоятельных и контрольных работ Данные контрольные задания подготовлены по теме «Структурный, кинематический и кинетостатический анализ и синтез плоских рычажных механизмов». Задача 1. Выполнить структурный анализ механизма (рис 32-35) Рис. 32 Структурные схемы рычажных механизмов Рис. 33 Структурные схемы рычажных механизмов Рис. 34 Структурные схемы рычажных механизмов Рис. 35 Структурные схемы рычажных механизмов Задача 2 Для механизмов, представленных на рис. 32-35, определить количество избыточных (пассивных) связей и устранить их. Задача 3 По структурной формуле механизма изобразить его кинематическую схему. Данные взять из таблицы 3. Таблица 3. Формулы строения механизмов
При образовании механизмов с W = 1 необходимо пользоваться следующими правилами: 1) Первая структурная группа присоединяется внешними свободными парами к подвижному (ведущему) звену и стойке. 2) Последующие группы могут присоединяться к любым различным звеньям механизма, но так, чтобы звенья группы имели относительную (по отношению друг к другу) подвижность. 3) По одной и той же схеме строения можно образовать несколько различных механизмов. Задача 4 Провести структурный, кинематический и силовой анализ плоского механизма представленного на рисунке 36-45. Данные согласно варианту взять из таблицы 4-15.
Рисунок 36 схема 1- кривошипно-шатунный механизм: 1 - кривошип; 2 - шатун; 3 - коромысло. Таблица 4
Рисунок 37 схема 2- кривошипно-шатунный механизм: 1 - кривошип; 2 - шатун; 3 - коромысло. Таблица 5
Рисунок 38 схема 3- кривошипно-шатунный механизм: 1 - кривошип; 2 - шатун; 3 - коромысло.
Таблица 6
Рисунок 39 схема 4- кривошипно-ползунный механизм: 1 - кривошип; 2 - шатун; 3 - ползун. Таблица 7
Рисунок 40 схема 5- кривошипно-шатунный механизм: 1 - кривошип; 2 - шатун; 3 - коромысло. Таблица 8
Рисунок 41 схема 6 - кривошипно-шатунный механизм: 1 - кривошип; 2 - шатун; 3 - коромысло. Таблица 9
Рисунок 42 схема 75- кривошипно-ползунный механизм: 1 - кривошип; 2 - шатун; 3 - ползун. Таблица 10
Рисунок 43 схема 8- кривошипно-шатунный механизм: 1 - кривошип; 2 - шатун; 3 - коромысло. Таблица 11
Рисунок 44 схема 9- кривошипно-шатунный механизм: 1 - кривошип; 2 - шатун; 3 - коромысло. Таблица 12 Популярное:
|
Последнее изменение этой страницы: 2016-03-22; Просмотров: 1327; Нарушение авторского права страницы
 ,
,  - структурная группа Ассура второго класса, второго порядка, 1 вида
- структурная группа Ассура второго класса, второго порядка, 1 вида - структурная группа Ассура второго класса, второго порядка, 2 вида.
- структурная группа Ассура второго класса, второго порядка, 2 вида. ,
,  - это известные силы и пары сил по направлению. Определим их величины:
- это известные силы и пары сил по направлению. Определим их величины: 
 (
(  из рис.30, в)
из рис.30, в)
 (
(  из рис. 30, в)
из рис. 30, в) ,
, 


 и
и  , которые раскладываем на две составляющие
, которые раскладываем на две составляющие  и
и  ,
,  и
и  (рис.31).
(рис.31).


 (рис.6)
(рис.6)


 (рис.4)
(рис.4)
 и
и  определим из плана сил (рис.30, д).
определим из плана сил (рис.30, д).







 следовательно
следовательно 
 т.е.
т.е. 

 - вектор реакции со стороны звена 3.
- вектор реакции со стороны звена 3. (кв),
(кв),  (вс),
(вс),  (cd) уже показаны на плане сил (см.рис.30, д), поэтому
(cd) уже показаны на плане сил (см.рис.30, д), поэтому  будет замыкающим вектором на плане сил.
будет замыкающим вектором на плане сил.
 ,
,  , сл стороны звена 2
, сл стороны звена 2  , со стороны стойки
, со стороны стойки  .
. .
. :
: 
 из рис.30, в)
из рис.30, в)
 .
.


 (из рис.31, а).
(из рис.31, а).
 .
. определим, построив план сил, согласно векторному уравнению:
определим, построив план сил, согласно векторному уравнению: 







 ,
, 











 I
I