
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Определение сил инерции звеньев
1. При поступательном движении звена равнодействующая сил инерции всех элементарных масс
приложена в центре S масс звена и направлена противоположно ускорению 2. Если звено совершает вращательное движение вокруг оси, совпадающий с центром масс, то силы инерции всех элементарных масс можно свести к паре сил с моментом (рис. 13):
где Знак «-» в формуле для Мин указывает на то, что момент направлен в сторону, противоположную угловому ускорению. Моментом инерции тела Js относительно какой-либо оси называется величина, равная сумме произведений элементарных масс этого тела на квадрат их расстояния до этой оси:
3. Звено совершает сложное движение (рис. 14). В этом случае движение звена раскладывается на переносное поступательное со скоростью и ускорением центра масс и на относительное вращательное движение вокруг центра масс. Силы инерции всех элементарных масс сводятся к равнодействующей силе инерции Сила инерции приложена в центре S масс звена и направлена в сторону, противоположную ускорению центра масс; момент инерции направлен в сторону, противоположную ε . 4. Звено совершает вращательное движение относительно оси, не проходящей через центр масс звена (рис. 15). Этот случай рассматриваем как общий случай сложного движения звена: силы инерции всех элементарных масс также сводятся к равнодействующей силе инерции 1.5.2 Определение Fин и Mин для кривошипно-ползунного механизма (рис. 16) Дано: ω 1 = const, ℓ 1, ℓ 2, φ 1 (положение механизма определяется обобщенной координатой φ 1), m1, m2, m3, Js1, Js2. Пусть центр масс 1 звена S1 находится в точке А (в центре вращения звена 1), S3 совпадает с точкой С; S2— посередине звена 2. Для определения Fинi и Mинi; надо знать линейные ускорения центров масс и угловые ускорения звеньев, для чего (при графическом решении задачи) необходимо построить планы скоростей и ускорений (рис. 17, а, б). Звено 1 совершает равномерное вращательное движение (так как ω 1 = const, то Mин1 = Js1 · ε 1 =0, так как ε 1= 0 (при ω 1 = const). Звено 2 совершает плоскопараллельное движение:
Для нахождения ускорения точки S2 воспользуемся теоремой о подобии: BS2 / ВС = вs2 / вс; вs2 = вс BS2 / ВС.
Рис. 12. Сила инерции звена при его поступательном движении (момент сил инерции равен нулю)
Рис. 13. Момент инерции звена при его вращении вокруг оси, проходящей через центр масс звена (сила инерции равна нулю)
Рис. 14. Сила и момент сил инерции звена, совершающего сложное движение
Рис. 15. Сила инерции и момент сил инерции звена, вращающегося вокруг оси, не проходящей через центр масс звена
Рис16. К определению сил и моментов сил инерции кривошипно-ползунного механизма
Рис. 17. План скоростей (а) и план ускорений (б) кривошипно-ползунного механизма
Найденный отрезок откладываем от точки в. Чтобы найти абсолютное ускорение центра масс, полученную точку s2 соединяем с полюсом плана ускорений. Тогда Сила инерции приложена в центре масс S2 и направлена в противоположную сторону от ускорения центра масс (рис. 16). Для нахождения момента инерции найдем угловое ускорение звена 2:
Для определения направления ε 2 перенесем вектор тангенциальной составляющей с плана ускорений на план механизма в точку С. Этот вектор показывает направление ε 2; Мин2 направлен в противоположную сторону. Звено 3 совершает поступательное движение в направляющих стойки. Сила инерции этого звена найдется как:
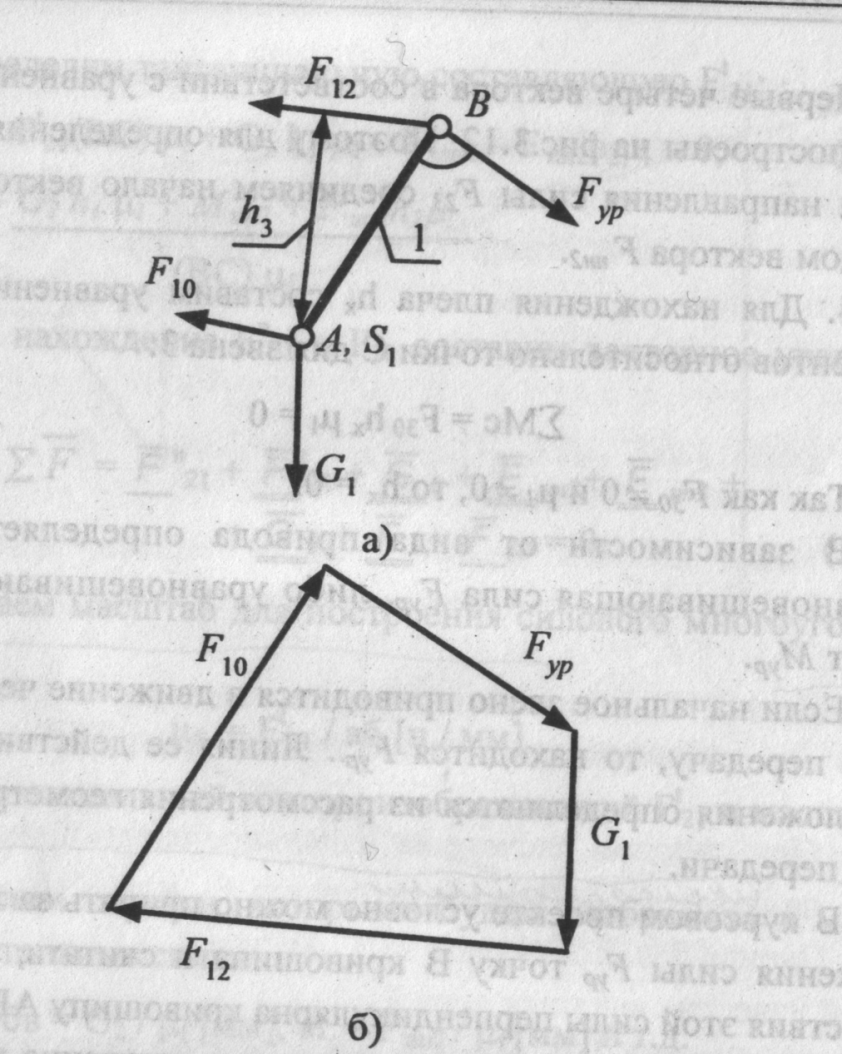
1.5.3 Определение реакций в кинематических парах и уравновешивающей силы кривошипно-шатунного механизма (рис. 18) Силовое исследование механизма ведут по группам Ассура, начиная его с последней присоединенной группы Ассура, для которой известны все внешние силы, и заканчивают расчет рассмотрением начального звена, на котором требуется определить уравновешивающую силу или момент. Дано: ω 1 = const, ℓ 1, ℓ 2, φ 1 G1, G2 G3, Fин2, Fин3, Мин2, F
Рис..18. Силовой расчет кривошипно-ползунного механизма Рис. 19. Реакции, действующие на звенья в группе Ассура второго класса, второго порядка, 2-го вида Рис. 20. Силовой многоугольник для определения реакций, действующих на звенья группы Ассура 2-го вида При силовом расчете за начальное звено принимают звено, на котором требуется определить Fyp или Мур. Звенья 2 и 3 образуют структурную группу Ассура второго класса, второго порядка, 2-го вида, для которой известна внешняя сила F. Изобразим структурную группу звеньев 2-3 в том же положении и в том же масштабе, что и на схеме механизма. Покажем реакции F21 и F30, которые заменяют действие отброшенных звеньев 1 и 0 (рис. 19). Составим таблицу, в которую будем записывать последовательность определения реакций, уравнения, которые надо составить для определения этих реакций и номера звеньев, для которых записываются эти уравнения.
Выбираем масштаб для построение силового многоугольника:
где аб – произвольный вектор изображающий Определим отрезки, которыми будут изображать в масштабе
После этого строим замкнутый (т.к. Σ
Полная реакция
Величина силы Для нахождения реакции
Первые четыре вектора в соответствии с уравнением (3) уже построены на рис.20. Поэтому для определения величины и направления силы В зависимости от вида привода определяется либо уравновешивающая сила Fyp, либо уравновешивающий момент Мур. В исследовании условно можно принять за точку приложения силы Fyp точку В кривошипа и считать, что линия действия этой силы перпендикулярна кривошипу АВ. Если начальное звено приводится в движение через муфту, то определяется Мур. Вариант 1. Определение Fyp (рис. 21, а).
1) откуда 2) В соответствии с записанным уравнением строим замкнутый векторный многоугольник сил (рис. 21, б), из которого определяем . Рис. 21. Расчет начального звена при действии на него уравновешивающей силы: а) силы, действующее на звено, б) силовой многоугольник. Вариант 2. Определение Мур (рис. 22 а, б).
1) откуда 2) План сил для определения
Рис. 22. Силовой расчет начального звена при действии на него уравновешивающего момента: а) силы, действующие на звено, б) силовой многоугольник. Популярное:
|
Последнее изменение этой страницы: 2016-03-22; Просмотров: 2932; Нарушение авторского права страницы

 центра S масс звена (рис. 12).
центра S масс звена (рис. 12). [Н·м],
[Н·м],  — статический момент инерции звена относительно оси, проходящей через центр масс перпендикулярно плоскости движения.
— статический момент инерции звена относительно оси, проходящей через центр масс перпендикулярно плоскости движения. [кг·м2].
[кг·м2]. и к паре сил с моментом.
и к паре сил с моментом.  .
. и к паре сил с моментом
и к паре сил с моментом  .
. ). Центр масс неподвижен и as = 0, следовательно, Fин1 = 0.
). Центр масс неподвижен и as = 0, следовательно, Fин1 = 0. ,
,  .
.




 .
. .
. [ 1 / с2].
[ 1 / с2]. и направлена в противоположную сторону от as3. Мин3 = 0, так как ε 3 = 0.
и направлена в противоположную сторону от as3. Мин3 = 0, так как ε 3 = 0.

 и
и 
 = 0
= 0
 (или
(или  )
)
 = 0
= 0
 :
:  ,
, 
 и
и  составляем векторное уравнение сил:
составляем векторное уравнение сил:  (3)
(3) [Н/мм]
[Н/мм] в масштабе
в масштабе  .
. остальные силы:
остальные силы:  [мм],
[мм],  [мм] и т.д.
[мм] и т.д. [Н] и
[Н] и  [Н].
[Н]. будет складываться из ее нормальной и тангенциальной составляющих:
будет складываться из ее нормальной и тангенциальной составляющих:  .
. будет равна:
будет равна:  [Н].
[Н]. составим векторные уравнения:
составим векторные уравнения:  .
. соединяем начало вектора
соединяем начало вектора  с концом вектора
с концом вектора  .
.
 = 0
= 0
 ,
,  [Н]
[Н]


 ,
,  [Н·м]
[Н·м]
 представлении на рис. 22, б.
представлении на рис. 22, б.